夯锤和绳体运动参数为质量控制的孔内深层强夯法及系统的制作方法
1.本发明涉及地基施工技术领域,尤其涉及一种夯锤和绳体运动参数为质量控制的孔内深层强夯法及系统。
背景技术:
2.孔内深层强夯法是一种先预成孔,成孔后在孔内填料或分层填料强夯的方法,随着技术的专用设备的改进,孔内深层强夯法在施工的过程中,会出现受到成孔过程中天然地基的影响,当天然地基土质松软,在成孔过程中容易发生垮塌的情况,或者在成孔后地基含水量大,特别是在江、河、湖、海边,受到地下水的影响,出现严重的水渗入的问题。当孔内进行填料后,不管是孔壁垮塌的问题还是地下水渗入的问题,都会引起孔壁有严重的收缩或孔底无法达到预定成孔深度的不良结果。但是由于孔内深层强夯法属于地基处理工程,工程为地下隐蔽工程,施工人员往往从地面无法看到孔内的情况,这样可能会出现严重的质量隐患,地面作业的施工人员往往认为地下的桩体已经被夯实了,但是由于孔壁和孔底的上述结果,导致夯锤和绳体无法有效强夯孔底填料,最终导致工程质量不合格。因此为了避免这样的问题发生,把原先人为视觉察看方法改为机械传感器和控制器判断结果,以进一步通过人工、机械方式判断孔内深层强夯的质量是否合格。
技术实现要素:
3.本发明提供一种夯锤和绳体运动参数为质量控制的孔内深层强夯法及系统,用以解决现有技术中无法判断一轮孔内深层强夯的质量是否合格的技术问题,实现孔内深层强夯质量的准确判断。
4.本发明提供一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,包括:
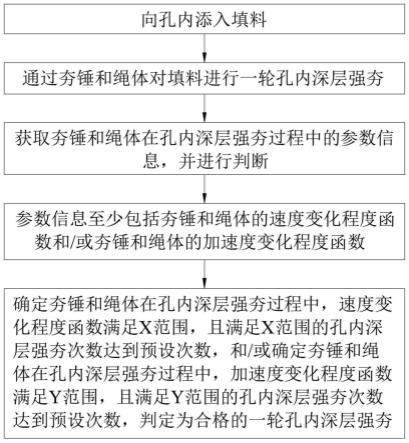
5.向孔内填入填料,并通过夯锤和绳体对所述填料进行一轮孔内深层强夯;
6.获取所述夯锤和绳体在孔内深层强夯过程中的参数信息,并进行判断;
7.其中,所述参数信息至少包括所述夯锤和绳体的速度变化程度函数和/或所述夯锤和绳体的加速度变化程度函数;
8.确定所述夯锤和绳体在孔内深层强夯过程中,所述速度变化程度函数满足x范围,且满足所述x范围的孔内深层强夯次数达到预设次数,和/或确定所述夯锤和绳体在孔内深层强夯过程中,所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
9.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,还包括:卷扬机,所述卷扬机通过所述绳体与所述夯锤和绳体相连。
10.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述确定所述夯锤和绳体在孔内深层强夯过程中,所述速度变化程度函数满足x范围,且满足所述x范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯的步骤,具体包括:
11.在一轮孔内深层强夯前,预设夯锤和绳体下落路程数值或范围后,在一轮孔内深层强夯过程中获取所述夯锤和绳体的下落加速度,根据所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落加速度,获得所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落加速度之间的所述夯锤和绳体的速度变化程度函数,确定所述夯锤和绳体的速度变化程度函数满足x范围,且满足所述x范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
12.根据本发明提供一种的夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述夯锤和绳体的下落路程数值或范围包括所述夯锤和绳体在作业面以上的下落高度与所述夯锤和绳体在孔内的下落深度数值或范围的总和;
13.当所述夯锤和绳体的下落初始位置位于孔内,所述夯锤和绳体的下落路程数值或范围为孔内下落深度数值或范围。
14.根据本发明提供一种的夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述夯锤和绳体的下落路程对应于所述卷扬机释放的绳体的放绳量,所述夯锤和绳体的下落加速度对应于所述卷扬机释放绳体的放绳加速度;
15.所述卷扬机至所述夯锤两端及绳体之间或周边范围内,设有位移传感器/编码器和加速度传感器/编码器,所述位移传感器/编码器用于监测所述卷扬机释放绳体的放绳量,所述加速度传感器/编码器用于监测所述卷扬机释放绳体的放绳加速度,基于所述卷扬机释放绳体的放绳量和所述卷扬机释放绳体的放绳加速度,获取所述速度变化程度函数。
16.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述x范围的获取步骤,具体包括:
17.获取施工区域的重力加速度,根据所述夯锤和绳体的下落路程数值或范围,根据地勘报告的地质条件设定系数n,所述重力加速度乘以系数n,来确定所述x范围;
18.其中,所述地质条件包括土实密度或土性质、地下水位及含水量,n≥0.81;
19.其中,所述夯锤和绳体的下落路程数值或范围为所述卷扬机释放绳体的放绳量,所述卷扬机释放绳体的放绳量包括所述夯锤下落至所述孔内填入填料表面时所述卷扬机的放绳量和所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量。
20.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述确定所述夯锤和绳体在孔内深层强夯过程中,所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯的步骤,具体包括:
21.在一轮孔内深层强夯前,预设夯锤和绳体下落路程数值或范围后,在一轮孔内深层强夯过程中获取所述夯锤和绳体的下落速度,根据所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落速度,获得所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落速度之间的所述夯锤和绳体的加速度变化程度函数,确定所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
22.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述夯锤和绳体的下落路程数值或范围包括所述夯锤和绳体在作业面以上的下落高度与所述夯锤和绳体在孔内的下落深度数值或范围的总和;
23.当所述夯锤和绳体的下落初始位置位于孔内,所述夯锤和绳体的下落路程数值或范围为孔内下落深度数值或范围。
24.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述卷扬机至所述夯锤两端及绳体之间或周边范围内,设有速度传感器/编码器和位移传感器/编码器,所述速度传感器/编码器用于监测所述卷扬机释放绳体的放绳速度,所述位移传感器/编码器用于监测所述夯锤和绳体的下落路程数值或范围;
25.所述卷扬机释放绳体的放绳速度对应于所述夯锤和绳体的下落速度;
26.基于所述夯锤和绳体的下落速度,根据所述夯锤和绳体的下落路程数值或范围,获取所述加速度变化程度函数,确定所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
27.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述y范围的获取步骤,具体包括:
28.获取所述夯锤和绳体的下落速度,根据所述夯锤和绳体的下落路程数值或范围,根据地勘报告的地质条件设定系数n,所述下落速度乘以系数n,来确定所述y范围;
29.其中,所述地质条件包括土实密度或土性质、地下水位及含水量,n≥0.81;
30.其中,所述夯锤和绳体的下落路程数值或范围为所述卷扬机释放绳体的放绳量,所述卷扬机释放绳体的放绳量包括所述夯锤下落至所述孔内填入填料表面时所述卷扬机的放绳量和所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量。
31.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述参数信息还包括所述夯锤和绳体的夯击程度函数;
32.确定所述夯锤和绳体在孔内深层强夯过程中,所述夯击程度函数满足z范围,且满足所述z范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
33.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述确定所述夯锤和绳体在孔内深层强夯过程中,所述夯击程度函数满足z范围,且满足所述z范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯的步骤,具体包括:
34.在一轮孔内深层强夯前,设定所述夯锤的重量或所述夯锤和绳体的总重量,在一轮孔内深层强夯中,获取所述x范围和/或y范围,以确认所述夯锤和绳体的下落速度数值或范围,获取所述夯锤从下落至静止状态或所述夯锤从下落至最低运动状态期间,所述夯锤和绳体对所述填料的夯击力;
35.基于所述夯锤和绳体对所述填料的夯击力,所述夯锤下落至所述孔内填入填料表面前的最大夯击力为f
max
,所述夯锤进入所述孔内填入填料处于静止状态或最低运动状态的夯击力为f
min
,确定夯击力由所述f
max
至所述f
min
期间对应的变化时间t,从而获取所述夯击程度函数,确定所述夯击程度函数满足z范围,且满足所述z范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯;
36.其中,所述f
min
为0或为最低夯击力预设值。
37.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述夯锤和绳体对所述填料的夯击力对应于所述卷扬机释放夯锤和绳体的拉力;
38.所述卷扬机至所述夯锤两端及绳体之间或周边范围内,设有拉力传感器/编码器,
所述拉力传感器/编码器用于监测所述卷扬机释放夯锤和绳体的拉力,且测量所述夯锤和绳体下落至静止状态或最低运动状态期间从从所述f
max
至所述f
min
变化的时间t,并给所述卷扬机通过所述绳体上拉所述夯锤和绳体的信号,以确保孔内深层强夯过程中充分释放对孔内填料的作用力;
39.基于所述卷扬机释放夯锤和绳体的拉力从f
max
至f
min
期间的时间t变化,获得所述夯击程度函数。
40.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯法,所述z范围的获取步骤,具体包括:
41.获取所述夯锤和绳体的锤重、所述夯锤和绳体的下落速度以及所述夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
的下落路程数值或范围;
42.根据所述夯锤和绳体的锤重、所述夯锤和绳体的下落速度以及所述夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
的下落路程数值或范围,来确定夯击程度数值或范围,根据地勘报告的地质条件设定系数n,所述夯击程度数值或范围乘以系数n,来确定所述z范围;
43.其中,所述地质条件包括土实密度或土性质、地下水位及含水量,n≥0.81;
44.其中,所述夯锤和绳体的下落路程数值或范围为所述卷扬机释放绳体的放绳量,所述卷扬机释放绳体的放绳量包括所述夯锤下落至所述孔内填入填料表面时所述卷扬机的放绳量和所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量;
45.所述夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
的下落路程为所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量的数值或范围。
46.本发明还提供一种夯锤和绳体运动参数为质量控制的孔内深层强夯系统,包括:
47.测量单元,设置于卷扬机至所述夯锤两端及绳体之间或周边范围内,用于采集孔内深层强夯过程中所述夯锤和绳体的运动参数信息;
48.计算单元,与所述测量单元信号连接,用于接收所述所述夯锤和绳体的运动参数信息,并计算所述夯锤和绳体的运动参数;
49.比较单元,与所述计算单元信号连接,用于接收夯锤和绳体的运动参数,并将孔内深层强夯过程中所述夯锤和绳体的运动参数与设定值进行比较,并发出比较信号;
50.提示单元,与所述比较单元信号连接,用于接收所述比较信号,在所述夯锤和绳体的运动参数不属于设定值时,所述提示单元产生提示音。
51.根据本发明提供的一种夯锤和绳体运动参数为质量控制的孔内深层强夯系统,所述计算单元和所述比较单元集成于plc控制器,基于plc闭环控制,将所采集到的运动参数信息进行计算后再发出比较信号。
52.本发明实施例提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法及系统,通过利用夯锤和绳体对孔内的填料进行孔内深层强夯,在孔内深层强夯的过程中,夯锤和绳体在重力作用下进行自由落体运动,夯锤和绳体自由落体运动至与填料接触的过程中,会有各种孔内深层强夯参数信息,其中参数信息至少包括夯锤和绳体的速度变化程度函数和/或所述夯锤和绳体的加速度变化程度函数,将速度变化程度函数与x范围进行对比,当速度变化程度函数满足x范围时,且满足x范围的孔内深层强夯次数达到预设次数,判定为合格的一轮孔内深层强夯,和/或将加速度变化程度函数与y范围进行对比,当加速度变化
程度函数满足y范围时,且满足y范围的孔内深层强夯次数达到预设次数,判定为合格的一轮孔内深层强夯,利用上述方式可以很好的对孔内深层强夯的质量进行把控,避免出现过夯现象造成施工效率降低,同时也能避免出现欠夯现象而使孔内形成的桩体不能达到设计要求,保证了施工质量、缩短了施工周期、提高了施工效率。
附图说明
53.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
54.图1是本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法的流程示意图之一;
55.图2是本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法的流程示意图之二;
56.图3是本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法中,土质的地勘剖面示意图之一;
57.图4是本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法中,土质的地勘剖面示意图之二;
58.图5是本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法中,土质的地勘剖面示意图之三;
