一种基于实时位姿的挖掘机势能回收系统
1.本发明涉及挖掘机技术领域,特别涉及一种基于实时位姿的挖掘机势能回收系统。
背景技术:
2.挖掘机是一种使用铲斗挖掘高于或低于承机面的土壤、煤、泥沙或者经过预松后的土壤和岩石等物料,并装入运输车辆或卸至堆料场的土方机械,目前已经成为工程建设中最主要的工程机械之一。
3.液压挖掘机工作效率高,适用范围广泛,在工程上得到广泛的使用,但其能耗高、排放差的问题一直没有得到有效的解决,在当前“双碳”背景下,对挖掘机的节能减排研究愈发重要。
4.在液压挖掘机工作过程中,工作装置需要频繁上升和下降,在上升至高位时势能提高,而在下降时,为防止下降速度过快,通常设置节流调速回路,节流调速过程中大量的势能被转化为热能,导致系统温度快速升高,降低了液压系统的性能,同时还会增大散热功率。
5.目前针对挖掘机势能回收控制装置的研究,多直接采用电磁换向阀或比例换向阀来控制动臂动作、同时完成动臂势能的回收,然而挖掘机工作环境和工况复杂,挖掘机工作过程中不同位姿下可回收的势能变化幅度大,势能回收的过程中并未对动臂可回收的势能进行有效的评估,无法最大化势能回收,势能回收效率低。
技术实现要素:
6.针对现有技术中存在的不足,本发明提供了一种基于实时位姿的挖掘机势能回收系统,基于挖掘机的实时位姿数据,对挖掘机动臂的可回收势能进行评估进而选择适当的蓄能器,提高挖掘机动臂势能的回收效率。
7.本发明是通过以下技术手段实现上述技术目的的。
8.一种基于实时位姿的挖掘机势能回收系统,包括液压驱动模块、位姿识别控制模块和能量回收再利用模块;
9.所述液压驱动模块包括液压动力单元,动臂油缸、斗杆油缸、铲斗油缸、第一三位四通电磁换向阀、第二三位四通电磁换向阀和第三三位四通电磁换向阀,所述液压动力单元通过第一三位四通电磁换向阀与动臂油缸无杆腔连通,用于控制动臂工作;所述液压动力单元通过第二三位四通电磁换向阀与斗杆油缸无杆腔连通,用于控制斗杆工作;所述液压动力单元通过第三三位四通电磁换向阀与铲斗油缸无杆腔连通,用于控制铲斗工作;
10.所述能量回收再利用模块包括第一二位二通电磁阀、第二二位二通电磁阀、第三二位二通电磁阀、第四二位二通电磁阀、二位三通电磁阀、第一液压蓄能器、第二液压蓄能器、第三液压蓄能器;
11.所述第一液压蓄能器通过第一二位二通电磁阀分别与二位三通电磁阀和第四二
位二通电磁阀连通;所述第二液压蓄能器通过第二二位二通电磁阀分别与二位三通电磁阀和第四二位二通电磁阀连通;所述第三液压蓄能器通过第三二位二通电磁阀分别与二位三通电磁阀和第四二位二通电磁阀连通;所述动臂油缸无杆腔通过第一三位四通电磁换向阀与二位三通电磁阀连通;所述第四二位二通电磁阀与液压动力单元连通;
12.所述位姿识别控制模块包括控制台、第一压力传感器、第二压力传感器、第三压力传感器、第四压力传感器、第五压力传感器、第六压力传感器、动臂倾角传感器、斗杆倾角传感器和铲斗倾角传感器;所述第一压力传感器用于测量动臂油缸工作时无杆腔的压力;所述第二压力传感器用于测量第一液压蓄能器的腔内压力;所述第三压力传感器用于测量第二液压蓄能器的腔内压力;所述第四压力传感器用于测量第三液压蓄能器的腔内压力;所述第五压力传感器由于测量挖掘机斗杆油缸无杆腔内压力;所述第六压力传感器用于测量挖掘机铲斗油缸无杆腔内压力;所述动臂倾角传感器安装在挖掘机动臂油缸上,用于测量挖掘机工作时动臂油缸的水平倾角;所述斗杆倾角传感器安装在挖掘机斗杆油缸上,用于测量挖掘机工作时斗杆油缸的水平倾角,所述铲斗倾角传感器安装在挖掘机铲斗油缸上,用于测量挖掘机工作时铲斗油缸的水平倾角;
13.所述控制台选择性的控制第一三位四通电磁换向阀,第一二位二通电磁阀、第二二位二通电磁阀、第三二位二通电磁阀、二位三通电磁阀使得挖掘机动臂油缸无杆腔与第一液压蓄能器、第二液压蓄能器、第三液压蓄能器连通,用于回收挖掘机不同位姿动臂下降过程中的释放的重力势能;所述控制台选择性的控制第一二位二通电磁阀、第二二位二通电磁阀、第三二位二通电磁阀、第四二位二通电磁阀的连通,控制第一液压蓄能器、第二液压蓄能器、第三液压蓄能器与液压动力单元进油口的连通,用于提供辅助动力。
