高效水下清淤机器人的制作方法
1.本发明涉及暗涵清淤设备制造技术领域,特别是涉及一种高效水下清淤机器人。
背景技术:
2.随着城市化进程加剧,许多城市河道空间不断被侵占、挤压,河道上方被人为铺设水泥板,再在水泥板上覆盖路基或房基,修桥、修路、建楼房等,原有的河道就改造成了暗涵。伴随着大量污水被直排入暗涵,黑暗、密闭的河道空间内随之产生厌氧发臭、淤泥沉积等问题,如果不对这些“黑臭”通道加以整治,将严重影响城市环境、破坏城市形象。
3.然而,由于暗涵清理需要在密闭空间作业,而暗涵内淤泥经多年沉积,聚积着大量有毒有害气体,施工人员需佩戴防毒面具作业,施工安全隐患大、效率低;此外,由于汛期降雨频繁,施工风险较高,多数工程只能抢抓非雨季施工,时间短、工期紧、任务重,人工清淤施工难度极大,费时费力;因此,一种水下清淤机器人应运而生。但现存的水下清淤机器人普遍是一体化设计,在清理淤泥的同时还连带负责垃圾的转运,而履带行走机构虽能有效防止打滑,但行动迟缓,严重影响着清淤效率;此外,现有清淤过程往往采取抽吸式作业,但暗涵内时常存在大块的生活垃圾、建筑垃圾等,极易造成清淤系统的堵塞,使工作人员不得不频繁下井摘除堵塞的垃圾,进一步影响了机器人的作业效率。
4.因此,有必要设计一种改进的高效水下清淤机器人,以解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种能够实现清淤过程与垃圾清理过程独立进行,显著提高清淤效率且实用性极强的高效水下清淤机器人。
6.为实现上述目的,本发明提供如下技术方案:
7.一种高效水下清淤机器人,包括清淤设备和设置于所述清淤设备后端与所述清淤设备配合使用的垃圾传送小车;所述清淤设备包括机体、设置于所述机体最前端的淤泥清理机构、贯穿所述机体并与所述淤泥清理机构配合使用的链条输送机构、以及设置于所述机体下方的履带行走机构,所述链条输送机构的末端设置有旋转门;所述垃圾传送小车包括料斗和设置于所述料斗下方的轮式行走机构;所述链条输送机构将所述淤泥清理机构收集到的淤泥传送至所述清淤设备后方的所述垃圾传送小车内,由所述垃圾传送小车快速将垃圾转运出去。
8.作为本发明的进一步改进,所述链条输送机构包括从地面延伸至所述机体右上方的传送通道,设置于所述传送通道内,沿所述传送通道的延伸方向对称设置的两根链条、均匀设置于所述链条间的若干片刮板,以及设置于所述传送通道出口端的所述旋转门。
9.作为本发明的进一步改进,所述旋转门通过设置于所述旋转门底端的门轴与所述传送通道转动连接。
10.作为本发明的进一步改进,所述传送通道的末端呈弧形设置且开口向下。
11.作为本发明的进一步改进,所述刮板的板面垂直于所述传送通道的底面,且所述
刮板的延伸方向与所述链条的环绕方向相垂直。
12.作为本发明的进一步改进,所述传送通道的前端设有喇叭口。
13.作为本发明的进一步改进,所述传送通道的内壁上方分别设置有第一物料传感器和第二物料传感器,所述传送通道的顶部分别设置有第一监控照明系统和第二监控照明系统;所述第一物料传感器与所述第一监控照明系统设置于所述传送通道的入口端;所述第二物料传感器与所述第二监控照明系统设置于所述传送通道的出口端。
14.作为本发明的进一步改进,所述淤泥清理机构包括设置于所述机体最前端与所述机体转动连接的铲斗、与所述铲斗一端铰接的第一摆臂、与所述第一摆臂另一端铰接的第二摆臂,以及连接在所述机体前端的销轴,所述销轴的另一端通过转接件与所述第二摆臂铰接。
15.作为本发明的进一步改进,所述垃圾传送小车的下方底盘上设置有剪刀撑和电动缸,所述剪刀撑的上方分离式设置有所述料斗。
16.作为本发明的进一步改进,所述底盘下方的中部固定设置有动力电池和应急电池,所述动力电池和所述应急电池的外围设置有所述轮式行走机构。
17.本发明的有益效果是:
18.1.本发明的高效水下清淤机器人,通过在清淤设备后方设置独立的垃圾传送小车,能够实现在垃圾转运过程中不妨碍清淤过程的正常进行,从而显著提升清淤效率。
19.2.本发明的高效水下清淤机器人,通过设置全方位灵活摆动的淤泥清理机构以及与其密切配合前端呈喇叭口式的链条输送机构,能够一方面有效避免大块垃圾对传统机器人清淤系统的堵塞,提高清淤效率,降低安全隐患和劳动强度;另一方面也使得铲斗方便铲除清淤设备两侧的垃圾,实现无死角清淤,避免清淤设备离暗涵边较近时易引发刮碰。
