一种水下清淤机器人的制作方法
1.本技术涉及水下清淤的领域,尤其是涉及一种水下清淤机器人。
背景技术:
2.河道淤积己日益影响到防洪、排涝、灌溉、供水、通航等各项功能的正常发挥,为恢复河道正常功能,促进经济社会的快速持续发展,进行河道清淤疏浚工程,使河道通过治理变深、变宽,河水变清,群众的生产条件和居住环境得到明显改善,达到“水清,河畅,岸绿,景美”的目标。而水下清淤机器人是清理水下淤泥的常用设备之一。
3.相关的水下清淤机器人包括车体总成以及安装在车体总成上的清淤装置,清淤装置包括吸泥泵、罩体、绞盘以及驱动电机,罩体上开设有吸口和排泥口,吸泥泵的一端通过管道与罩体的排泥口连通,罩体内安装有用于对污泥进行过滤的格栅板,绞盘转动连接于罩体内,且绞盘位于格栅板靠近吸口的一侧,驱动电机与绞盘连接,用于驱动绞盘转动以使得淤泥破碎。
4.针对上述中的相关技术,发明人认为相关的清淤机器人在清淤过程中,水下的垃圾杂物容易造成格栅板的堵塞,使得清淤机器人的持续清淤时间较短,清理格栅板时需要用吊车协助上岸,导致清淤效率较低。
技术实现要素:
5.为了改善上述问题,本技术提供一种水下清淤机器人。
6.本技术提供的一种水下清淤机器人采用如下的技术方案:一种水下清淤机器人,包括车体总成以及安装在车体总成上的清淤装置,所述清淤装置包括吸泥泵、罩体、绞盘以及驱动电机,所述罩体上开设有吸口和排泥口,所述吸泥泵通过排泥口与罩体内部连通,所述罩体内安装有格栅板,所述绞盘转动连接在罩体内,所述驱动电机安装在罩体内,所述驱动电机的输出端连接有连接轴,所述连接轴与绞盘连接,用以带动绞盘转动;所述罩体内设置有防堵机构,所述防堵机构包括转轴以及设置在转轴上的若干第一刷毛,所述转轴与连接轴连接,且所述转轴位于格栅板的一侧,所述转轴通过第一刷毛与格栅板抵接。
7.通过采用上述技术方案,当罩体紧贴河底的污泥时,驱动电机通过连接轴带动绞盘转动,对罩体内的淤泥进行搅动,使得淤泥破碎的更加细碎并与罩体内的水体混合在一起,并在吸泥泵的抽吸作用下,将淤泥从排泥口抽出,对水下淤泥进行清理。而在此过程中,驱动电机通过连接轴带动转轴转动,转轴上的第一刷毛不断刮扫格栅板,从而对格栅板起到清理作用,降低格栅板被污泥杂物堵塞的可能性,延长清淤机器人的连续清淤时间,进而提高清淤效率。
8.可选的,所述防堵机构还包括第一齿圈以及第一传动齿轮,所述转轴的一端与连接轴转动连接,所述转轴的另一端与第一传动齿轮固定连接,所述第一齿圈安装在罩体内,所述第一齿圈的周侧形成有若干第一齿牙,所述第一齿圈通过第一齿牙与第一传动齿轮啮
合。
9.通过采用上述技术方案,驱动电机通过连接轴带动转轴转动的过程中,转轴通过第一传动齿轮与第一齿圈的第一齿牙啮合,继而第一齿圈通过第一传动齿轮带动转轴转动,从而转轴在绕连接轴轴线转动的同时,并不断绕自身的轴线自转,继而转轴带动第一刷毛不断转动,从而进一步提高对格栅板的清理效果。
10.可选的,所述转轴以及第一齿圈均位于格栅板靠近吸口的一侧。
11.通过采用上述技术方案,当转轴通过第一刷毛在对格栅板进行清理时,第一刷毛对于格栅板靠近吸口一侧的区域内淤泥起到搅动破碎效果,从而提高对于罩内淤泥的抽吸效果。
