一体化泵站式智能基坑排水系统的制作方法
1.本技术涉及排水技术领域,尤其是涉及一体化泵站式智能基坑排水系统。
背景技术:
2.一体化泵站是一种提升污水,雨水,饮用水,废水的提升装备,由顶盖、玻璃钢(grp)筒体、底座、潜水泵、服务平台、管道等部分组成。
3.相关技术中,一体化泵站会在进水管的输出端设置过滤器,然后通过过滤器过滤并收集进水管中的杂质。但是过滤器通常是设置在筒体的底部,那么在实际的工作过程中只能对水中的沉积类杂质进行过滤收集,很难对水中的漂浮类杂质进行过滤收集,而且当筒体内的漂浮类垃圾堆积过多时,容易造成筒体内堵塞的情况发生。
技术实现要素:
4.为了减少漂浮类垃圾对一体化泵站造成堵塞的情况发生,本技术提供一种一体化泵站式智能基坑排水系统。
5.本技术提供的一种一体化泵站式智能基坑排水系统采用如下的技术方案:一体化泵站式智能基坑排水系统,包括化泵站本体以及基坑,所述化泵站本体安装在所述基坑内,所述化泵站本体的侧壁设置有开口,且所述开口处密封安装有侧板,所述侧板的外侧面沿中轴线的方向固定安装有转轴,所述化泵站本体的外侧壁安装有用于驱动所述转轴转动的驱动件,所述化泵站本体的外侧壁设置有收集组件,所述收集组件用于收集垃圾。
6.通过采用上述技术方案,工作时,通过驱动件驱动侧板转动,从而使得侧板能够将化泵站本体内部水中漂浮的垃圾进行清扫,并将漂浮的垃圾扫出开口外,然后通过收集组件对垃圾进行收集,从而能够减少漂浮类垃圾对一体化泵站造成堵塞的情况发生。
7.可选的,所述收集组件包括收集筒、导向板以及收集盒,所述收集筒呈竖直安装在基坑内,且所述收集筒位于所述化泵站本体的一侧外,所述收集筒的侧壁开设有收集口,所述导向板固定安装于所述化泵站本体的外侧壁,所述导向板位于所述开口侧的下方,且所述导向板的另一端与所述收集口相连通,所述导向板沿靠近所述开口的一端朝向靠近所述收集口的一端呈倾斜向下设置,所述收集盒沿竖直方向滑移安装在所述收集筒内,所述收集筒的顶部安装有用于驱动所述收集盒沿竖直方向滑移的升降组件。
8.通过采用上述技术方案,工作时,垃圾能沿开口掉落到导向板上,并沿导向板掉落到收集筒内,最后落入收集盒内,从而能够通过升降组件控制收集盒升起,方便工作人员对收集盒内收集的垃圾进行清理。
9.可选的,所述升降组件包括牵引电机,所述收集筒的顶部安装有安装架,所述安装架转动安装有收卷轮,所述收集轮内设置有牵引绳,所述牵引绳的另一端设置有挂钩,所述收集盒的顶部安装有挂杆,所述挂钩用于与所述挂杆挂接设置,所述牵引电机用于驱动所述收集轮转动。
10.通过采用上述技术方案,在牵引电机启动时,牵引电机的驱动轴能够带动收集轮转动,使得收集轮对牵引绳进行收卷或者放出,进而实现了对收集盒的升降控制。
11.可选的,所述化泵站本体的内部安装有触发组件,所述触发组件用于控制所述驱动件启动或停止。
12.通过采用上述技术方案,触发组件的设置,能够实现对驱动件的自动管理控制,从而有利于整体工作的智能化管理。
13.可选的,所述触发组件包括触发浮球,所述触发浮球的底部固定设置有拉绳,所述化泵站本体内的底部安装有触发器,所述拉绳远离触发浮球的另一端与所述触发器相连接,当所述拉绳拉动所述触发器时,所述触发器用于控制所述驱动件启动。
14.通过采用上述技术方案,当化泵站本体内部的填充有水时,触发浮球在水的浮力作用下进行漂浮并拉动拉绳。当拉绳拉动触发器时,触发器触发并控制驱动电机启动,从而实现了触发器对驱动件的启动控制。
15.可选的,所述触发组件还包括红外发射器,所述红外发射器嵌设安装在所述侧板的侧边,所述红外发射器与所述触发器之间安装有延时器,且所述红外发射器与所述触发器之间通过所述延时器电连接,所述化泵站本体位于开口处的侧边嵌设有红外接收开关,所述红外接收开关用于控制所述驱动件停止。
16.通过采用上述技术方案,工作时,触发器触发,然后向红外发射器发送触发信号,经过延时器的延时后,控制红外发射器启动,此时红外发射器发出红外信号,在侧板闭合开口时,红外发射器与红外接收开关对准,从而使得红外接收开关启动并控制驱动件停止。
17.可选的,所述收集筒的底部安装缓冲弹簧,所述缓冲弹簧的另一端与所述收集盒的底部相接触。