20.3.本发明的高效水下清淤机器人,通过在传送通道的末端安装旋转门,可根据需要调整旋转门的旋转角度,以实现垃圾可以落入料斗内的不同位置,避免了堆料问题,提高了料斗的容积利用率,从而减少料斗的倾倒次数,进一步提升效率。
21.4.本发明的高效水下清淤机器人,通过在料斗下方设置剪刀撑,用于推动装满垃圾的料斗升高至洞口边缘,从而方便了工人悬挂吊具,使料斗30的更换过程非常方便,进一步提升了垃圾的清理效率。
附图说明
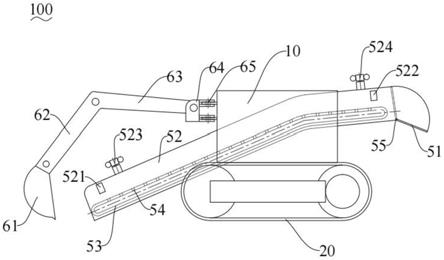
22.图1为本发明的高效水下清淤机器人的清淤设备的结构示意图。
23.图2为本发明的高效水下清淤机器人的垃圾传送小车的结构示意图。
24.图3为本发明的高效水下清淤机器人的清淤设备前端的结构示意图。
25.附图标记
26.100-高效水下清淤机器人;10-机体;20-履带行走机构;30-料斗;31-底盘;32-剪刀撑;33-电动缸;34-动力电池;35-应急电池;40-轮式行走机构;51-旋转门;52-传送通道;521-第一物料传感器;522-第二物料传感器;523-第一监控照明系统;524-第二监控照明系统;525-喇叭口;53-链条;54-刮板;55-门轴;61-铲斗;62-第一摆臂;63-第二摆臂;64-转接件;65-销轴。
具体实施方式
27.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
28.在此,还需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
29.另外,还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
30.请参阅图1至图2所示,本发明提供了一种高效水下清淤机器人100,包括清淤设备和设置于清淤设备后端与清淤设备配合使用的垃圾传送小车;清淤设备包括机体10、设置于机体10最前端的淤泥清理机构、贯穿机体10并与淤泥清理机构配合使用的链条输送机构、以及设置于机体10下方的履带行走机构20;如此设置,通过采用链条式输送机构将淤泥清理机构收集到的淤泥传送至清淤设备后方的垃圾传送小车内,改变了现有技术中的清淤机器人依靠抽吸式作业清理淤泥时易造成抽吸管道堵塞的现状,同时也方便了对暗涵内大块垃圾的一次性清理,减轻了清淤人员的工作强度。
31.垃圾传送小车包括料斗30和设置于料斗30下方的轮式行走机构40。如此设置,可实现清淤过程与垃圾清理过程独立进行,配合作业,从而在垃圾转运过程中不妨碍清淤过程的正常进行,显著提升清淤效率;此外,由于垃圾传送小车行走在清淤设备的后方,暗涵内的路面已经被前方的清淤设备处理得较为平坦,使得配备轮式行走机构40的小车可以快速在暗涵内行走,提高垃圾的转送效率。
32.具体的,请参阅图1所示,淤泥清理机构包括设置于机体10最前端可摆动的铲斗61、与铲斗61一端铰接的第一摆臂62、与第一摆臂62另一端铰接的第二摆臂63,以便于铲斗61能前后摆动,实现刮取功能;淤泥清理机构还包括连接在机体10前端的销轴65,销轴65的另一端通过转接件64与第二摆臂63铰接,以便于摆臂带动铲斗61实现上下左右全方位的灵活摆动。
33.具体的,链条输送机构包括从地面延伸至机体10右上方的传送通道52,设置于传送通道52内的两根链条53以及均匀设置于链条53间的若干片刮板54。其中,两根链条53是沿着传送通道52的延伸方向对称设置的,刮板54的板面垂直于传送通道52的底面或与传送通道52的底面形成一定角度,以便于实现刮取功能,同时,刮板54的设置方向与链条53的环绕方向相垂直。如此设置,当电机带动两根链条53同步沿顺时针方向行进的过程中,位于两根链条53间的若干片刮板54,将不断带动传送通道52前端的淤泥向后方转移,并最终落入设置在清淤设备后方的垃圾传送小车中。
34.具体的,传送通道52的出口端设置有旋转门51,旋转门51可绕设置于旋转门51底边上的门轴55自由旋转,相应的,传送通道52的尾端设置成弧形且开口向下。如此设置,便于通过调节旋转门51的旋转角度,精确调整垃圾落入小车料斗30中的位置,避免堆料问题,提高料斗的容积利用率;同时也减少了小车需要倾倒的次数,进一步提高垃圾的处理效率。
35.请参阅图3所示,在一些实施例中,传送通道52的前端设有喇叭口525。便于全方位
