履带式作业机械的制作方法
本公开涉及履带式作业机械。
背景技术:
1、以往,已知一种具有左右行星齿轮机构、油压驱动式的左右转向离合器、油压驱动式的左右转向制动器、以及转弯马达的履带式作业机械(例如推土机等)(参照专利文献1)。
2、左右行星齿轮机构配置在输入轴与左右输出轴之间。左右转向离合器可以输入轴为中心进行旋转,对由左右行星齿轮机构进行的旋转动力从输入轴向左右输出轴的传递及切断进行切换。左右转向制动器对左右输出轴进行制动。转弯马达使左右输出轴产生转数差而使左右转向离合器旋转。
3、专利文献1所述的履带式作业机械使左右转向离合器卡合,使左右转向制动器释放,并且使转弯马达驱动,由此而以平缓转弯模式进行转弯。
4、专利文献1所述的履带式作业机械使内侧转向离合器释放,使内侧转向制动器制动,由此而以原地转弯模式进行转弯。
5、现有技术文献
6、专利文献
7、专利文献1:(日本)特开昭53-27929号公报
技术实现思路
1、发明所要解决的技术问题
2、可是,在从平缓转弯模式向原地转弯模式切换时,为了防止内侧转向制动器发生拖曳现象,需要在使内侧转向离合器释放后,使内侧转向制动器制动。然而,在内侧转向离合器被释放后、至内侧转向制动器实际产生制动力期间,在由外侧履带的驱动产生的内侧履带的连带转动下,出现直行现象,转弯半径一时增大。
3、同样,在从原地转弯模式向平缓转弯模式切换时,为了防止内侧转向制动器发生拖曳现象,需要在使内侧转向制动器释放后,使内侧转向离合器卡合。然而,在内侧转向制动器被释放后、至内侧转向离合器实际卡合期间,在由外侧履带的驱动产生的内侧履带的连带转动下出现直行现象,转弯半径一时增大。
4、本公开的目的在于提供一种履带式作业机械,该履带式作业机械能够在从平缓转弯模式向原地转弯模式切换时、以及从所述原地转弯模式向所述平缓转弯模式切换时的至少一方,抑制转弯半径一时增大。
5、用于解决技术问题的技术方案
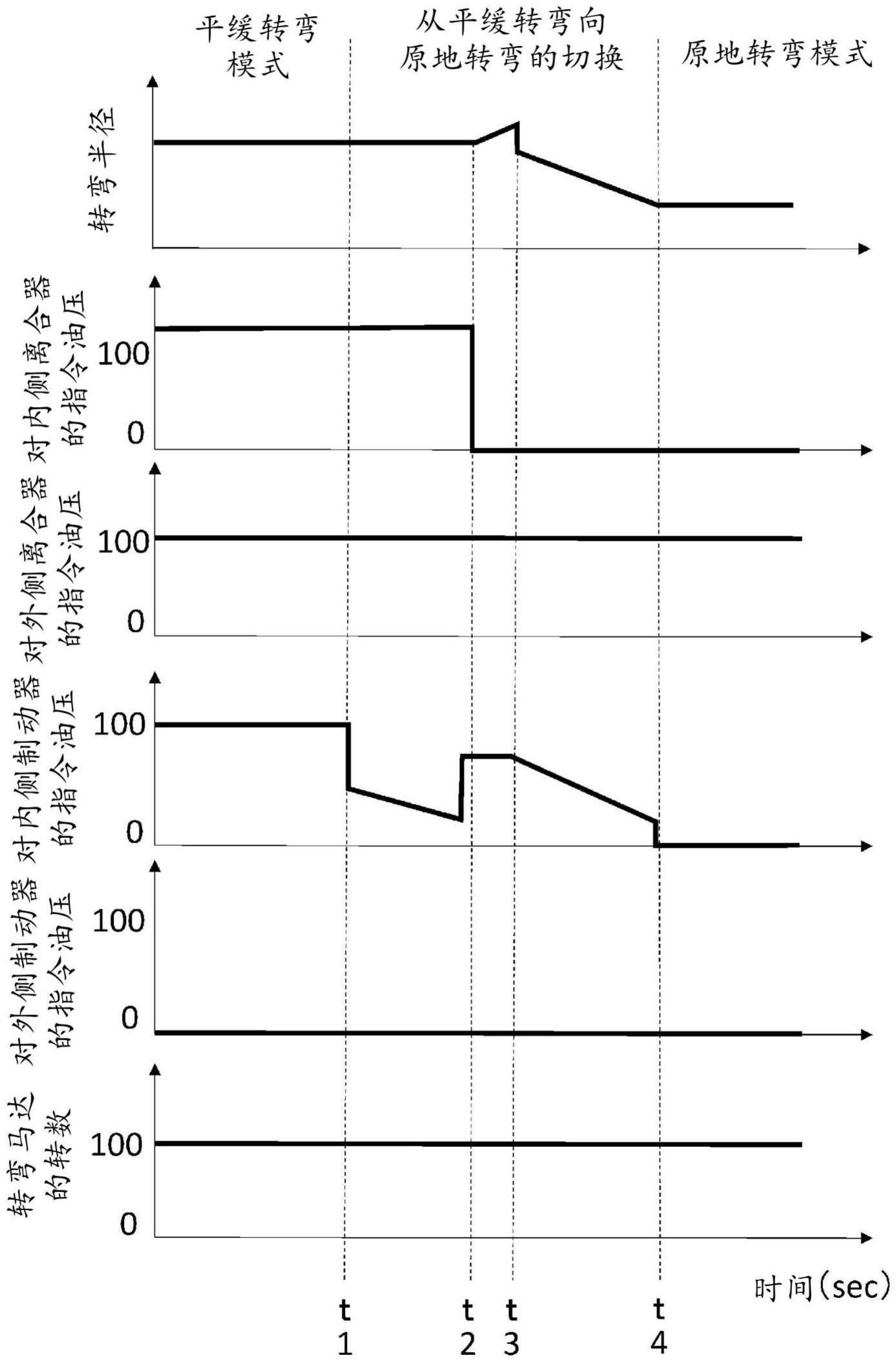