12.可选的,所述防堵机构还包括第二齿圈,所述第二齿圈与罩体转动连接,所述第二齿圈位于第一传动齿轮远离第一齿圈的一侧,所述第二齿圈的周侧形成有若干第二齿牙,所述第二齿圈通过第二齿牙与第一传动齿轮啮合,所述第二齿圈上连接有绞泥杆。
13.通过采用上述技术方案,第一传动齿轮啮合于第一齿圈和第二齿圈之间,第一传动齿轮在转轴的带动下,绕连接轴的轴线转动;继而第一传动齿轮在第一齿圈的第一齿牙啮合作用下进行转动,继而第一传动齿轮通过第二齿牙带动第二齿圈转动,第二齿圈带动绞泥杆转动,对吸口处的淤泥搅动的效果,使得淤泥被打散,使得淤泥罩内淤泥更容易被抽吸排出,提高清淤效果。
14.可选的,所述第二齿圈远离第二齿牙的一侧形成有若干第三齿牙,所述罩体内壁转动连接有若干第二传动齿轮,所述第二传动齿轮位于第二齿圈远离第一传动齿轮的一侧,所述第二齿圈通过第三齿牙与第二传动齿轮啮合,所述绞泥杆与第二传动齿轮连接。
15.通过采用上述技术方案,第一传动齿轮通过第二齿牙带动第二齿圈转动的过程中,第二齿圈通过第三齿牙与第二传动齿轮啮合,继而第二齿圈带动第二传动齿轮转动,第二传动齿轮带动绞泥杆转动,从而对吸口周侧的进行搅动破碎,保障清淤效果。
16.可选的,所述绞泥杆连接于第二传动齿轮远离罩体的一侧,所述绞泥杆相较于第二传动齿轮的中心呈偏心设置。
17.通过采用上述技术方案,绞泥杆相较于第二传动齿轮的中心呈偏心设置,提高绞泥杆的搅动范围及对于淤泥的搅动效果,对于吸口周侧的淤泥具有良好的搅动破碎效果。
18.可选的,所述第一齿圈和第二齿圈之间形成有供第一传动齿轮移动的传动通道,所述转轴上设置有刷盘,所述刷盘上设置有若干用于对传动通道进行清扫的第二刷毛。
19.通过采用上述技术方案,第一传动齿轮在连接轴的带动下,在传动通道内移动时,刷盘随着第一传动齿轮同步移动,且转轴带动刷盘转动,继而刷盘带动第二刷毛转动,第二刷毛对进入到传动通道内的淤泥杂物等进行清扫,继而保障第一传动齿轮在传动通道内啮合移动时的稳定性和顺畅性。
20.可选的,所述罩体内连接有隔板,所述隔板位于格栅板远离吸口的一侧,所述隔板上开设有若干流通口,所述吸口和排泥口分别位于隔板的两侧。
21.通过采用上述技术方案,隔板的设置,一方面增加了罩体整体的强度,另一个方面在流通口的开设下,减少了泥浆泵的作用面积,提高了泥浆泵的吸淤压强,进而提高了清淤效率。
22.可选的,所述绞盘包括连接套筒以及设置于连接套筒周侧的若干铰刀,所述铰刀
沿连接套筒的长度方向设置有多层,所述驱动电机安装在隔板上,所述连接轴的一端穿出格栅板并与连接套筒连接。
23.通过采用上述技术方案,多层的绞刀提高了与淤泥中杂质的接触频率,使得淤泥更容易通过格栅,另一方面多层的绞刀也使得淤泥与水体扰动混合的效率更高,提高了吸淤效率。
24.可选的,所述罩体的吸口的边缘设置为锯齿状。
25.通过采用上述技术方案,罩体吸口的边缘设置为锯齿状,使得罩体贴靠淤泥时,作用的更深,作用范围更大;当绞盘转动时,会带动罩体外部的水体从吸口锯齿缝隙进入到罩体内部,另一方面,水流流动的冲击力也能够加快淤泥脱离河道底部的效率,使得清淤效果更好。