59.图6是本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法中,土质的地勘剖面示意图之四。
具体实施方式
60.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
61.在本发明实施例的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明实施例的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
62.在本发明实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明实施例中的具体含义。
63.在本发明实施例中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或
仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
64.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明实施例的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
65.下面结合图1-图2描述本发明的夯锤和绳体运动参数为质量控制的孔内深层强夯法及系统,该孔内深层强夯法包括:
66.向孔内填入填料,并通过夯锤和绳体对所述填料进行一轮孔内深层强夯;
67.获取所述夯锤和绳体在孔内深层强夯过程中的参数信息,并进行判断;
68.其中,所述参数信息至少包括所述夯锤和绳体的速度变化程度函数和/或所述夯锤和绳体的加速度变化程度函数;
69.确定所述夯锤和绳体在孔内深层强夯过程中,所述速度变化程度函数满足x范围,且满足所述x范围的孔内深层强夯次数达到预设次数,和/或确定所述夯锤和绳体在孔内深层强夯过程中,所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
70.通过利用夯锤和绳体对孔内的填料进行孔内深层强夯,在孔内深层强夯的过程中,夯锤和绳体在重力作用下进行自由落体运动,夯锤和绳体自由落体运动至与填料接触的过程中,会有各种孔内深层强夯参数信息,其中参数信息至少包括夯锤和绳体的速度变化程度函数和/或所述夯锤和绳体的加速度变化程度函数,将速度变化程度函数与x范围进行对比,当速度变化程度函数满足x范围时,且满足x范围的孔内深层强夯次数达到预设次数,判定为合格的一轮孔内深层强夯,和/或将加速度变化程度函数与y范围进行对比,当加速度变化程度函数满足y范围时,且满足y范围的孔内深层强夯次数达到预设次数,判定为合格的一轮孔内深层强夯,利用上述方式可以很好的对孔内深层强夯的质量进行把控,避免出现过夯现象造成施工效率降低,同时也能避免出现欠夯现象而使孔内形成的桩体不能达到设计要求,保证了施工质量、缩短了施工周期、提高了施工效率。。
71.其中,该孔内深层强夯法中,还需先在施工区域开孔,根据设计要求控制开孔的深度和孔径,然后再向孔内填入填料。夯锤和绳体的下落高度范围为4~60m(米)。
72.根据本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法,夯锤通过绳体连接有卷扬机,也即卷扬机作为夯锤和绳体的动力来源,卷扬机通过绳体与夯锤和绳体的上端相连。其中,绳体可以采用钢丝绳、高强度纤维绳、铁链或钢链等,只需保证在夯锤和绳体下落和夯锤和绳体提升的过程中绳体不易发生弯曲和变形即可。在夯锤和绳体下落过程中,绳体始终保持与夯锤和绳体相连。其中,在卷扬机上安装有支架和稳定装置,利用稳定装置可以使各传感器能稳定、精确的传输所需的信息,在绳体提升的最高顶端处可以安装有滑轮,绳体的一端与夯锤和绳体的上端相连,绳体的另一端绕过滑轮后与卷扬机的
提升机构相连。
73.在夯锤和绳体进行自由落体运动时,夯锤和绳体的起始高度可以位于孔内或孔外,根据不同的设计要求的成孔深度不同,可以选择夯锤和绳体的起始下落点。夯锤和绳体的下落路程数值或范围包括夯锤和绳体在作业面以上的下落高度数值或范围与夯锤和绳体在孔内的下落深度数值或范围的总和,当夯锤和绳体的初始高度位于孔内,夯锤和绳体的下落路程数值或范围为孔内下落深度数值或范围。
74.确定夯锤和绳体在孔内深层强夯过程中,速度变化程度函数满足x范围,且满足x范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯的步骤,具体包括:
75.在一轮孔内深层强夯前,预设夯锤和绳体下落路程数值或范围后,在一轮孔内深层强夯过程中获取所述夯锤和绳体的下落加速度,根据所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落加速度,获得所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落加速度之间的所述夯锤和绳体的速度变化程度函数,确定所述夯锤和绳体的速度变化程度函数满足x范围,且满足所述x范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
76.所述夯锤和绳体的下落路程对应于所述卷扬机释放的绳体的放绳量,所述夯锤和绳体的下落加速度对应于所述卷扬机释放绳体的放绳加速度;所述卷扬机至所述夯锤两端及绳体之间或周边范围内,例如以所述绳体为圆柱中心线五米范围内,设有位移传感器/编码器和加速度传感器/编码器,所述位移传感器/编码器用于监测所述卷扬机释放绳体的放绳量,所述加速度传感器/编码器用于监测所述卷扬机释放绳体的放绳加速度,基于所述卷扬机释放绳体的放绳量和所述卷扬机释放绳体的放绳加速度,获取所述速度变化程度函数。
77.x范围的获取步骤,具体包括:获取施工区域的重力加速度,根据所述夯锤和绳体的下落路程数值或范围,根据地勘报告的地质条件设定系数n,所述重力加速度乘以系数n,来确定x范围。
78.其中,所述地质条件包括土实密度或土性质、地下水位及含水量,n≥0.81。
79.其中,所述夯锤和绳体的下落路程数值或范围为所述卷扬机释放绳体的放绳量,所述卷扬机释放绳体的放绳量包括所述夯锤下落至所述孔内填入填料表面时所述卷扬机的放绳量和所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量。
80.由于夯锤和绳体在自由落体运动的过程中时刻与绳体相连,那么夯锤和绳体的下落加速度对应于卷扬机释放绳体的放绳加速度。当绳体仅通过定滑轮导向后连接夯锤和绳体和卷扬机时,夯锤和绳体的下落加速度与绳体的放绳加速度一致;若绳体上有动滑轮等机构,则夯锤和绳体的下落加速度与绳体的放绳加速度需按比例进行折算。
81.由于土实密度或土性质、地下水位及含水量等不良因素的影响,夯锤和绳体实际的下落加速度不能达到当地重力加速度g的数值,根据能量耗损的折算,x范围为大于等于0.81g,在部分区域可以取值0.9g或0.95g。也就是当所监测到的加速度数值能时刻达到0.81g、0.9g或0.95g时,便判定为合格的一轮孔内深层强夯。
82.具体的,x范围为8.2~34.3m/s(米每秒),根据不同施工区域,选择不同的数值。根据不同的孔深度和重力加速度,选择不同的数值,当所监测到的绳体的放绳速度达到这一
范围的某一数值时,判定为合格的孔内深层强夯。