14.进一步,所述液压动力单元包括发动机、液压泵、过滤器、第一止回阀和液压油箱;所述发动机用于驱动液压泵;所述液压泵进油口与液压油箱之间依次设有过滤器和第一止回阀;所述液压泵出油口安装溢流阀。
15.进一步,所述第一三位四通电磁换向阀的接口包括第一p口、第一t口、第一a口和第一b口,所述第一p口与液压动力单元连通,所述第一a口与动臂油缸无杆腔连通,所述第一b口与动臂油缸有杆腔连通,所述第一t口与二位三通电磁阀连通;所述第二三位四通电磁换向阀的接口包括第二p口、第二t口、第二a口和第二b口,所述第二p口与液压动力单元连通,所述第二a口与斗杆油缸无杆腔连通,所述第二b口与斗杆油缸有杆腔连通,所述第二t口与液压油箱连通;所述第三三位四通电磁换向阀的接口包括第三p口、第三t口、第三a口和第三b口,所述第三p口与液压动力单元连通,所述第三a口与铲斗油缸无杆腔连通,所述第三b口与铲斗油缸有杆腔连通,所述第三t口与液压油箱连通。
16.进一步,所述液压驱动模块还包括第一节流阀、第二节流阀和第三节流阀,所述第一节流阀位于第一a口与动臂油缸无杆腔之间,用于控制动臂油缸的工作速度;所述第二节流阀位于第二a口与斗杆油缸无杆腔之间,用于控制斗杆油缸的工作速度;所述第三节流阀位于第三a口与铲斗油缸无杆腔之间,用于控制铲斗油缸的工作速度。
17.进一步,当控制台控制动臂油缸收缩时,
18.若e≤e1且p1<p时,所述控制台控制第一二位二通电磁换向阀的sb2电磁线圈、第一二位二通电池换向阀和第五二位二通电磁换向阀得电,用于将动臂油缸下降过程的势能回收到第一液压蓄能器内;
19.若e1<e≤e2且p2<p时,所述控制台控制第一二位二通电磁换向阀的sb2电磁线圈、第二二位二通电磁阀和二位三通电磁阀得电,用于将动臂油缸下降过程的势能回收到第二液压蓄能器内;
20.若e2<e≤e3且p3<p时,所述控制台控制第一二位二通电磁换向阀的sb2电磁线圈、第三二位二通电磁阀和二位三通电磁阀得电,用于将动臂油缸下降过程的势能回收到第三液压蓄能器内;
21.其中
22.e=ψ(θ1,θ2,θ3,p),
23.式中θ1为动臂动臂倾角传感器的测量值;θ2为斗杆倾角传感器的测量值;θ3为铲斗倾角传感器的测量值;p为第一压力传感器的测量值;e表示当前位姿下挖掘机动臂最大可回收势能;e1为第一液压蓄能器的最大可回收能量;e2为第二液压蓄能器的最大可回收能量;e3为第三液压蓄能器的最大可回收能量,计算公式如下
[0024][0025][0026][0027]
式中:
[0028]
p1为第一液压蓄能器的腔内压力,通过第二压力传感器测量;
[0029]
p2为第二液压蓄能器的腔内压力,通过第三压力传感器测量;
[0030]
p3为第三液压蓄能器的腔内压力,通过第四压力传感器测量;
[0031]
p
01
为第一液压蓄能器的初始压力;v
01
为第一液压蓄能器的初始体积;
[0032]
p
02
为第二液压蓄能器的初始压力;v
02
为第二液压蓄能器的初始体积;
[0033]
p
03
为第三液压蓄能器的初始压力;v
03
为第三液压蓄能器的初始体积;
[0034]
p
max-1
为第一液压蓄能器的最大腔内压力,p
max-2
为第二液压蓄能器的最大腔内压力,p
max-3
为第三液压蓄能器的最大腔内压力;n为含义绝热指数。
[0035]
进一步,当控制台控制动臂油缸伸长时,
[0036]
若max(p1,p2,p3)=p1且p1>p时,所述控制台选择性的控制第一二位二通电磁阀、第四二位二通电磁阀、第一三位四通电磁换向阀的sb1电磁线圈得电,使得第一液压蓄能器与液压泵进油口连通,通过释放储存在第一液压蓄能器内的能量,用于提供辅助动力;
[0037]