18.通过采用上述技术方案,缓冲弹簧的设置,能对收集盒起到缓冲的作用。
19.可选的,所述收集盒的侧壁安装有多个缓速滑轮,所述收集筒的侧壁沿竖直方向开设有多个导向槽,多个所述缓速滑轮分别与多个所述导向槽滑移配合。
20.通过采用上述技术方案,缓速滑轮与导向槽的配合设置,能够进一步对收集盒起到缓速的作用,从而能够保护收集盒。
21.可选的,包括信号发送器以及控制室,当所述收集盒装满时,所述信号发送器用于向所述控制室发送信号。
22.通过采用上述技术方案,信号发送器以及控制室的配合设置,能够通知工作人员前往对应地点对收集盒内的垃圾进行收集清理,进而可以实现对多个地点的收集盒内收集杂物进行集中调控,不需要时刻对收集盒内杂物的收集情况进行检查,实现对系统的智能化控制管理。
23.可选的,所述收集筒的底部安装有重力感应器,所述重力感应器与所述信号发送器电连接,且所述重力感应器用于与所述收集盒的底部相接触,当所述重力感应器与所述收集盒的底部相接触时,所述重力感应器触发。
24.通过采用上述技术方案,重力感应器的设置,实现了信号发送器向控制室发送信号的作用,从而实现了对系统的智能化控制管理。
25.综上所述,本技术包括以下至少一种有益技术效果:工作时,通过驱动件驱动侧板转动,从而使得侧板能够将化泵站本体内部水中漂
浮的垃圾进行清扫,并将漂浮的垃圾扫出开口外,然后通过收集组件对垃圾进行收集,从而能够减少漂浮类垃圾对一体化泵站造成堵塞的情况发生;触发组件的设置,能够实现对驱动件的自动管理控制,从而有利于整体工作的智能化管理;缓冲弹簧的设置,能对收集盒起到缓冲的作用,从而能够保护收集盒;信号发送器以及控制室的配合设置,能够通知工作人员前往对应地点对收集盒内的垃圾进行收集清理,进而可以实现对多个地点的收集盒内收集杂物进行集中调控,不需要时刻对收集盒内杂物的收集情况进行检查,实现对系统的智能化控制管理。
附图说明
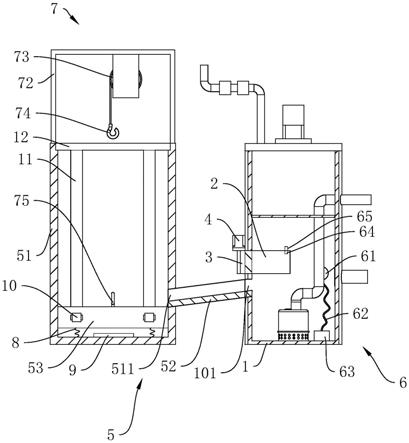
26.图1是本技术实施例一种一体化泵站式智能基坑排水系统的整体结构示意图。
27.图2是本技术实施例一种一体化泵站式智能基坑排水系统的收集筒内部以及化泵站本体内部结构示意图。
28.附图标记说明:1、化泵站本体;101、开口;2、侧板;3、转轴;4、驱动件;5、收集组件;51、收集筒;511、收集口;52、导向板;53、收集盒;6、触发组件;61、触发浮球;62、拉绳;63、触发器;64、红外发射器;65、红外接收开关;7、升降组件;71、牵引电机;72、安装架;73、收卷轮;74、挂钩;75、挂杆;8、缓冲弹簧;9、重力感应器;10、缓速滑轮;11、导向槽;12、筒盖。
具体实施方式
29.以下结合附图1-2对本技术作进一步详细说明。
30.本技术实施例公开一种一体化泵站式智能基坑排水系统。参照图1和图2,一体化泵站式智能基坑排水系统包括化泵站本体1以及基坑,化泵站本体1安装在基坑内,化泵站本体1的侧壁设置有开口101,且开口101处密封安装有侧板2,侧板2的外侧面沿中轴线的方向固定安装有转轴3,化泵站本体1的外侧壁安装有用于驱动转轴3转动的驱动件4,化泵站本体1的外侧壁设置有收集组件5,收集组件5用于收集垃圾。
31.参照图1和图2,在本实施例中,驱动件4是驱动电机,驱动电机呈竖直安装在化泵站本体1的外侧壁,且位于开口101的上方。能够减少侧板2开启时,化泵站本体1内的部分水分溢出打湿驱动电机的情况发生。驱动电机的驱动轴与转轴3同轴固定连接,从而能够通过驱动轴带动转动,控制侧板2的开启与闭合。减少在实施例的另一实施方式中,驱动件4还可以是电动机、伺服电机等等。
32.参照图1和图2,化泵站本体1的内部安装有触发组件6。具体的,触发组件6包括触发浮球61,触发浮球61放置在化泵站本体1的内部,可以在水的作用下进行漂浮。触发浮球61的底部固定设置有拉绳62,化泵站本体1内的底部安装有触发器63,拉绳62远离触发浮球61的另一端与触发器63相连接。当化泵站本体1内部的填充有水时,触发浮球61在水的浮力作用下进行漂浮并拉动拉绳62。当拉绳62拉动触发器63时,触发器63触发并控制驱动电机启动,从而使得侧板2转动并对水面的漂浮物进行清扫。