83.根据本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法及系统,所述确定所述夯锤和绳体在孔内深层强夯过程中,所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯的步骤,具体包括:
84.在一轮孔内深层强夯前,预设夯锤和绳体下落路程数值或范围后,在一轮孔内深层强夯过程中获取所述夯锤和绳体的下落速度,根据所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落速度,获得所述夯锤和绳体的下落路程数值或范围和所述夯锤和绳体的下落速度之间的所述夯锤和绳体的加速度变化程度函数,确定所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
85.其中,所述夯锤和绳体的下落路程数值或范围包括所述夯锤和绳体在作业面以上的下落高度与所述夯锤和绳体在孔内的下落深度数值或范围的总和。
86.当所述夯锤和绳体的下落初始位置位于孔内,所述夯锤和绳体的下落路程为孔内下落深度数值或范围。
87.在夯锤和绳体进行自由落体运动的过程中,夯锤和绳体的速度会在重力加速度的作用下进行变化,而由于阻力或外因干扰,会使夯锤和绳体的速度变化程度函数各不相同,基于夯锤和绳体的下落速度和获得所述夯锤和绳体的下落路程数值或范围可以获取当次孔内深层强夯过程中夯锤和绳体的加速度变化程度函数,基于加速度变化程度函数与y范围进行比较,当加速度变化程度函数的数值大于等于y范围时,且满足y范围的孔内深层强夯次数达到预设次数,判定为合格的一轮孔内深层强夯。
88.所述卷扬机至所述夯锤两端及绳体之间或周边范围内,例如以所述绳体为圆柱中心线五米范围内,设有速度传感器/编码器和位移传感器/编码器,所述速度传感器/编码器用于监测所述卷扬机释放绳体的放绳速度,所述位移传感器/编码器用于监测所述夯锤和绳体的下落路程数值或范围;
89.所述卷扬机释放绳体的放绳速度对应于所述夯锤和绳体的下落速度;
90.基于所述夯锤和绳体的下落速度,根据所述夯锤和绳体的下落路程数值或范围,获取所述加速度变化程度函数,确定所述加速度变化程度函数满足y范围,且满足所述y范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
91.y范围的获取步骤,具体包括:获取所述夯锤和绳体的下落速度,根据所述夯锤和绳体的下落路程数值或范围,根据地勘报告的地质条件设定系数n,所述下落速度乘以系数n,来确定所述y范围;
92.其中,所述地质条件包括土实密度或土性质、地下水位及含水量,n≥0.81;
93.其中,所述夯锤和绳体的下落路程数值或范围为所述卷扬机释放绳体的放绳量,所述卷扬机释放绳体的放绳量包括所述夯锤下落至所述孔内填入填料表面时所述卷扬机的放绳量和所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量。
94.具体的,根据经典物理的自由落体速度计算公式可知:
95.v2=2gh;即
96.基于施工区域的重力加速度和夯锤和绳体的下落路程,便可计算得出夯锤和绳体
理论上能达到的最大下落速度。而由于土实密度或土性质、地下水位及含水量等不良因素的影响,夯锤和绳体实际的下落最大速度难以达到理论上的最大下落速度,因此,所确定的x范围为所求的理论速度v
末
的81%以上即可。在部分区域,达到所确定的x范围为所求的理论速度v
末
的90%或95%以上。
97.具体的,孔的最大深度为距离地面60m,基于不同的施工区域,不同的孔深所对应的y范围为8.5m/s2~9.85m/s2(米每二次方秒)。因为受到孔内深层强夯法作业纬度和海拔的影响,孔内深层强夯法作业的海拔越高测量的实际重力加速度应在上述范围内的下限,孔内深层强夯法作业的纬度越高测量的实际重力加速度应在上述范围内的上限。这取决于在不同的施工位置。当获得绳体的放绳加速度达到这一范围的某一数值时,判定为合格的孔内深层强夯。
98.根据本发明提供的夯锤和绳体运动参数为质量控制的孔内深层强夯法,其中,参数信息还包括夯锤和绳体的夯击程度函数,确定所述夯锤和绳体在孔内深层强夯过程中,所述夯击程度函数满足z范围,且满足所述z范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯。
99.确定所述夯锤和绳体在孔内深层强夯过程中,所述夯击程度函数满足z范围,且满足所述z范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯的步骤,具体包括:
100.在一轮孔内深层强夯前,
101.设定所述夯锤的重量或所述夯锤和绳体的总重量,在一轮孔内深层强夯中,获取所述x范围和/或y范围,以确认所述夯锤和绳体的下落速度数值或范围,获取所述夯锤从下落至静止状态或所述夯锤从下落至最低运动状态期间,所述夯锤和绳体对所述填料的夯击力;
102.基于所述夯锤和绳体对所述填料的夯击力,所述夯锤下落至所述孔内填入填料表面前的最大夯击力为f
max
,所述夯锤进入所述孔内填入填料处于静止状态或最低运动状态的夯击力为f
min
,确定夯击力由所述f
max
至所述f
min
期间对应的变化时间t,从而获取所述夯击程度函数,确定所述夯击程度函数满足z范围,且满足所述z范围的孔内深层强夯次数达到预设次数,则判定为合格的一轮孔内深层强夯;
103.其中,所述f
min
为0或为最低夯击力预设值。
104.所述夯锤和绳体对所述填料的夯击力对应于所述卷扬机释放夯锤和绳体的拉力;
105.所述卷扬机至所述夯锤两端及绳体之间或周边范围内,例如以所述绳体为圆柱中心线五米范围内,设有拉力传感器/编码器,所述拉力传感器/编码器用于监测所述卷扬机释放夯锤和绳体的拉力,且测量所述夯锤和绳体下落至静止状态或最低运动状态期间从所述f
max
至所述f
min
变化的时间t,并给所述卷扬机通过所述绳体上拉所述夯锤和绳体的信号,以确保孔内深层强夯过程中充分释放对孔内填料的作用力;
106.基于所述卷扬机释放夯锤和绳体的拉力从f
max
至f
min
期间的时间t变化,获得所述夯击程度函数。
107.z范围的获取步骤,具体包括:获取所述夯锤和绳体的锤重、所述夯锤和绳体的下落速度以及所述夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
的下落路程数值或范围;
108.根据所述夯锤和绳体的锤重、所述夯锤和绳体的下落速度以及所述夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
的下落路程数值或范围,来确定夯击程度数值或范围,根据地勘报告的地质条件设定系数n,所述夯击程度数值或范围乘以系数n,来确定所述z范围;
109.其中,所述地质条件包括土实密度或土性质、地下水位及含水量,n≥0.81;
110.其中,所述夯锤和绳体的下落路程数值或范围为所述卷扬机释放绳体的放绳量,所述卷扬机释放绳体的放绳量包括所述夯锤下落至所述孔内填入填料表面时所述卷扬机的放绳量和所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量;
111.所述夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
的下落路程为所述夯锤进入所述孔内填入填料时所述卷扬机的余绳量的数值或范围。