若max(p1,p2,p3)=p2且p2>p时,所述控制台选择性的控制第二二位二通电磁阀、第四二位二通电磁阀、第一三位四通电磁换向阀的sb1电磁线圈得电,使得第二液压蓄能器与液压泵进油口连通,通过释放储存在第二液压蓄能器内的能量,用于提供辅助动力;
[0038]
若max(p1,p2,p3)=p3且p3>p时,所述控制台选择性的控制第三二位二通电磁阀、
第四二位二通电磁阀、第一三位四通电磁换向阀的sb1电磁线圈得电,使得第三液压蓄能器与液压泵进油口连通,通过释放储存在第三液压蓄能器内的能量,用于提供辅助动力。
[0039]
进一步,当控制台控制斗杆油缸伸长时,
[0040]
若max(p1,p2,p3)=p1且p1>p4时,所述控制台选择性的控制第一二位二通电磁阀、第四二位二通电磁阀、第二三位四通电磁换向阀的sb1电磁线圈得电,使得第一液压蓄能器与液压泵进油口连通,通过释放储存在第一液压蓄能器内的能量,用于提供辅助动力;式中:p4为挖掘机斗杆油缸无杆腔压力,通过第五压力传感器测量;
[0041]
若max(p1,p2,p3)=p2且p2>p4时,所述控制台选择性的控制第二二位二通电磁阀、第四二位二通电磁阀、第二三位四通电磁换向阀的sb1电磁线圈得电,使得第二液压蓄能器与液压泵进油口连通,通过释放储存在第二液压蓄能器内的能量,用于提供辅助动力;
[0042]
若max(p1,p2,p3)=p3且p3>p4时,所述控制台选择性的控制第三二位二通电磁阀、第四二位二通电磁阀、第二三位四通电磁换向阀的sb1电磁线圈得电,使得第三液压蓄能器与液压泵进油口连通,通过释放储存在第三液压蓄能器内的能量,用于提供辅助动力。
[0043]
进一步,当控制台控制铲斗油缸伸长时,
[0044]
若max(p1,p2,p3)=p1且p1>p5时,所述控制台选择性的控制第一二位二通电磁阀、第四二位二通电磁阀、第三三位四通电磁换向阀的sb1电磁线圈得电,使得第一液压蓄能器与液压泵进油口连通,通过释放储存在第一液压蓄能器内的能量,用于提供辅助动力;式中:p5为挖掘机铲斗油缸无杆腔压力,通过第六压力传感器测量;
[0045]
若max(p1,p2,p3)=p2且p2>p5时,所述控制台选择性的控制第二二位二通电磁阀、第四二位二通电磁阀、第三三位四通电磁换向阀的sb1电磁线圈得电,使得第二液压蓄能器与液压泵进油口连通,通过释放储存在第二液压蓄能器内的能量,用于提供辅助动力;
[0046]
若max(p1,p2,p3)=p3且p3>p5时,所述控制台选择性的控制第三二位二通电磁阀、第四二位二通电磁阀、第三三位四通电磁换向阀的sb1电磁线圈得电,使得第三液压蓄能器与液压泵进油口连通,通过释放储存在第三液压蓄能器内的能量,用于提供辅助动力。
[0047]
本发明的有益效果在于:
[0048]
1.本发明所述的基于实时位姿的挖掘机势能回收系统,能缓解传统挖掘机高油耗高排放的问题,在挖掘机动臂下降过程中回收动臂的势能、并在挖掘机动臂、斗杆、铲斗工作需要时释放回收的势能,提高了挖掘机能量的利用效率,降低了挖掘机的使用成本。
[0049]
2.本发明所述的基于实时位姿的挖掘机势能回收系统,通过传感器对挖掘机的动臂最大可回收势能进行实时估计,进而选择合适的蓄能器对动臂势能进行回收,提高动臂势能的回收效率。
附图说明
[0050]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,显而易见地还可以根据这些附图获得其他的附图。
[0051]
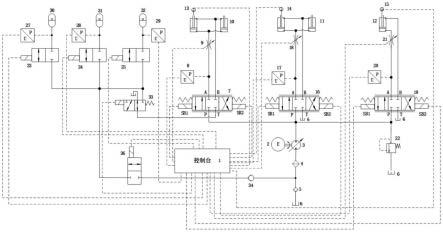
图1为本发明所述的基于实时位姿的挖掘机势能回收系统的原理图。
[0052]
图2为本发明所述的基于实时位姿的挖掘机势能回收系统倾角传感器安装位置示
意图。
[0053]
图中:
[0054]