26.综上所述,本技术包括以下至少一种有益技术效果:1.通过设置防堵机构,驱动电机通过连接轴带动转轴转动,转轴上的第一刷毛不断刮扫格栅板,从而对格栅板起到清理作用,降低格栅板被污泥杂物堵塞的可能性,延长清淤机器人的连续清淤时间,进而提高清淤效率;2.通过设置第二齿圈和绞泥杆,第一传动齿轮通过第二齿牙带动第二齿圈转动,第二齿圈带动绞泥杆转动,对吸口处的淤泥搅动的效果,使得淤泥被打散,使得淤泥罩内淤泥更容易被抽吸排出,提高清淤效果;3.通过设置刷盘,对进入到传动通道内的淤泥杂物等进行清扫,继而保障第一传动齿轮在传动通道内啮合移动时的稳定性和顺畅性。
附图说明
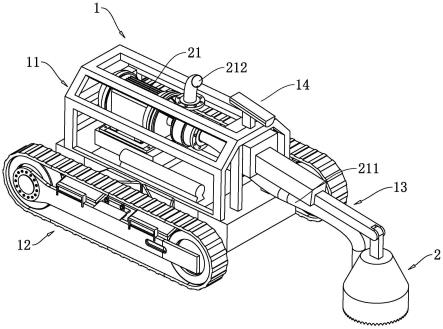
27.图1是本技术实施例一种水下清淤机器人的整体结构示意图。
28.图2是本技术实施例用于体现罩体内部结构的局部剖视图。
29.图3是本技术实施例用于体现防堵机构的局部结构示意图。
30.图4是本技术实施例用于体现防堵机构的局部结构侧视图。
31.附图标记说明:1、车体总成;11、车架主体;12、履带式底盘;13、机械臂;14、视觉探测机构;2、清淤装置;21、吸泥泵;211、吸泥管;212、排泥管;22、罩体;221、吸口;222、排泥口;23、格栅板;24、绞盘;241、连接套筒;242、铰刀;25、驱动电机;251、连接轴;26、隔板;261、流通口;3、防堵机构;31、转轴;32、第一传动齿轮;33、第一刷毛;34、第一齿圈;341、第一齿牙;35、第二齿圈;351、第二齿牙;352、第三齿牙;36、第二传动齿轮;361、绞泥杆;37、刷盘;38、第二刷毛;39、传动通道。
具体实施方式
32.以下结合附图1-4对本技术作进一步详细说明。
33.本技术实施例公开一种水下清淤机器人。参照图1,一种水下清淤机器人包括车体总成1以及安装在车体总成1上的清淤装置2,车体总成1包括车架主体11、履带式底盘12、视觉探测机构14和控制集成单元,车架主体11安装在履带式底盘12上,履带式底盘12用于带动车架主体11移动,视觉探测机构14、集成控制单元以及清淤装置2均安装在车架主体11上,清淤装置2、视觉探测机构14以及履带式底盘12均与集成控制单元连接,视觉探测机构
14用于收集水下环境视觉信息,工作人员通过视觉探测机构14提供的视野信息,只需在岸上操纵清淤机器人;清淤装置2用于对水下的淤泥进行抽吸排出,以达到清淤的目标。
34.参照图1和图2,清淤装置2包括吸泥泵21、罩体22、绞盘24以及驱动电机25;罩体22整体呈圆台状,罩体22的内部形成有空腔,罩体22的顶部连接有机械臂13,罩体22通过机械臂13与车架主体11连接;罩体22的下底面开设有与内部空腔相连通且用于抽吸淤泥的吸口221,罩体22的侧壁上开设有与排泥口222。吸泥泵21通过螺栓固定在车架主体11上,吸泥泵21上连接有吸泥管211和排泥管212,吸泥管211远离吸泥泵21的一端与罩体22的排泥口222连接。