112.也就是说,判定是否为合格的一轮孔内深层强夯,不仅要满足前述的夯锤和绳体的速度变化程度函数和/或夯锤和绳体的加速度变化程度函数,还需要满足孔内深层强夯过程中夯锤和绳体的夯击程度函数。也就是说,当速度变化程度函数满足x范围且夯击程度函数满足z范围,或当加速度变化程度函数满足y范围且夯击程度函数满足z范围,或当速度变化程度函数满足x范围且加速度变化程度函数满足y范围且夯击程度函数满足z范围,视为合格的一轮孔内深层强夯。
113.在夯锤和绳体进行自由落体运动的过程中,由于阻力或外因干扰,会使夯锤和绳体对填料的夯击程度各不相同,基于夯锤和绳体的锤重、夯锤和绳体的下落速度以及夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
的下落路程数值或范围,可以获取当次孔内深层强夯过程中夯锤和绳体的夯击程度函数,基于夯击程度函数与z范围进行比较,当夯击程度函数的数值大于等于z范围,且满足z范围的孔内深层强夯次数达到预设次数时,判定为合格的一轮孔内深层强夯。
114.夯锤和绳体的下落速度对应于绳体的放绳速度,夯锤和绳体对填料的作用时间对应于绳体结束放绳至绳体开始收绳的过程所使用的时间;
115.由于夯锤和绳体在自由落体运动的过程中时刻与绳体相连,那么夯锤和绳体的夯击力便对应于绳体放绳过程中的拉力。当绳体仅通过定滑轮导向后连接夯锤和绳体和卷扬机时,夯锤和绳体对填料的夯击程度的夯击力与绳体的拉力一致;若绳体上有动滑轮等机构,则夯锤和绳体对填料的夯击程度的夯击力与绳体的拉力需按比例进行折算。
116.具体的,t时间计算公式为ft=mv;
117.在实际施工过程中,z范围的目标函数结果中t取值为0.1s~2s(秒),或是t取值为0.1s~3s,根据夯锤和绳体的重量以及之前计算出来的夯锤和绳体与填料接触时的冲击速度,便可计算得出z范围。当夯击程度函数的数值大于等于该z范围时(即是夯锤和绳体从下落至静止状态或最低运动状态期间从f
max
至f
min
达到规定的消散时间),则判定为合格的一轮孔内深层强夯。
118.综上,在本发明的一个方案中,预设了夯锤和绳体下落路程数值或范围,通过位移传感器/编码器来锁定卷扬机的放绳量,在卷扬机放绳期间,通过加速度传感器/编码器监测加速度变化,来保证夯锤和绳体满足下落速度;在本发明的另一个方案中,预设了夯锤和绳体下落路程数值或范围,通过位移传感器/编码器来锁定卷扬机的放绳量,在卷扬机放绳期间,通过速度传感器/编码器测量夯锤和绳体的速度变化,来分析是否存在遇到不良原因
(如塌孔或渗水等问题)影响了夯锤和绳体下落的加速度;在本发明的另一个方案中,预设了夯锤和绳体下落路程数值或范围,通过位移传感器/编码器来锁定卷扬机的放绳量,在卷扬机放绳期间,通过加速度传感器/编码器监测加速度变化,通过速度传感器/编码器测量夯锤和绳体的速度变化,从而进行双重控制;在本发明的另一个方案中,在前述三个方案的基础上,通过力传感器或编码器测量夯锤和绳体下落至静止状态或最低运动状态期间从f
max
至f
min
变化的时间t,给卷扬机通过绳体上拉夯锤和绳体的信号,保证孔内深层强夯过程中被充分释放了对孔内填料的作用力。
119.综上,判断是否为合格的孔内深层强夯,需要同时的参数信息包括:夯锤和绳体的下落速度、夯锤和绳体的加下落速度以及夯锤和绳体从下落至静止状态或最低运动状态期间从f
max
至f
min
变化的时间t。也就是需要满足夯锤和绳体的速度变化程度函数满足x范围和/或夯锤和绳体的加速度变化程度函数满足y范围,夯锤和绳体的夯击程度函数满足z范围,且均需要达到预设次数。
120.进一步的,还能设定上述参数信息达到一定的次数才判定为合格的一轮孔内深层强夯,也就是说,在一轮孔内深层强夯的过程中,满足速度变化程度函数满足x范围且夯击程度函数满足z范围,或加速度变化程度函数满足y范围且夯击程度函数满足z范围,或速度变化程度函数满足x范围且加速度变化程度函数满足y范围且夯击程度函数满足z范围的孔内深层强夯称之为一次合格的孔内深层强夯,当达到一定次数合格的孔内深层强夯后,称之为一轮合格的孔内深层强夯。根据不同的施工地点,选择不同的达标次数。其中,一轮孔内深层强夯中夯锤和绳体的夯击次数为2~55次,在2~55次中达到一定次数的合格夯击,便判定为合格的一轮孔内深层强夯。在进行下一轮孔内深层强夯时,会先填入新的填料,并维持或提升夯锤和绳体的下落高度。
121.另一方面,本发明还提供一种夯锤和绳体运动参数为质量控制的孔内深层强夯系统,包括:
122.测量单元,设置于卷扬机至所述夯锤两端及绳体之间或周边范围内,用于采集孔内深层强夯过程中所述夯锤和绳体的运动参数信息;
123.计算单元,与所述测量单元信号连接,用于接收所述所述夯锤和绳体的运动参数信息,并计算所述夯锤和绳体的运动参数;
124.比较单元,与所述计算单元信号连接,用于接收夯锤和绳体的运动参数,并将孔内深层强夯过程中所述夯锤和绳体的运动参数与设定值进行比较,并发出比较信号;
125.提示单元,与所述比较单元信号连接,用于接收所述比较信号,在所述夯锤和绳体的运动参数不属于设定值时,所述提示单元产生提示音。
126.其中,所述计算单元和所述比较单元集成于plc控制器,基于plc闭环控制,将所采集到的运动参数信息进行计算后再发出比较信号。
127.通过提示单元产生提示音来发出报警信号或提示信号,从而使施工人员知晓并暂停继续施工,从而通过增加孔内深层强夯的对应次数进行补偿性施工。
128.下面结合图3-图6来进行具体示例:
129.以位于河北廊坊市香河县铁佛堂村垃圾填埋场西侧的拟建场地为例,该拟建场地为荒地,地势较平坦,起伏不大。地貌形态为平原,地貌单一,该拟建场地地下水属于第四系浅层孔隙潜水,实测稳定水位埋深5.20~6.90m。地下水以渗入~蒸发径流型为主,补给主
要来源为大气降水入渗和地表水入渗等,蒸发和水平向径流是主要的排泄方式。
130.其中,土层岩性特征自上而下描述如下:
131.①
层素填土:黄色,主要为粉土和粘性土,土质不均,见植物根系。局部钻孔为杂填土,含碎砖块、砖渣等建筑垃圾。揭露层厚0.50~3.20m,层底标高5.41~8.16m。64#和66#钻孔处填土较厚,设计时应考虑对建筑物的影响。
132.新近沉积层:
133.②
层粉质黏土:黄褐色,可塑,干强度中等,中等压缩性,中等韧性,稍有光泽。含礓石,见锈染,夹多层粉土薄层。该层在整个场地均有分布,揭露层厚1.20~4.20m,层底标高2.55~5.58m。
134.②‑
1层粉土:黄色,中密~密实,湿,干强度低,低韧性,摇振反应中等。土质不均,夹粉质粘土。该层分布不稳定,仅在局部有揭露,揭露层厚0.40~1.30m,层底标高6.34~7.06m。
135.③
层粉质黏土:灰黄色,软塑~可塑,干强度中等,中等压缩性,局部高压缩性,中等韧性,稍有光泽。见锈染,局部夹粉土薄层。该层在整个场地均有分布,揭露层厚1.10~4.80m,层底标高0.43~3.48m。
136.③‑
1层粉土:灰黄色,中密~密实,湿,干强度低,低韧性,摇振反应中等。含云母,夹粉质粘土薄层。该层分布不稳定,在场地局部缺失,揭露层厚2.70~3.50m,层底标高-8.91~-8.06m。
137.第四系全新统早期河湖相沉积层:
138.④
层粉质粘土:灰色,可塑,局部软塑,干强度中等,中等压缩性,中等韧性,稍有光泽。含礓石,见锈染,夹粉土薄层。该层分布不稳定,在场地局部缺失,揭露层厚1.10~5.20m,层底标高-4.20~-0.09m。
139.④‑
1层粉土:灰色,密实,湿,干强度低,低韧性,摇振反应中等。含云母,夹粉质粘土。该层分布不稳定,在场地局部缺失,揭露层厚0.70~3.40m,层底标高-4.93~0.08m。
140.⑤