1-控制台;2-发动机;3-液压泵;4-过滤器;5-第一止回阀;6-液压油箱;7-第一三位四通电磁换向阀;8-第一压力传感器;9-第一节流阀;10-动臂油缸;11-斗杆油缸;12-铲斗油缸;13-动臂倾角传感器;14-斗杆倾角传感器;15-铲斗倾角传感器;16-第二三位四通电磁换向阀;17-第五压力传感器;18-第二节流阀;19-第三三位四通电磁换向阀;20-第六压力传感器;21-第三节流阀;22-溢流阀;23-第一二位二通电磁阀;24-第二二位二通电磁阀;25-第三二位二通电磁阀;26-第四二位二通电磁阀;27-第二压力传感器;28-第三压力传感器;29-第四压力传感器;30-第一液压蓄能器;31-第二液压蓄能器;32-第三液压蓄能器;33-二位三通电磁阀;34-第二止回阀。
具体实施方式
[0055]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0056]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0057]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“轴向”、“径向”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0058]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0059]
如图1所示,本发明所述的基于实时位姿的挖掘机势能回收系统,包括液压驱动模块,位姿识别控制模块,能量回收再利用模块;
[0060]
所述液压驱动模块包括液压动力单元,动臂油缸10、斗杆油缸11、铲斗油缸12、第一三位四通电磁换向阀7、第二三位四通电磁换向阀16、第三三位四通电磁换向阀19、第一节流阀9、第二节流阀18和第三节流阀22,所述液压动力单元依次通过第一三位四通电磁换向阀7、第一节流阀9与动臂油缸10无杆腔连通,用于控制动臂工作;所述液压动力单元依次通过第二三位四通电磁换向阀16、第二节流阀18与斗杆油缸11无杆腔连通,用于控制斗杆工作;所述液压动力单元依次通过第三三位四通电磁换向阀19、第三节流阀21与铲斗油缸12无杆腔连通,用于控制铲斗工作;所述第一节流阀9、第二节流阀18、第三节流阀22分别用
于控制动臂油缸10、斗杆油缸11、铲斗油缸12的移动速度;
[0061]
所述液压动力单元包括发动机2、液压泵3、过滤器4、止回阀5、液压油箱6;所述发动机2用于驱动液压泵3;所述液压泵3进油口与液压油箱6之间依次设有过滤器4、第一止回阀5。
[0062]
所述能量回收再利用模块包括第二止回阀34、第一二位二通电磁阀23、第二二位二通电磁阀24、第三二位二通电磁阀2、第四二位二通电磁阀26、二位三通电磁阀33、第一液压蓄能器30、第二液压蓄能器31和第三液压蓄能器32;所述第一液压蓄能器30通过第一二位二通电磁阀23分别与二位三通电磁阀33和第四二位二通电磁阀26连通;所述第二液压蓄能器31通过第二二位二通电磁阀24分别与二位三通电磁阀33和第四二位二通电磁阀26连通;所述第三液压蓄能器32通过第三二位二通电磁阀25分别与二位三通电磁阀33和第四二位二通电磁阀26连通;所述动臂油缸10无杆腔通过第一三位四通电磁换向阀7与二位三通电磁阀33连通;所述第四二位二通电磁阀26与液压动力单元连通;所述第一二位二通电磁阀23用于控制第一液压蓄能器30的开关;所述第二二位二通电磁阀24用于控制第二液压蓄能器31的开关;所述第三二位二通电磁阀25用于控制第三液压蓄能器32的开关;所述第四二位二通电磁阀26与液压动力单元之间设有第二止回阀34。
[0063]
