检测挖掘机的上部结构和底架的相对位置的制作方法
本发明的实施例涉及一种操作施工机器的方法,所述施工机器包括上部结构和可旋转地联接到所述上部结构的底架。本发明的一些实施例涉及配置为执行所述方法的施工机器和/或计算机系统。
背景技术:
1、诸如挖掘机、反铲挖土机、采矿机铲等的施工机器用于挖掘工作。这些挖掘机通常包括上架,也称为上部结构,和底架,其中上部结构可旋转地安装于底架上。在电子侧,施工机器通常包括操作员辅助系统,例如卡特彼勒hms操作员辅助系统,该操作员辅助系统设计成防止施工机器的附件的机械部件撞击机械限位开关,或者至少通过相应地减慢其速度来减轻附件的冲击。
2、由于挖掘机、反铲挖土机、采矿机铲等通常在恶劣的环境中操作,在本领域中存在保持底架基本上没有电子和/或敏感部件的趋势。按照这种方法,施工机器的电子基础设施几乎完全在上部结构内实现。在一些情况下,上部结构检索非常独立于底架的诸如方位、加速度等重要的控制数据。作为示例,诸如卡特彼勒riser或r2模块的当前水平传感器技术检索上部结构的绝对角度,该绝对角度与底架的方位完全不相关。因此,操作员辅助系统可能不知道底架朝向上部结构的相对位置。由于底架未被映射在操作员辅助系统中,因此其落入操作员的职责范围内,以避免作业实施中撞击和损坏底架的轨链。为了进一步增加操作的安全性,希望将避免撞击和损坏底架的任务从操作员转移到操作员辅助系统。
3、将角度传感器放置在上部结构和底架之间的转环的中心并不总是可行的。例如,在交流供电的施工机器中,通常电力电缆布线通过机械的垂直中心线的中间部分,不允许用于实现角度传感器的空间。为了将这种角度传感器集成到转环中,需要几个更远及的设计变化。鉴于此,这样的角度传感器布置被认为是关于预期益处的过于昂贵的升级。
技术实现思路
1、考虑到现有技术,本发明的目的是提供一种改进的方法,用于以简单、稳健、成本有效的方式操作施工机器,因为需要施工机器的多种多样的设计配置。此外,应提供经配置以实施所述方法的施工机器和计算机系统。
2、这通过具有权利要求1的特征的操作包括上部结构和与上部结构联接的底架的施工机器的方法以及根据权利要求14的施工机器和配置成执行根据权利要求15的方法的计算机系统来解决。在本说明书、附图、从属权利要求中阐述了优选实施例。
3、因此,提供了一种操作施工机器的方法,该施工机器包括可旋转地联接到底架上的底架中的上部结构。该方法包括在操作机器时以上部结构和底架之间的预定的相对角度检索触发信号的步骤和检索上部结构的绝对角度的步骤。该方法还包括基于触发信号和绝对角度计算上部结构和底架之间的当前相对角度的步骤。
4、此外,提供了一种施工机器,其包括可旋转地安装在上部结构上的上部结构中的底架。该施工机器包括:绝对角度检测装置,用于检测上部结构的绝对角度;传感器单元,配置为当上部结构与底架处于预定的相对角度时检索触发信号;以及操作员辅助系统,用于基于绝对角度和触发信号计算当前相对角度。
5、此外,提供了一种计算机系统,该计算机系统配置成执行控制包括上部结构和可旋转地联接到上部结构上的底架的施工机器的方法。结合该方法和施工机器描述的技术特征也可以涉及并应用于所提出的计算机系统,反之亦然。
技术特征:
1.一种操作施工机器(10)的方法,所述施工机器(10)包括上部结构(100)和能够旋转地联接到所述上部结构(100)的底架(200),所述方法包括:
2.根据权利要求1所述的方法,进一步包括以所述上部结构(100)与所述底架(200)之间的至少一个另外的预定的相对角度(α)检索(s10)至少一个另外的触发信号(t)。