33.参照图1和图2,触发组件6还包括红外发射器64以及红外接收开关65。红外发射器64嵌设安装在侧板2的侧边,红外接收开关65嵌设安装在化泵站本体1位于开口101处的侧
边内,在侧板2闭合开口101时,红外发射器64与红外接收开关65相对准。在本实施例中,触发器63触发时,还能控制红外发射器64启动,从而对红外接收开关65发射红外信号。在本实施例中,红外发射器64与触发器63之间安装有延时器,且红外发射器64与触发器63之间通过延时器电连接。延时器的设置,能够对触发器63发送的触发信号进行延时,从而使得驱动电机的启动与红外发射器64的启动时间错开,进而能够保证在驱动电机启动之后,红外发射器64再启动并发射红外信号,从而能减少触发器63与红外发射器64同时启动,使得驱动电机同时接收到启动以及停止信号的情况发生,进而实现了对化泵站本体1内部漂浮杂物进行自动清理的智能化作业管理。
34.参照图1和图2,收集组件5包括收集筒51、导向板52以及收集盒53,收集筒51呈竖直安装在基坑内,且收集筒51位于化泵站本体1的一侧外。收集筒51的侧壁开设有收集口511。导向板52固定安装于化泵站本体1的外侧壁,导向板52位于开口101侧的下方,且导向板52的另一端与收集口511相连通。导向板52沿靠近开口101的一端朝向靠近收集口511的一端呈倾斜向下设置。在侧板2将水面漂浮的杂物推出开口101外时,杂物能够落到导向板52上,并沿导向板52滑落进收集筒51内,从而实现了对杂物的初步收集作用。收集盒53沿竖直方向滑移安装在收集筒51内,用于收集从收集口511掉入收集筒51内的杂物。收集筒51的顶部安装有用于驱动收集盒53沿竖直方向滑移的升降组件7。从而可以通过升降组件7控制收集盒53上升,从而方便清理人员位于收集筒51的顶部将收集盒53内收集的杂物进行清理。
35.参照图1和图2,升降组件7包括牵引电机71,收集筒51的顶部安装有安装架72,安装架72转动安装有收卷轮73,收集轮内设置有牵引绳,牵引绳的另一端设置有挂钩74,收集盒53的顶部安装有挂杆75,挂钩74用于与挂杆75挂接设置。牵引电机71安装在安装架72上,且牵引电机71的驱动轴与收集轮同轴固定连接。从而在牵引电机71启动时,牵引电机71的驱动轴能够带动收集轮转动,使得收集轮对牵引绳进行收卷或者放出,进而实现了对收集盒53的升降控制。收集筒51的顶部安装有用于密封收集筒51的筒盖12,在挂钩74与挂杆75分离时,可以通过筒盖12对收集筒51的顶部进行密封,从而能够减少雨水落入收集盒53内的情况发生,保持收集筒51内部的干燥环境。
36.参照图1和图2,收集筒51的底部安装缓冲弹簧8,缓冲弹簧8的另一端与收集盒53的底部相接触。收集筒51的底部安装有重力感应器9,收集筒51的一侧安装有信号发送器。重力感应器9与信号发送器电连接。重力感应器9用于与收集盒53的底部相接触,从而能够通过收集盒53的重量触发重力感应器9,此时重力感应器9控制信号发送器启动。城市内设置有控制室,控制室用于接收信号发送器启动所发送的信号,并向工作人员发出预警,从而能够通知工作人员前往对应地点对收集盒53内的垃圾进行收集清理,进而可以实现对多个地点的收集盒53内收集杂物进行集中调控,不需要时刻对收集盒53内杂物的收集情况进行检查,实现对系统的智能化控制管理。
37.参照图1和图2,收集盒53的侧壁安装有多个缓速滑轮10,收集筒51的侧壁沿竖直方向开设有多个导向槽11,多个缓速滑轮10分别与多个导向槽11滑移配合。从而能够在收集盒53下落的过程中,对收集盒53的下落速度进行缓速,对收集盒53起到保护的作用。
38.本技术实施例一体化泵站式智能基坑排水系统的实施原理为:工作时,驱动电机驱动侧板2转动对化泵站内部水中漂浮的杂物进行清理,使得杂
物沿导向板52进入收集筒51内的收集盒53中,并通过升降组件7对收集盒53内收集的杂物进行清理,从而能够减少漂浮类垃圾对一体化泵站造成堵塞的情况发生,并通过信号发送器与控制室的配合设置,实现对多个地点的收集盒53内垃圾进行智能化管理的作用。
39.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1