一种多机械臂快速救援智能机械车
1.本实用新型属于智能化机械控制塌方救援设备的技术领域,具体设计一种多机械臂快速救援智能机械车。
背景技术:
2.随着经济的发展,矿场资源的需求越来越大,世界各国普遍对矿业日益高度重视,我国是世界上矿场资源比较丰富,矿产资源配套程度较高的少数几个国家之一,但由于人口、资源需求的限制,我国对于矿产资源需求量仍旧较大。就目前而言,我国采矿大多数采用综合机械化采矿法。然而,因为工作疏忽或者地质突变,天气急转等不可控的意外因素的影响,很容易发生矿洞坍塌的危险,矿洞发生坍塌,整个矿洞会下陷,矿洞内氧气稀薄、二氧化碳含量较高,在此期间若有矿井工人正在进行作业或者日行检查时被困其中,往往缺少食物和淡水,而且大多都遭受碎石的撞击而负伤,无法自由行动以进行自救,因此如何采用合适的方式进行救援就成为了一个关键问题。
3.现在市面上的大部分矿井机器人都是负责侦察、检测的,很少有同时可以进行侦察检测和救援的。而-般进行救援的方式都是抢通进入通道,探明井下人员、设施、空气等情况,恢复矿井通风,再根据情况尽快将遇险人员救出地面。抢通进入井下通道的方法,最好是能恢复原有井巷,如果堵塞太严重无法恢复,那就需要从地面向井下打救援钻孔,耗费时间长。本实用新型可以自动检测路线然后进行挖掘,充分利用原有井巷快速到达待被困人员身边,同时机身自带有方槽可以便携挖土运土,机身整体占地体积较小,挖掘的速率也较快,大大提高了挖掘救援的效率。
技术实现要素:
4.为了解决上述发生的意外事故,本实用新型设计了一款能够在尽可能短的时间里将受困人员救援出来的一种多机械臂快速救援智能机械车,能够很大效率的实现救援工作。
5.本实用新型采用的技术方案是:一种多机械臂快速救援智能机械车,包括长方形的机械箱、四个机械臂,钻头及履带;所述的机械臂设有两个支撑臂,一个铲斗和多个油缸;所述的机械箱内部包括蓄电装置,四个数控泵,中央芯片控制单元,高频率电磁发射器和接受器,储油缸以及发动机;所述的机械箱的箱体外壁每一侧都装配有摄像头;所述的机械箱的箱体外壁每一侧都设有照明灯;所述的机械箱的前方装配有一钻头;所述的机械箱顶部沿四周有一椭圆形滑轨,滑轨上装有两个方形槽;所述的机械箱底部左右两侧装配有两条履带。
6.上述的多机械臂快速救援智能机械车中,所述的每个机械臂都装配有两个支撑臂,一个主动支撑臂,一个伸展支撑臂以及一个铲斗;主动支撑臂底部设有一油缸,油缸的输油管与机械箱内的数控泵相连接;伸展支撑臂两侧设有两个小油缸,分别与其相对应的数控泵相连接;伸展支撑臂的末端有一个铲斗,铲斗与伸展支撑臂由一个
油缸连接。
7.上述的多机械臂快速救援智能机械车中,所述的机械箱为一个长方形箱体,内部装置有控制单元,电力单元,动力输出装置,信号传输装置,油能装置,电磁波发射器和电磁波接收器。
8.上述的多机械臂快速救援智能机械车中,所述的钻头的材料为硬质合金刚,位于机械箱的正前方,与机械壁距离0.15m;当遇到较为坚硬的土石时,钻头将其钻碎,铲斗再进行挖掘。