6、本公开的一个侧面的履带式作业机械具有:左右行星齿轮机构、左右转向离合器、左右转向制动器、转弯马达、以及控制器。左右行星齿轮机构配置在输入轴与左右输出轴之间。左右转向离合器可以输入轴为中心进行旋转,对由左右行星齿轮机构进行的旋转动力从输入轴向左右输出轴的传递及切断进行切换。左右转向制动器对左右输出轴进行制动。转弯马达使左右输出轴产生转数差而使左右转向离合器旋转。控制器通过控制左右转向离合器、左右转向制动器及转弯马达,以平缓转弯模式及原地转弯模式的任意模式使履带式作业机械转弯。左右转向离合器及左右转向制动器各自通过供给工作油而驱动。控制器在平缓转弯模式中,使左右转向离合器卡合,使左右转向制动器释放,使左右输出轴之中与转弯方向对应的内侧输出轴的转数比与转弯方向相反的外侧输出轴的转数低地使转弯马达驱动。控制器在原地转弯模式中,使左右转向离合器之中与转弯方向对应的内侧转向离合器释放,使左右转向制动器之中与转弯方向对应的内侧转向制动器制动,使内侧输出轴的转数比外侧输出轴的转数低地使转弯马达驱动。控制器在从平缓转弯模式向原地转弯模式切换时、以及从原地转弯模式向平缓转弯模式切换时的至少一方,在从切换开始之后的规定时间内,维持内侧转向离合器的卡合或者内侧转向制动器的制动。
7、发明的效果
8、根据本公开的技术,能够提供一种履带式作业机械,该履带式作业机械能够在从平缓转弯模式向原地转弯模式切换时、以及从所述原地转弯模式向所述平缓转弯模式切换时的至少一方,抑制转弯半径一时增大。
技术特征:
1.一种履带式作业机械,其特征在于,具有:
2.如权利要求1所述的履带式作业机械,其特征在于,
3.如权利要求1或2所述的履带式作业机械,其特征在于,
4.如权利要求1至3中任一项所述的履带式作业机械,其特征在于,
5.如权利要求1至4中任一项所述的履带式作业机械,其特征在于,
6.如权利要求5所述的履带式作业机械,其特征在于,具有:
技术总结
本发明提供一种履带式作业机械。推土机(1)具有的控制器(100)在从平缓转弯模式向原地转弯模式切换时,在从切换开始的切换开始时间点(t1)之后的规定时间内(t3-t1),维持内侧转向离合器(40<subgt;IN</subgt;)的卡合,在从原地转弯模式向平缓转弯模式切换时,在从切换开始的切换开始时间点(t11)之后的规定时间内(t13-t11),维持内侧转向制动器(50<subgt;IN</subgt;)的制动。
技术研发人员:吉川刚史,竹岛宏明,秋山直也,中田和志,矢津田修,大高慎一,行木悠史,长坂亮一,幸村贵臣
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!