3.根据权利要求1或2所述的方法,进一步包括每次接收到触发信号(t)时重新计算所述上部结构(100)和所述底架(200)之间的所述当前相对角度(γ)的步骤(s30)。
4.根据前述权利要求中任一项所述的方法,其中,所述预定的相对角度(α)是45°、90°、180°和/或270°中的至少一个。
5.根据前述权利要求中任一项所述的方法,其中,检索所述触发信号(t)是通过设置在所述上部结构(100)上的传感器单元(140)实现的,其中,所述传感器单元(140)由设置在所述底架(200)上的触发单元(230)触发。
6.根据权利要求5所述的方法,其中,所述传感器单元(140)包括开关,所述触发单元(230)包括开关致动器。
7.根据权利要求5或6所述的方法,其中,所述传感器单元(140)包括霍尔传感器,所述触发单元(230)包括磁体。
8.根据权利要求5至7所述的方法,其中,所述触发单元(230)设置在转环(150)的下部(160)上,所述传感器单元(140)设置在所述转环(150)的上部(170)上和/或所述上部结构(100)上。
9.根据前述权利要求中任一项所述的方法,进一步包括检索对应于所述上部结构(100)和/或所述底架(200)的几何信息(η)的步骤(s4)。
10.根据权利要求9所述的方法,进一步包括以下步骤(s5):基于所述上部结构(100)与所述底架(200)之间的当前相对角度(γ)来计算所述底架(200)与所述上部结构(100)的部件之间的至少一个当前相对距离(d)。
11.根据权利要求10所述的方法,还包括步骤(s6):如果所述至少一个当前相对距离(d)满足预定条件(p),则限制所述上部结构(100)的部件和/或所述底架(200)的致动。
12.根据前述权利要求中任一项所述的方法,进一步包括以下步骤(s50):计算对应于所述底架(200)的形状的虚拟包络(e),优选地,其中所述虚拟包络(e)以预定距离(e1)跟随所述底架(200)的轮廓。
13.根据权利要求12所述的方法,还包括步骤(s60):如果所述部件到达所述虚拟包络(e)或与所述虚拟包络(e)相交,则限制所述上部结构(100)的部件和/或所述底架(200)的致动。
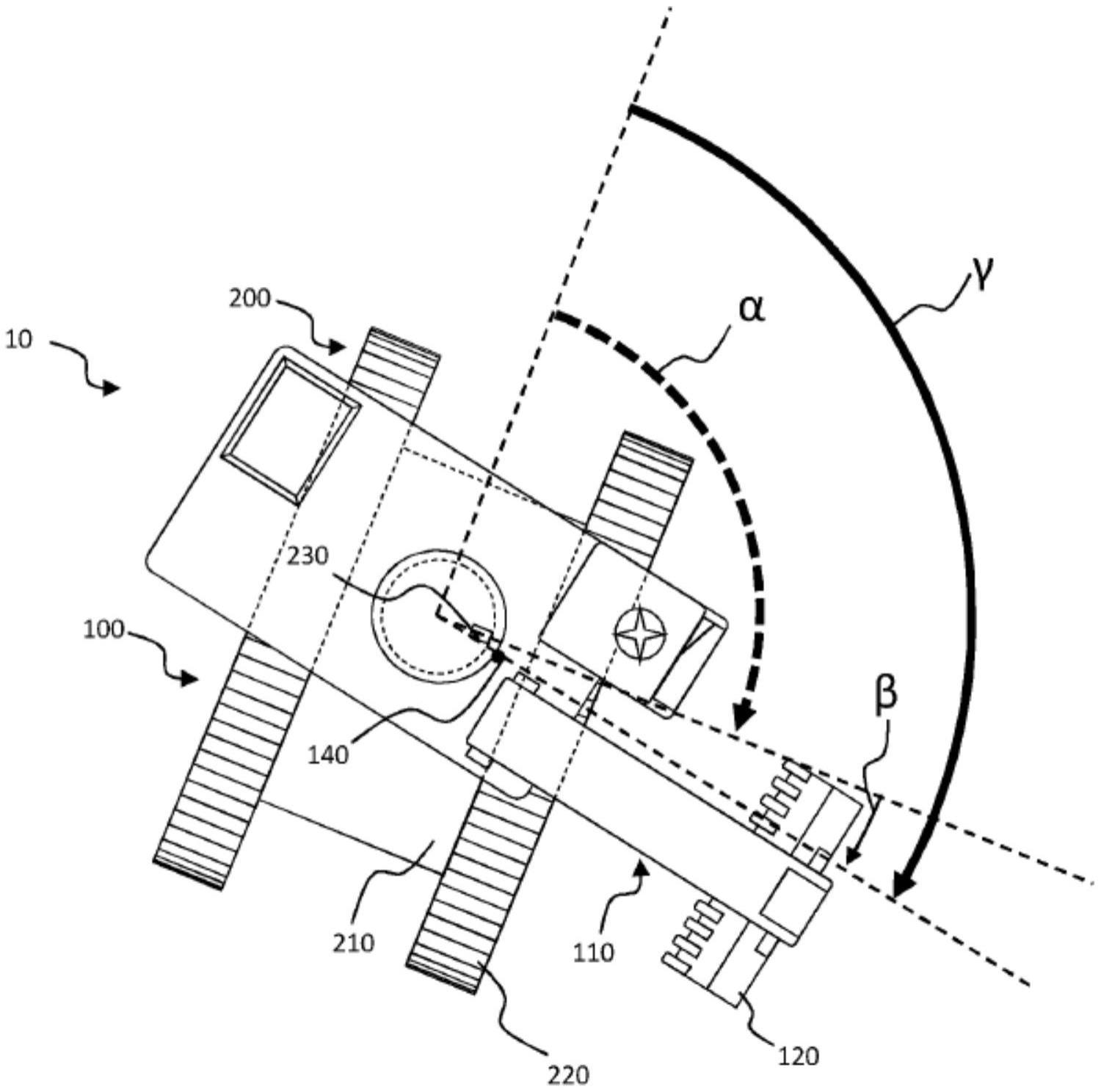
14.一种施工机器(10),包括底架(200)和能够旋转地安装在底架(200)上的上部结构(100),所述施工机器(10)包括:绝对角度检测装置(130),用于检测所述上部结构(100)的绝对角度(β);传感器单元(140),配置为当所述上部结构(100)与所述底架(200)处于预定的相对角度(α)时检索触发信号(t);以及操作员辅助系统,用于基于所述绝对角度(β)和所述触发信号(t)计算当前相对角度(γ)。
15.一种计算机系统,配置为执行根据前述权利要求1至13中任一项所述的方法。
技术总结
一种操作施工机器(10)的方法。所述施工机器(10)包括上部结构(100)和可旋转地联接到所述上部结构(100)的底架(200)。所述方法包括在操作所述机器(10)的同时以所述上部结构(100)与所述底架(200)之间的预定的相对角度(α)检索(S1)触发信号(T);检索(S2)所述上部结构(100)的绝对角度(β)。该方法还包括基于触发信号(T)和绝对角度(β)计算(S3)上部结构(100)和底架(200)之间的当前相对角度(γ)。
技术研发人员:M·比特
受保护的技术使用者:卡特彼勒全球矿业HMS有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!