35.参照图2和图3,罩体22内设置有隔板26,隔板26与罩体22的轴线垂直设置,隔板26的边沿与罩体22的内壁焊接固定,起到增加罩体22强度的效果,并将罩体22内部分隔呈两个区域;排泥口222和吸口221分别位于隔板26的两侧,隔板26上均匀开设有若干流通口261,流通口261的开设相较于吸口221,减小了吸泥泵21的作用面积,继而加快污泥通过流通口261的速度,使得污泥的流通更加顺利,提高清淤效果。罩体22的吸口221的边缘呈锯齿状,一方面当罩体22贴靠河道的底部时,在相同的作用力下,罩体22吸口221的边沿更容易插入进淤泥中;另一方面当吸泥泵21工作时,罩体22的污泥会向罩体22排泥口222的方向流动,而罩体22的吸口221边沿会流出空隙,带动罩体22外部的水体高速向罩体22内部流动,水体进入罩体22内的过程中,也会对淤泥起到了搅动的作用,使得淤泥更加的散落,进而提高了清淤效率。
36.参照图2和图3,隔板26靠近吸口221的一侧设有格栅板23,格栅板23与罩体22轴线垂直,且格栅板23的周沿与罩体22焊接固定。格栅板23用于对淤泥中的石块、杂物等起到拦截作用,保障清淤作业的稳定性。驱动电机25通过螺栓固定在隔板26远离格栅板23的一面的中部,驱动电机25的输出轴同轴固定有连接轴251,连接轴251穿过隔板26以及格栅板23,并与绞盘24连接;驱动电机25用于驱动绞盘24转动,对水下的淤泥进行破碎,使得淤泥与水体混合,便于抽吸排出。
37.参照图2和图3,绞盘24包括连接套筒241以及若干铰刀242,连接套筒241同轴固接于连接轴251穿出格栅板23的一端,铰刀242焊接固定在连接套筒241的周面,本实施例中,若干铰刀242沿连接套筒241的轴向排列有两层,每层铰刀242设置有五个,并且两层铰刀242交错排列,以使得绞盘24在旋转工作时能够与淤泥中的杂质充分接触。
38.参照图2和图3,由于清淤机器人在清淤过程中,水下的垃圾杂物容易造成格栅板23的堵塞,使得清淤机器人的持续清淤时间较短,清理格栅板23时需要用吊车协助上岸,导致清淤效率较低,因此,在罩体22内还设置有防堵机构3。防堵机构3包括转轴31以及粘接固定在转轴31上的若干第一刷毛33,转轴31位于格栅板23靠近吸口221的一侧,转轴31的一端与连接轴251连接,转轴31的轴线与连接轴251的轴线相垂直,第一刷毛33与格栅板23抵触。驱动电机25通过连接轴251带动绞盘24转动时,连接轴251带动转轴31同步转动,继而连接轴251带动第一刷毛33不断刮扫格栅板23,从而对格栅板23起到清理作用,降低格栅板23被污泥杂物堵塞的可能性,延长清淤机器人的连续清淤时间,进而提高清淤效率。
39.参照图2和图4,转轴31的一端穿设在连接轴251内且与连接轴251转动连接,转轴31的另一端同轴固定有第一传动齿轮32。罩体22内同轴设置有第一齿圈34,第一齿圈34与壳体的内壁焊接固定,第一齿圈34位于格栅板23靠近吸口221的一侧,第一齿圈34远离格栅
板23的外壁周沿一体成型有与第一传动齿轮32相啮合的若干第一齿牙341。当驱动电机25通过连接轴251带动转轴31转动时,转轴31通过第一传动齿轮32与第一齿圈34的第一齿牙341啮合,继而第一齿圈34通过第一传动齿轮32带动转轴31转动,从而转轴31在绕连接轴251轴线转动的同时,并不断绕自身的轴线自转,继而转轴31带动第一刷毛33不断转动,从而进一步提高对格栅板23的清理效果,且第一刷毛33对于格栅板23靠近吸口221一侧的区域内的淤泥起到搅动破碎效果,从而提高对于罩体22内淤泥的清淤效果。