9.上述的多机械臂快速救援智能机械车中,底盘的两条履带分别平行安置于机械箱的左右两侧,两个履带内侧面相距一定的距离,由机械箱内的发动机提供动力。
10.上述的多机械臂快速救援智能机械车中,所述的摄像头位于机械箱体壁的靠近壁外侧的位置,负责观察隧道内的情况,箱体壁的每一侧设置有两个,共装配有八个。
11.上述的多机械臂快速救援智能机械车中,所述的照明灯位于机械箱体壁的正中间,每一侧都设有一个,共装配有四个。
12.上述的多机械臂快速救援智能机械车中,所述的椭圆形滑轨沿着箱体四边装配于机械箱顶部;所述的椭圆形滑轨上安置有两个方形槽,方形槽可以在滑轨上自由移动。
13.上述的多机械臂快速救援智能机械车中,所述的中央芯片控制单元位于机械箱体内部的正中间;所述的电磁波发射器,位于机械箱内靠近前侧的位置,电磁波波频较高;所述的电磁波接受器,位于机械箱内靠近后侧的位置,负责接收来自地表控制器的信号,并与控制单元进行信息的交换;所述的蓄电装置,位于机械箱内部,负责给控制单元和传输单元进行供电;所述的四个数控泵分别位于机械箱内的靠近箱体壁四角的位置,数控泵四周设有出油口,分别与其对应的机械臂的油缸相连接。
14.与现有技术相比,本实用新型的有益效果是:
15.1.本实用新型能够在在挖掘的过程中检测周围环境,自动检测路线进行挖掘,外部人员也可通过机械车的电磁信号反馈看见实时情况,及时调整工作指令,减少工作过程中的失误,提高救援的效率。
16.2.本实用新型的装置体积较小,能灵活移动。
17.3.本实用新型同时备有四个挖掘的机械臂,便于挖掘工作的开展,提高挖掘速度。
18.4.本实用新型在车顶装配有两个方槽,挖掘与运土分开操作,不用特意操作车子进行运土,极大地提高了工作效率。
19.5.本实用新型在遇到较大的坚硬石块时,可操作车前的钻头辅助挖掘,无需再更换设备,能够节省宝贵的救援时间。
附图说明
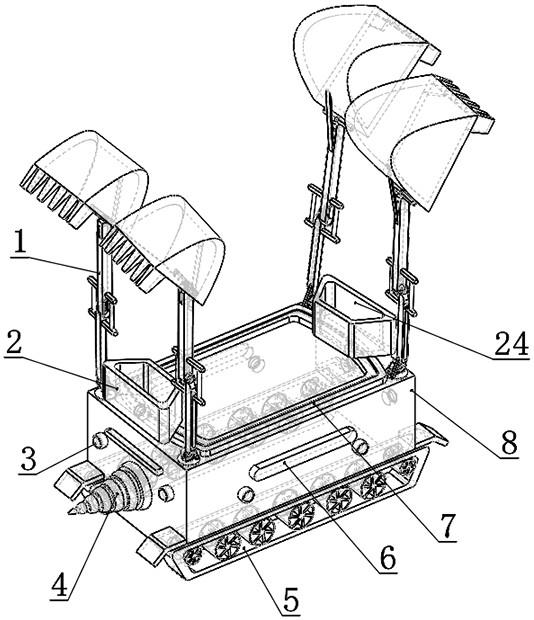
20.图1是本实用新型的整体结构示意图。
21.图2是本实用新型的机械臂结构图。
22.图3是本实用新型的机械箱的内部示意图。
23.图中:1—机械臂;2—方形槽;3—摄像头;4—钻头;5—履带;6—照明灯;7—椭圆形滑轨;8—机械箱;9—铲斗;10—油缸;11—伸展支撑臂;12—油缸;13—主动支撑臂;14—油缸;15—旋转盘;16—发动机;17—数控泵;18—电磁波接收器;19—中央芯片控制
单元;20—储油箱;21—电磁波发射器;22—钻头电机;23—蓄电装置;24—方形槽。
24.具体实施方式:
25.以下结合附图对本实用新型作进一步详细说明。
26.如图1、3所示,本实用新型包括四个相同的机械臂1,分别安置于机械箱8的四个边角的位置;所述的椭圆形滑轨7装配在机械箱8的顶部,椭圆形滑轨7上装置有两个方形槽2,可以沿着滑轨自由移动;所述的钻头4装配在机械箱8的正前方,与其同轴的机械箱8内部装载有一钻头电机22;所述的摄像头3装配在机械箱8的外壁上,每一侧外壁上都装配有两个,共装配有八个摄像头3;所述的照明灯6装配在机械箱8的外壁上,每一侧外壁上都装配有一个,共装配有四个摄像头6;所述的履带5平行装配在机械箱8的底部左右两侧,与机械箱8内部的发动机16相连接。