层粉砂:灰黄色,中密,局部密实,饱和。主要矿物成分为云母、石英、长石。局部夹粉土薄层。该层在整个场地均有分布,揭露层厚1.60~4.60m,层底标高-7.41~-6.22m。
141.⑥
层粉质粘土:灰色,可塑,局部软塑,干强度中等,中等~高压缩性,中等韧性,稍有光泽。含礓石,见锈染,夹粉土薄层。该层在整个场地均有分布,揭露层厚1.50~3.90m,层底标高-10.79~-8.42m。
142.⑦
层粉质粘土:灰黄、褐黄色,可塑,干强度中等,中等压缩性,中等韧性,稍有光泽。含礓石,见锈染,夹粉土薄层。该层在整个场地均有分布,揭露层厚4.50~7.80m,层底标高-17.12~-13.49m。
143.⑧
层粉砂夹粉土:灰色,密实,饱和。主要矿物成分为云母、石英、长石。粉土:湿,密实。土质不均,夹大量粉质粘土。该层部分钻孔未钻穿,揭露层厚0.60~2.70m,层底标高-18.19~-15.07m。
144.第四系上更新统层河湖相沉积:
145.⑨
层粉质粘土:灰色,可塑,局部硬塑,干强度中等,中等压缩性,中等韧性,稍有光泽。含礓石,见锈染,夹粉土薄层。该层局部钻孔未钻穿,揭露层厚7.40~11.50m,层底标高-27.21~-24.99m。
146.⑩
层粉砂:灰、灰黄色,密实,饱和。主要矿物成分为云母、石英、长石。局部夹粉土薄层。该层局部钻孔未钻穿,揭露层厚9.00~12.00m,层底标高-37.23~-35.42m。
147.层粉质粘土:灰色,可塑,局部硬塑,干强度中等,中等压缩性,中等韧性,稍有光泽。含礓石,见锈染,夹粉土薄层。该层局部钻孔未钻穿,揭露层厚3.80~5.00m,层底标高-41.55~-39.34m。
148.层粉砂:灰色,密实,饱和。主要矿物成分为云母、石英、长石。局部夹粉土薄层。该层钻孔未钻穿,揭露最大层厚6.70m。
149.在位于拟建场地的zk38号勘察孔(以下称为zk38#孔)内,zk38#孔的参数如下:
[0150][0151]
如图3所示,根据zk38#孔所示,场地
±
0标高为9.1m(垂直标高),目前zk38#孔的孔口标高为8.58m(垂直标高),孔内深层强夯的成孔设备在标高为8.58m(垂直标高)开始成孔,成孔的孔底标高为到
⑤
粉砂层入层1m就是标高为-3.92m(垂直标高),因此成孔的孔深为8.58m+3.92m=12.5m(垂直高度米)。填料后孔底高度上升1m(垂直高度米),按1m为1轮孔内深层强夯考虑,除去基础埋深6.26m,9.1m+3.92m-6.26m=6.76m(垂直高度米),因此需要孔内深层强夯进行7轮作业,因设计指标复合地基承载力特征值≥350kpa,设定每轮孔内深层强夯下落并夯扩孔内的填料12次(即预设次数为12次)。
[0152]
在zk38#孔位置的孔内深层强夯,其选用的是3.5吨的夯锤,夯锤为一个标记物,因设计指标复合地基承载力特征值≥350kpa,设定夯锤自由落体的高度为h=10m(h为下落的落距),这就意味着在第一轮孔内深层强夯过程中,因填料后孔底高度上升1m(垂直高度米),夯锤的初始下落位置在标高7.08m(垂直标高),场地位置在河北省廊坊市香河县郊区,因不存在海拔和纬度的特殊影响重力加速度为9.8m/s2,加速度设定在a=9.7m/s2(a为下落的加速度,也即y范围为9.7),由于夯锤自由落体下落引起的绳体最大速度为v=√(2
×a×
h)=√194=13.93m/s(a为下落的加速度,h为下落的落距),因此在zk38#孔及该勘察孔周围的孔内深层强夯的桩体都设定为v≥13.9m/s(也即x范围为13.9)的速度对比值,通过速度传感器采集数据和对比,实现判断每一次夯扩孔内的填料是否有效。因过程中额外还需要对下落加速度设定为a≥9.7m/s2的加速度对比值,通过加速度传感器采集数据和对比,避免因河北省廊坊市香河县地下水位标高为6.15m(垂直标高),在这个标高存在一层地下水,容易地下水渗入,需要对夯锤引起的绳体下落的加速度实时监控,进一步保证每一次夯扩孔内的填料的工程质量。
[0153]
因zk38#孔位置处于香河县新建生活垃圾焚烧发电项目的北侧,距离南侧地下水含量高的区域较远,在zk38#孔边第971#的孔内深层强夯的桩体,一共进行了7轮作业,在第1轮孔内深层强夯中,一共下落并夯扩孔内填料共计15次,其中第4次、第6次、第13次的下落最大速度受到地下水渗入影响分别为12.5m/s、13.7m/s、13.3m/s,其余下落最大速度都>13.9m/s;监测到第4次、第6次、第13次的加速度分别为7.8m/s2、9.3m/s2、8.8m/s2,其余下落加速度都≥9.7m/s2,因此在第1轮孔内深层强夯中做了3次补充下落和夯扩。同时采用冲击
力也就是夯锤自由落体下落实现对孔内填料的最大冲击力f=(m*√2
×g×
h)/t,t为冲击时间设定为1s(也即夯锤对填料的作用时间为1s),f=【3.5t
×
√(2
×
9.7m/s2×
10m)】/1s=48720n,通过设定拉力传感器f≥48500n(也即z范围为48500),对第1轮孔内深层强夯中的每一次夯扩的冲击力进行二次复核。利用上述方式进行孔内深层强夯后,不仅能使施工效率提升20%,还能增加安全保证,避免由于人员靠近大型工程机械产生人员安全的隐患,实现纯机械化施工,更多的是实现了孔内深层强夯的质量可控化。
[0154]
在位于拟建场地的zk48号勘察孔(以下称为zk49#孔)内,zk49#孔的参数如下:
[0155][0156]
如图4所示,根据zk49#孔所示,场地
±
0标高为9.1m(垂直标高),目前zk49#孔的孔口标高为8.28m(垂直标高),孔内深层强夯的成孔设备在标高为8.28m(垂直标高)开始成孔,成孔的孔底标高为到
⑤
粉砂层顶就是标高为-3.22m(垂直标高),因此成孔的孔深为8.28m+3.22m=11.5m(垂直高度米)。填料后孔底高度上升1m(垂直高度米),按1m为1轮孔内深层强夯考虑,除去基础埋深2.9m,9.1m+3.22m-2.9m=9.42m(垂直高度米),因此需要孔内深层强夯进行10轮作业,因设计指标复合地基承载力特征值≥250kpa,设定每轮孔内深层强夯下落并夯扩孔内的填料9次(即预设次数为9次)。
[0157]
在zk49#孔位置的孔内深层强夯,其选用的是3.5吨的夯锤,夯锤为一个标记物,因设计指标复合地基承载力特征值≥250kpa,设定夯锤自由落体的高度为h=8m(h为下落的落距),这就意味着在第七轮孔内深层强夯过程中,因填料后孔底高度上升7m(垂直高度米),夯锤的初始下落位置在标高11.78m(垂直标高),场地位置在河北省廊坊市香河县郊区,因不存在海拔和纬度的特殊影响重力加速度为9.8m/s2,加速度设定在a=9.7m/s2(a为下落的加速度,也即y范围为9.7),由于夯锤自由落体下落引起的绳体最大速度为v=√(2
×a×
h)=√155.2=12.46m/s(a为下落的加速度,h为下落的落距),因此在zk49#孔及该勘察孔周围的孔内深层强夯的桩体都设定为v≥12.4m/s(也即x范围为12.4)的速度对比值,通过速度传感器采集数据和对比,实现判断每一次夯扩孔内的填料是否有效。因过程中额外还需要对下落加速度设定为a≥9.7m/s2的加速度对比值,通过加速度传感器采集数据和对比,避免因河北省廊坊市香河县地下水位标高为6.15m(垂直标高),在这个标高存在一层地下水,容易地下水渗入,需要对夯锤引起的绳体下落的加速度实时监控,进一步保证每一次夯扩孔内的填料的工程质量。
[0158]