40.参照图2和图4,罩体22内还同轴设置有第二齿圈35,第二齿圈35与罩体22转动连接,第二齿圈35位于第一齿圈34远离格栅板23的一侧,第一传动齿轮32位于第一齿圈34和第二齿圈35之间;第二齿圈35靠近第一传动齿轮32的外壁周沿形成有若干第二齿牙351,第二齿圈35通过第二齿牙351与第一传动齿轮32啮合。罩体22的内壁转动连接有若干第二传动齿轮36,第二传动齿轮36位于第二齿圈35远离第一传动齿轮32的一侧,若干第二传动齿轮36沿罩体22的周向均匀排布,第二齿圈35靠近第二传动齿轮36的外壁周沿一体成型有若干第三齿牙352,第二齿圈35通过第三齿牙352与第二传动齿轮36啮合。第二传动齿轮36远离罩体22的一面上焊接固定有绞泥杆361,绞泥杆361相对于第二传动齿轮36的中心呈偏心设置。
41.参照图2和图4,第一齿圈34通过第一齿牙341带动第一传动齿轮32转动的过程中,第一传动齿轮32通过与第二齿牙351的啮合作用带动第二齿圈35转动,第二齿圈35通过第三齿牙352带动第二传动齿轮36转动,第二传动齿轮36带动绞泥杆361进行偏心转动,从而对罩体22吸口221周侧的淤泥进行搅动破碎,以提高清淤效果;而绞泥杆361偏心设置,提高绞泥杆361的搅动范围和对淤泥的搅动效果。
42.参照图3和图4,第一传动齿轮32啮合于第一齿圈34和第二齿圈35之间,第一齿圈34和第二齿圈35之间形成有供第一传动齿轮32移动的传动通道39,第一传动齿轮32的一侧设置有刷盘37,刷盘37套设在转轴31外且与转轴31焊接固定,刷盘37朝向第一传动齿轮32的一面的周侧粘接固定有若干第二刷毛38,第二刷毛38与传动通道39抵触。第一传动齿轮32在连接轴251的带动下,在传动通道39内移动时,刷盘37随着第一传动齿轮32同步移动,且转轴31带动刷盘37转动,继而刷盘37带动第二刷毛38转动,第二刷毛38对进入到传动通道39内的淤泥杂物等进行清扫,继而保障第一传动齿轮32在传动通道39内啮合移动时的稳定性和顺畅性。
43.本技术实施例一种水下清淤机器人的实施原理为:车体总成1控制罩体22罩设在水下淤泥上,驱动电机25通过连接轴251带动绞盘24转动,绞盘24对淤泥进行打散;之后,吸泥泵21启动,吸泥泵21将罩体22内的淤泥抽吸排出。驱动电机25驱动绞盘24转动的过程中,连接轴251带动转轴31同步转动,且第一齿圈34通过第一传动齿轮32带动连接轴251自转,继而连接轴251带动第一刷毛33不断刮扫格栅板23,从而对格栅板23起到清理作用,降低格栅板23被污泥杂物堵塞的可能性,延长清淤机器人的连续清淤时间,提高清淤效率。
44.第一传动齿轮32在连接轴251的带动下,在传动通道39内移动时,刷盘37随着第一传动齿轮32同步移动,且转轴31带动刷盘37转动,继而刷盘37带动第二刷毛38转动,第二刷毛38对进入到传动通道39内的淤泥杂物等进行清扫,继而保障第一传动齿轮32在传动通道39内啮合移动时的稳定性和顺畅性。且第一传动齿轮32带动第二齿圈35转动,第二齿圈35带动第二传动齿轮36转动,第二传动齿轮36带动绞泥杆361进行偏心转动,从而对罩体22吸
口221周侧的淤泥进行搅动破碎,以提高清淤效果。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1