如图1和图2所示,所述位姿识别控制模块包括控制台1、第一压力传感器8、第二压力传感器27、第三压力传感器28、第四压力传感器29、第五压力传感器17、第六压力传感器20、动臂倾角传感器13、斗杆倾角传感器14和铲斗倾角传感器15;所述第一压力传感器8用于测量动臂油缸10工作时无杆腔的压力;所述第二压力传感器27用于测量第一液压蓄能器30的腔内压力;所述第三压力传感器28用于测量第二液压蓄能器31的腔内压力;所述第四压力传感器29用于测量第三液压蓄能器32的腔内压力;所述第五压力传感器17由于测量挖掘机斗杆油缸无杆腔内压力;所述第六压力传感器20用于测量挖掘机铲斗油缸无杆腔内压力;所述动臂倾角传感器13安装在挖掘机动臂油缸上,用于测量挖掘机工作时动臂油缸10的水平倾角;所述斗杆倾角传感器14安装在挖掘机斗杆油缸上,用于测量挖掘机工作时斗杆油缸11的水平倾角,所述铲斗倾角传感器15安装在挖掘机铲斗油缸上,用于测量挖掘机工作时铲斗油缸12的水平倾角。
[0064]
所述控制台1选择性的控制第一三位四通电磁换向阀7,第一二位二通电磁阀23、第二二位二通电磁阀24、第三二位二通电磁阀25、二位三通电磁阀33使得挖掘机动臂油缸10无杆腔与第一液压蓄能器30、第二液压蓄能器31、第三液压蓄能器32连通,用于回收挖掘机不同位姿动臂下降过程中的释放的重力势能;所述控制台1选择性的控制第一二位二通电磁阀23、第二二位二通电磁阀24、第三二位二通电磁阀25、第四二位二通电磁阀26的连通,控制第一液压蓄能器30、第二液压蓄能器31、第三液压蓄能器32与液压动力单元进油口的连通,用于提供辅助动力。
[0065]
所述第一三位四通电磁换向阀7的接口包括第一p口、第一t口、第一a口和第一b口,所述第一p口与液压动力单元连通,所述第一a口与动臂油缸10无杆腔连通,所述第一b口与动臂油缸10有杆腔连通,所述第一t口与二位三通电磁阀33连通;所述第二三位四通电磁换向阀16的接口包括第二p口、第二t口、第二a口和第二b口,所述第二p口与液压动力单元连通,所述第二a口与斗杆油缸11无杆腔连通,所述第二b口与斗杆油缸11有杆腔连通,所述第二t口与液压油箱6连通;所述第三三位四通电磁换向阀19的接口包括第三p口、第三t
口、第三a口和第三b口,所述第三p口与液压动力单元连通,所述第三a口与铲斗油缸12无杆腔连通,所述第三b口与铲斗油缸12有杆腔连通,所述第三t口与液压油箱6连通。位于第一a口与动臂油缸10无杆腔之间,用于控制动臂油缸10的工作速度;所述第二节流阀18位于第二a口与斗杆油缸11无杆腔之间,用于控制斗杆油缸11的工作速度;所述第三节流阀22位于第三a口与铲斗油缸12无杆腔之间,用于控制铲斗油缸12的工作速度。
[0066]
回收过程:
[0067]
当控制台1控制动臂油缸10收缩使动臂下降时,分为三种情况:
[0068]
若e≤e1且p1<p时,所述控制台1控制第一二位二通电磁换向阀7的sb2电磁线圈、第一二位二通电池换向阀23和第五二位二通电磁换向阀33得电,用于将动臂油缸10下降过程的势能回收到第一液压蓄能器30内;
[0069]
若e1<e≤e2且p2<p时,所述控制台1控制第一二位二通电磁换向阀7的sb2电磁线圈、第二二位二通电磁阀24和二位三通电磁阀33得电,用于将动臂油缸10下降过程的势能回收到第二液压蓄能器31内;
[0070]
若e2<e≤e3且p3<p时,所述控制台1控制第一二位二通电磁换向阀7的sb2电磁线圈、第三二位二通电磁阀25和二位三通电磁阀33得电,用于将动臂油缸10下降过程的势能回收到第三液压蓄能器32内;
[0071]
其中
[0072]
e=ψ(θ1,θ2,θ3,p),
[0073]
式中θ1为动臂动臂倾角传感器13的测量值;θ2为斗杆倾角传感器14的测量值;θ3为铲斗倾角传感器15的测量值;p为第一压力传感器8的测量值;e表示当前位姿下挖掘机动臂最大可回收势能;e1为第一液压蓄能器30的最大可回收能量;e2为第二液压蓄能器31的最大可回收能量;e3为第三液压蓄能器32的最大可回收能量,计算公式如下
[0074][0075][0076][0077]
式中:
[0078]