因zk49#孔位置处于香河县新建生活垃圾焚烧发电项目的南侧,场地南侧地下水含量高,成孔后易发生地下水渗入的情况,在zk49#孔边第352#的孔内深层强夯的桩体,一共进行了10轮作业,在第7轮孔内深层强夯中,一共下落并夯扩孔内填料共计14次,其中第2次、第3次、第4次、第6次、第8次的下落最大速度受到地下水渗入影响分别为10.5m/s、10.3m/s、11.2m/s、11.9m/s、12.1m/s,其余下落最大速度都>12.4m/s;监测到第2次、第3次、第4次、第6次、第8次的加速度分别为6.9m/s2、6.6m/s2、7.8m/s2、8.9m/s2、9.1m/s2,其余下落加速度都≥9.7m/s2,因此在第7轮孔内深层强夯中做了5次补充下落和夯扩。同时采用
冲击力也就是夯锤自由落体下落实现对孔内填料的最大冲击力f=(m*√2
×g×
h)/t,t为冲击时间设定为1s,f=【3.5t
×
√(2
×
9.7m/s2×
8m)】/1s=43602n,通过设定拉力传感器f≥43500n(也即z范围为43500),对第7轮孔内深层强夯中的每一次夯扩的冲击力进行二次复核。利用上述方式进行孔内深层强夯后,不仅能使施工效率提升20%,还能增加安全保证,避免由于人员靠近大型工程机械产生人员安全的隐患,实现纯机械化施工,更多的是实现了孔内深层强夯的质量可控化。
[0159]
以位于山西阳泉市盂县,盂县地理位置偏北,处太行山之巅的拟建场地为例,该拟建场地为地形南高北低,各勘探点地面高程介于941.2~952.7m之间,相对高差11.5m。隶属于中低山地貌单元,地势开阔,现为空地。
[0160]
该拟建场地既有纬度地带性气候,又有明显的垂直变化。中纬度地区,距海不远,但因山脉屏障,夏季风影响不大,属于暖温带、温带大陆性气候。春季干旱多风,夏季高温炎热,秋季凉爽多雨,冬季寒冷少雪,四季分明,年均降雨量500~618毫米,霜冻期为9月下旬至次年4月,无霜期约150天。标准冻结深度为0.88,本区为干燥指数大于1.5的干旱区。勘探期为丰水期,勘探深度范围内未揭露地下水。
[0161]
其中,土层岩性特征自上而下描述如下:
[0162]
第(1)层填土(q4ml):杂色,为近期人工回填,主要由粉土组成,含植物根系、碎石、细砂、混凝土块、风化岩、煤渣等,土质不均匀,结构疏松。该层层底埋深约0.6~19.4m。
[0163]
第(2)层粉土(q3al+pl):浅红色,稍湿,中密,含少量钙质结核,局部夹有少量碎石、细砂,可见黑色斑点。摇振反应中等,切面无光泽,干强度低,韧性低。该层层底埋深5.8~16.6m,厚约1.0~8.9m。
[0164]
第(3)层砾石(q3al+pl):杂色,中密,稍湿,分选性一般,呈尖菱状及少量岩夹土状,夹有少量卵石。充填物为粉土杂砾砂。该层层底埋深7.2~15.8m,厚约0.5~5.3m。
[0165]
第(4)层粉土(q3al+pl):褐黄色,稍湿,密实,含有碎石、细砂,可见黑色斑点。摇振反应中等,切面无光泽,干强度低,韧性低。该层层底埋深9.7~22.9m,厚约0.8~6.3m。
[0166]
第(5)层砾石(q3al+pl):杂色,中密,湿,分选性一般,呈尖菱状及少量岩夹土状,夹有卵石,偶见漂石。充填物为粉土杂砾砂。该层层底埋深12.6~22.4m,厚约1.2~5.3m。
[0167]
第(6)层泥岩(p):灰褐色,泥质结构,全风化,结构基本破坏,散体状结构。岩体基本质量等级为
ⅴ
级。主要矿物成分为粘土矿物等。该层层底埋深16.5~23.1m,厚约1.3~5.8m。
[0168]
第(7)层泥岩(p):灰色,泥质结构,强风化,结构大部分破坏,岩体破碎,岩芯呈片状。岩体基本质量等级为
ⅴ
级。主要矿物成分为粘土矿物等。
[0169]
第(8)层砂岩(p):灰黄色,砂质结构,强风化,岩体较破碎,岩芯呈饼状。岩体基本质量等级为
ⅴ
级。主要矿物成分为石英、长石及黏土矿物等。
[0170]
第(9)层泥岩(p):灰褐色,泥质结构,强风化,结构大部分破坏,岩体破碎,岩芯呈片状。岩体基本质量等级为
ⅴ
级。主要矿物成分为粘土矿物等。
[0171]
第(10)层泥岩(p):灰褐色,泥质结构,强风化,结构大部分破坏,岩体破碎,岩芯呈饼状。岩体基本质量等级为
ⅴ
级。主要矿物成分为粘土矿物等。该层为此次勘察终止地层,最大揭露厚度约10.0m。
[0172]
在位于拟建场地的k28#孔(以下称为k28#孔)内,k28#孔的参数如下:
[0173]
±
0标高基础埋深持力层/标高桩长复合地基承载力特征值951.9m9.8m到(6)泥岩层顶/922.9m19.2m≥280kpa
[0174]
如图5所示,根据k28#孔所示,场地
±
0标高为951.9m(垂直标高),目前k28#孔的孔口标高为942.3m(垂直标高),孔内深层强夯的成孔设备在标高为942.3m(垂直标高)开始成孔,成孔的孔底标高为到(6)泥岩层顶就是标高为922.9m(垂直标高),因此成孔的孔深为942.3m-922.9m=19.4m(垂直高度米)。填料后孔底高度上升2.65m(垂直高度米),按2.65m为1轮孔内深层强夯考虑,除去基础埋深9.8m,951.9m-9.8m-922.9m=19.2m(垂直高度米),因此需要孔内深层强夯进行8轮作业,因设计指标复合地基承载力特征值≥280kpa,设定每轮孔内深层强夯下落并夯扩孔内的填料10次(即预设次数为10次)。
[0175]
在k28#孔位置的孔内深层强夯,其选用的是11吨的夯锤,夯锤为一个标记物,因设计指标复合地基承载力特征值≥280kpa,设定夯锤自由落体的高度为h=8m(h为下落的落距),这就意味着在第三轮孔内深层强夯过程中,因填料后孔底高度上升7.95m(垂直高度米),夯锤的初始下落位置在标高938.85m(垂直标高),场地位置在山西阳泉市盂县郊区,因不存在海拔和纬度的特殊影响重力加速度为9.78m/s2,加速度设定在a=9.7m/s2(a为下落的加速度,也即y范围为9.7),由于夯锤自由落体下落引起的绳体最大速度为v=√(2
×a×
h)=√155.2=12.46m/s(a为下落的加速度,h为下落的落距),因此在k28#孔及该勘察孔周围的孔内深层强夯的桩体都设定为v≥12.4m/s(也即x范围为12.4)的速度对比值,通过速度传感器采集数据和对比,实现判断每一次夯扩孔内的填料是否有效。因过程中额外还需要对下落加速度设定为a≥9.7m/s2的加速度对比值,通过加速度传感器采集数据和对比,避免因山西阳泉市盂县地处五台山山区,场地内为干燥指数大于1.5的干旱区,由于场地内地基土过于干燥,在成孔和夯扩过程中上层孔壁土易塌孔,容易影响夯锤的自由落体下落结果和夯扩质量,需要对夯锤引起的绳体下落的加速度实时监控,进一步保证每一次夯扩孔内的填料的工程质量。
[0176]
因k28#孔位置处于项目原料堆棚的中心区域,成孔后存在严重的塌孔情况,在k28#孔边第1856#的孔内深层强夯的桩体,一共进行了8轮作业,在第3轮孔内深层强夯中,一共下落并夯扩孔内填料共计17次,其中第1次、第2次、第4次、第5次、第6次、第9次、第13次的下落最大速度受到垮塌孔壁的影响分别为9.3m/s、9.2m/s、9.5m/s、9.9m/s、10.7m/s、11.8m/s、12.0m/s,其余下落最大速度都>12.4m/s;监测到第1次、第2次、第4次、第5次、第6次、第9次、第13次的加速度分别为5.4m/s2、5.3m/s2、5.6m/s2、6.1m/s2、7.2m/s2、8.7m/s2、9m/s2,其余下落加速度都≥9.7m/s2,因此在第3轮孔内深层强夯中做了7次补充下落和夯扩。同时采用冲击力也就是夯锤自由落体下落实现对孔内填料的最大冲击力f=(m*√2