收集暗涵内的垃圾,增大接收面积,提高清淤效率;同时也使铲斗便于铲除清淤设备两侧的垃圾,实现无死角清淤,避免清淤设备行走至离暗涵边较近时易引发刮碰事故的发生。
36.请参阅图1所示,传送通道52的内壁上方分别设置有第一物料传感器521和第二物料传感器522,传送通道52的顶部分别设置有第一监控照明系统523和第二监控照明系统524;其中,第一物料传感器521与第一监控照明系统523均设置于传送通道52的入口端;第二物料传感器522与第二监控照明系统524则设置于传送通道52的出口端。如此设置,一方面便于监控清淤设备入口处和出口处的清淤情况,以便当料斗30内装满垃圾时,能够及时发现并关闭旋转门51;另一方面,也便于监测传送通道52内收集垃圾的高度情况。
37.请参阅图2所示,在一些实施例中,垃圾传送小车的下方底盘31上设置有剪刀撑32和电动缸33,剪刀撑32的上方分离式设置有料斗30,以实现通过电动缸33的伸缩带动剪刀撑32的撑开或折叠,从而控制料斗30的上升或下降。如此设置,剪刀撑32能够把装满垃圾的料斗30升高至洞口边缘,从而方便了工人悬挂吊具,使料斗30的更换过程非常方便,进一步提升了垃圾清理效率。
38.具体的,在一些实施例中,底盘31下方的中部固定设置有动力电池34和应急电池35,动力电池34和应急电池35的外围设置有轮式行走机构40。如此设置,当小车在暗涵内往返运行时动力电池34将提供动力,而当动力电池34无法正常工作时,将由应急电池35为小车提供动力,使小车得以返回洞口,并顺利更换动力电池34。
39.下面对本发明的高效水下清淤机器人100工作原理进行说明:
40.工作模式1:此时,小车正处于清淤设备的后方,旋转门51和驱动链条53转动的电机开启,淤泥清理机构在液压缸的驱动下将暗涵内的垃圾铲到传送通道52内的链条输送机构上,并伴随链条53的顺时针传动,垃圾逐步被刮板54转移至传送通道52的后端,经旋转门51落入垃圾传送小车的料斗30中,由小车快速将垃圾转移至暗涵洞口处,提高清淤效率。在此过程中,通过调整小车的位置或调整旋转门51的旋转角度,能使垃圾均匀分布在小车的每个位置,从而充分利用料斗30的容积,减少小车的往返次数,进一步提升清淤效率。随后,电动缸33伸出,剪刀撑32撑起,料斗30升高至洞口边缘,起重机调走装满垃圾的料斗30,换入空的料斗30。接着,电动缸33收缩,剪刀撑32折叠,料斗30落下,小车重新返回至清淤设备后方。
41.工作模式2:此时,小车正处于往返行进的过程中,可以先关闭旋转门51和驱动链条53转动的电机,此时淤泥清理机构仍可以在液压缸的驱动下将暗涵内的垃圾铲到传送通道52内,当传送通道52入口处的垃圾积累到一定高度以后,被设置在传送通道52入口端的第一物料传感器521检测到,电机将启动,并带动链条53步进运行一段距离,随后再次启动淤泥清理机构,以上过程重复进行,待垃圾传递至被设置在传送通道52出口端的第二物料传感器522检测到时,链条53将停止做后续的步进运行,直至小车重新返回至清淤设备后方,重新启动工作模式1。
42.如此,工作模式1与工作模式2交替运行,充分利用传送通道52的空间,即使在小车往返的过程中,也不影响清淤过程继续进行,实现了清淤与垃圾清理独立进行,提高了清淤效率。
43.综上所述,本发明公开的高效水下清淤机器人100,通过在清淤设备后方设置独立的垃圾传送小车,能够实现在垃圾转运过程中不妨碍清淤过程的正常进行,从而显著提升
清淤效率;通过设置全方位灵活摆动的淤泥清理机构以及与其密切配合前端呈喇叭口525式的链条输送机构,能够一方面有效避免大块垃圾对传统机器人清淤系统的堵塞,提高清淤效率,降低安全隐患和劳动强度;另一方面也使得铲斗61方便铲除清淤设备两侧的垃圾,实现无死角清淤,避免清淤设备离暗涵边较近时易引发刮碰事故的发生;通过在料斗30下方设置剪刀撑32,用于推动装满垃圾的料斗30升高至洞口边缘,从而方便了工人悬挂吊具,使料斗30的更换过程非常方便,进一步提升了垃圾的清理效率;通过在垃圾传送小车下方底盘31上设置两块电池,保证了小车能顺利退回至洞口;此外,通过在传送通道52的末端安装旋转门51,实现了垃圾可以落入料斗30内的不同位置,避免了堆料问题,提高了料斗30的容积利用率,从而减少料斗30的倾倒次数,进一步提升效率。本装置中各部件密切配合,显著提升了清淤效率且实用性极强。
44.以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1