27.如图1、2所示,所述的机械臂1包括铲斗9、主动支撑臂13、伸展支撑臂11;整条机械臂1通过底部的旋转盘15与机械箱8相配合装配,旋转盘15与主动支撑臂13之间装配有一个油缸14,主动支撑臂13和伸展支撑臂11的两侧装配有两个油缸12,铲斗9和伸展支撑臂11之间的上方位置装配有一个油缸9。
28.如图3所示,所述的机械箱8内部四角处装配有四个数控泵。中间位置安装有一个中央芯片控制单元,前后两侧分别放置有电磁波接收器18和电磁波发射器21。储油箱20以及蓄电装置19安置在主控单元两侧。
29.下面结合附图说明本实用新型的安装过程:
30.(1)将四个机械臂1通过旋转盘15与机械箱8相连接。
31.(2)钻头4通过轴承杆与机械箱8配合。
32.(3)将八个摄像头3分为四组,两个摄像头为一组;四组摄像头3分别安置在机械箱8的外壁,每组都对称分布在外壁上。
33.(4)将四个照明灯6分别装配在机械箱外壁上,长条型的照明灯6平行安置。
34.本实用新型的工作原理如下:在矿井、深坑作业时,不稳定的地理和环境变换因素,再加上人为的操作失误,时而会发生矿洞坍塌的危险。若采用大型的冲击钻钻地,将耗时耗力,而且很容易造成二次坍塌。本机械车体积较小,在探测到合适位置后,先由冲击钻打出一个深孔,然后投放机械车。机械车向前方进行挖洞救援任务,前面两个机械臂进行挖掘,挖下的土装填到前方的方形槽1中。机械箱前面的钻头负责辅助挖掘,遇到松软的土石时,电机功率较小;当遇到较硬的硬石时,电机功率加大,将土石钻碎后,前面两个机械臂将其挖入方形槽中。方形槽装填满后,方形槽和方形槽位置互换,方形槽转到前方,进行填土。调换位置后,后方的两个机械臂负责将方形槽中的土运送到侧后方,土顺着沿线的两侧运下。前方槽装土的频率与后方槽卸土的频率基本一致,当前方装土的槽装填满时,后方卸土的槽也基本挖空,此时,两个方形槽再一次进行位置的调换,如此循环往复工作。机械箱四周的照明灯打开,摄像头也开启,负责观察四周的情况。如果遇到较难前行,或者矿洞极度松软的情况时,机械车还可以进行转向,避开前方无法前行的道路。在机械车的后方会有工作人员搭建支撑杆。摄像头观察到的情况在借由电磁波发射器将看到的景象传输到外部电子显示屏上,外部人员可以及时了解隧道内情况。隧道口的口径要大于机械车,便于机械车的通行,也便于工作人员到达目的地后可以无障碍的进入救援。通过控制机械车
的路径,从而解决短时间内将被困人员救援出来的问题。
35.在实际使用过程中,应考虑到以下几个因素:
36.(1)根据不同塌方的深度,适当对电磁波频率进行调节,有效控制机械车。
37.(2)根据前方不同的道路情况,调整机械车的行进方向,避开较难行进的路,加快救援速度。
38.(3)根据不同的作业距离,可以调整机械车下挖的倾斜角度,以便调整机械车与被救援人员的距离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1