×g×
h)/t,t为冲击时间设定为1s,f=【11t
×
√(2
×
9.7m/s2
×
8m)】/1s=137037n,通过设定拉力传感器f≥137000n(也即z范围为137000),对第3轮孔内深层强夯中的每一次夯扩的冲击力进行二次复核。利用上述方式进行孔内深层强夯后,不仅能使施工效率提升20%,还能增加安全保证,避免由于人员靠近大型工程机械产生人员安全的隐患,实现纯机械化施工,更多的是实现了孔内深层强夯的质量可控化。
[0177]
以位于四川资阳市雁江区的拟建场地为例,该拟建场地整平后将在红线南侧及东南侧形成环境边坡,南侧边坡最高10.3m,东南角边坡4.1m。该拟建场地整体地势西高东低,略有起伏,一般坡角10~20
°
,局部较陡地带坡角达45
°
。场地最大高程388m,最小高程378m,
相对高差为10m。场地内表层多为人工填土,厚度差异较大,植被覆盖率低。场区内无断层,构造裂隙较发育,地质构造简单,属构造剥蚀浅丘地貌,主要由冲沟及斜坡组成。
[0178]
该拟建场地处于四川盆地中部,属亚热带季风气候,全年云雾多而日照少,空气湿度大而昼夜温差小;平均风速小,大风日数少。年平均降雨量为950mm,季节性明显,集中分布在每年7月、8月。主要水系为沱江河。拟建场地地下水来源主要为大气降雨和地面水体渗透补给,水量大小与降水因素关系密切,受气候和季节性变化较大。地表水体主要为河水;地下水主要为上层滞水及潜水,地下水可分为松散岩类孔隙水及基岩裂隙水两类。
[0179]
该拟建场地内有特殊性岩土——素填土。主要由粉质黏土、细粒土及块石组成。结构松散~稍密,骨架颗粒排列混乱,大部分不接触,级配不良。该填土层为场地平整时堆填,回填时间1至3年,为新近填土。回填时间短,尚未完成自重固结,具高压缩性,物理力学性质差,易发生不均匀沉降,在强降雨时易发生渗透变形。
[0180]
其中,土层岩性特征自上而下描述如下:
[0181]
1素填土(q4ml)
[0182]
杂色,主要由粉质黏土、细粒土及块石组成。粉质黏土为红褐色,呈可塑~硬塑状,切面无光泽,干强度等,韧性中等,无摇振反应。块石母岩成分主要为泥岩、砂岩,粒径一般5~80mm,呈中~微风化,磨圆度一般,呈棱角~次棱角状,颗粒含量14%~19%,结构松散~稍密,骨架颗粒排列混乱,大部分不接触,级配不良,钻机钻进时钻杆稍有跳动,孔壁易坍塌。该填土层为场地平整时堆填,回填时间为1至3年,钻探揭露最大厚度37.2m(zk63)。
[0183]
2粉质黏土(q4el+dl)
[0184]
红褐色,主要由粘土矿物组成,呈软塑~可塑状,刀切面稍有光泽,干强度中等,韧性中等,无摇振反应。手搓有砂感,可搓成粗泥条。局部夹泥岩、砂岩块石,粒径3~10mm,呈强风化状,钻进正常。该层上覆填土,下伏基岩,钻探揭露最大厚度5.1m(zk43)。
[0185]
3泥岩(j3sn-ms)
[0186]
红褐色,主要由粘土矿物组成,泥质结构,中厚层状构造,局部含砂质斑团。强风化层裂隙较发育,岩芯呈碎块状,手捏易碎;中风化层岩芯多呈柱状、长柱状,锤击声哑。
[0187]
该层在场地内均有分布,为本场地主要岩层。其中,中风化泥岩的rqd值为75%~80%,岩石质量较好。
[0188]
4泥质砂岩(j3sn-sm)
[0189]
灰褐色主要由石英、长石及云母等矿物组成,中细粒结构,中厚层状构造,局部含泥质较重。强风化层裂隙较发育,岩芯呈碎块状,手捏易碎;中风化层岩芯多呈柱状、长柱状,锤击声哑。该层在场地内均有分布,为本场地主要岩层。其中,中风化泥质砂岩的rqd值为75%~80%,岩石质量较好。
[0190]
5砂岩(j3sn-ss)
[0191]
灰白色,主要由石英、长石及云母等矿物组成,中~细粒结构,钙质胶结,中厚层状构造,强风化层裂隙发育,岩芯呈碎块状;中风化层岩芯多呈柱状,岩质较硬,锤击声较清脆。
[0192]
该层在场地内均有分布,为本场地主要岩层。其中,中风化砂岩的rqd值为75%~83%,岩石质量较好。
[0193]
在位于拟建场地的zk109#孔(以下称为zk109#孔)内,zk109#孔的参数如下:
[0194][0195]
如图6所示,根据zk109#孔所示,场地
±
0标高为387.65m(垂直标高),目前zk109#孔的孔口标高为363.10m(垂直标高),场地现状并不平整,因此该场地先经过回填后,回填至标高为386m(垂直标高),孔内深层强夯的成孔设备在标高为386m(垂直标高)开始成孔,成孔的孔底标高为到4层中风化泥质砂岩顶就是标高为355.4m(垂直标高),因此成孔的孔深为386m-355.4m=30.6m(垂直高度米)。填料后孔底高度上升2.65m(垂直高度米),按2.65m为1轮孔内深层强夯考虑,除去基础埋深2m,387.65m-2m-355.4m=30.25m(垂直高度米),因此需要孔内深层强夯进行12轮作业,因设计指标复合地基承载力特征值≥150kpa,设定每轮孔内深层强夯下落并夯扩孔内的填料7次(即预设次数为7次)。
[0196]
在zk109#孔位置的孔内深层强夯,其选用的是11吨的夯锤,夯锤为一个标记物,因设计指标复合地基承载力特征值≥150kpa,设定夯锤自由落体的高度为h=8m(h为下落的落距),这就意味着在第二轮孔内深层强夯过程中,因填料后孔底高度上升5.3m(垂直高度米),夯锤的初始下落位置在标高368.7m(垂直标高),场地位置在四川资阳市雁江区郊区,因不存在海拔和纬度的特殊影响重力加速度为9.77m/s2,加速度设定在a=9.7m/s2(a为下落的加速度,也即y范围为9.7),由于夯锤自由落体下落引起的绳体最大速度为v=√(2
×a×
h)=√155.2=12.46m/s(a为下落的加速度,h为下落的落距),因此在zk109#孔及该勘察孔周围的孔内深层强夯的桩体都设定为v≥12.4m/s(也即x范围为12.4)的速度对比值,通过速度传感器采集数据和对比,实现判断每一次夯扩孔内的填料是否有效。因过程中额外还需要对下落加速度设定为a≥9.7m/s2的加速度对比值,通过加速度传感器采集数据和对比,避免因四川资阳市雁江区正常情况下不存在塌孔或地下水渗水的不良情况,但仍需要对夯锤引起的绳体下落的加速度实时监控,进一步保证每一次夯扩孔内的填料的工程质量。
[0197]
因zk109#孔边第756#的孔内深层强夯的桩体,一共进行了12轮作业,在第2轮孔内深层强夯中,一共下落并夯扩孔内填料共计8次,其中第3次的下落最大速度可能受到轻度垮塌孔壁的影响为11.9m/s,其余下落最大速度都>12.4m/s;监测到第3次的加速度为8.9m/s2,其余下落加速度都≥9.7m/s2,因此在第2轮孔内深层强夯中做了1次补充下落和夯扩。同时采用冲击力也就是夯锤自由落体下落实现对孔内填料的最大冲击力f=(m*√2
×g×
h)/t,t为冲击时间设定为1s,f=【11t
×
√(2
×
9.7m/s2
×
8m)】/1s=137037n,通过设定拉力传感器f≥137000n(也即z范围为137000),对第3轮孔内深层强夯中的每一次夯扩的冲击力进行二次复核。利用上述方式进行孔内深层强夯后,不仅能使施工效率提升20%,还能增加安全保证,避免由于人员靠近大型工程机械产生人员安全的隐患,实现纯机械化施工,更多的是实现了孔内深层强夯的质量可控化。
[0198]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;
而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1