p1为第一液压蓄能器30的腔内压力,通过第二压力传感器27测量;
[0079]
p2为第二液压蓄能器31的腔内压力,通过第三压力传感器28测量;
[0080]
p3为第三液压蓄能器32的腔内压力,通过第四压力传感器29测量;
[0081]
p
01
为第一液压蓄能器30的初始压力;v
01
为第一液压蓄能器30的初始体积;
[0082]
p
02
为第二液压蓄能器31的初始压力;v
02
为第二液压蓄能器31的初始体积;
[0083]
p
03
为第三液压蓄能器32的初始压力;v
03
为第三液压蓄能器32的初始体积;
[0084]
p
max-1
为第一液压蓄能器30的最大腔内压力,p
max-2
为第二液压蓄能器31的最大腔内压力,p
max-3
为第三液压蓄能器32的最大腔内压力;n为含义绝热指数。
[0085]
当控制台1控制动臂油缸10伸长使动臂上升时,分为三种情况:
[0086]
若max(p1,p2,p3)=p1且p1>p时,所述控制台1选择性的控制第一二位二通电磁阀23、第四二位二通电磁阀26、第一三位四通电磁换向阀7的sb1电磁线圈得电,使得第一液压蓄能器30与液压泵3进油口连通,通过释放储存在第一液压蓄能器30内的能量,用于提供辅助动力;
[0087]
若max(p1,p2,p3)=p2且p2>p时,所述控制台1选择性的控制第二二位二通电磁阀24、第四二位二通电磁阀26、第一三位四通电磁换向阀7的sb1电磁线圈得电,使得第二液压蓄能器31与液压泵3进油口连通,通过释放储存在第二液压蓄能器31内的能量,用于提供辅助动力;
[0088]
若max(p1,p2,p3)=p3且p3>p时,所述控制台1选择性的控制第三二位二通电磁阀25、第四二位二通电磁阀26、第一三位四通电磁换向阀7的sb1电磁线圈得电,使得第三液压蓄能器32与液压泵3进油口连通,通过释放储存在第三液压蓄能器32内的能量,用于提供辅助动力。
[0089]
当控制台1控制斗杆油缸11伸长时,分为三种情况:
[0090]
若max(p1,p2,p3)=p1且p1>p4时,所述控制台1选择性的控制第一二位二通电磁阀23、第四二位二通电磁阀26、第二三位四通电磁换向阀16的sb1电磁线圈得电,使得第一液压蓄能器30与液压泵3进油口连通,通过释放储存在第一液压蓄能器30内的能量,用于给液压泵进口提供辅助动力;式中:p4为挖掘机斗杆油缸11无杆腔压力,通过第五压力传感器17测量;
[0091]
若max(p1,p2,p3)=p2且p2>p4时,所述控制台1选择性的控制第二二位二通电磁阀24、第四二位二通电磁阀26、第二三位四通电磁换向阀16的sb1电磁线圈得电,使得第二液压蓄能器31与液压泵3进油口连通,通过释放储存在第二液压蓄能器31内的能量,用于给液压泵进口提供辅助动力;
[0092]
若max(p1,p2,p3)=p3且p3>p4时,所述控制台1选择性的控制第三二位二通电磁阀25、第四二位二通电磁阀26、第二三位四通电磁换向阀16的sb1电磁线圈得电,使得第三液压蓄能器32与液压泵3进油口连通,通过释放储存在第三液压蓄能器32内的能量,用于给液压泵进口提供辅助动力。
[0093]
当控制台1控制铲斗油缸12伸长时,分为三种情况:
[0094]
若max(p1,p2,p3)=p1且p1>p5时,所述控制台1选择性的控制第一二位二通电磁阀23、第四二位二通电磁阀26、第三三位四通电磁换向阀19的sb1电磁线圈得电,使得第一液压蓄能器30与液压泵3进油口连通,通过释放储存在第一液压蓄能器30内的能量,用于给液压泵进口提供辅助动力;式中:p5为挖掘机铲斗油缸无杆腔12压力,通过第六压力传感器20测量;
[0095]
若max(p1,p2,p3)=p2且p2>p5时,所述控制台1选择性的控制第二二位二通电磁阀24、第四二位二通电磁阀26、第三三位四通电磁换向阀19的sb1电磁线圈得电,使得第二液压蓄能器31与液压泵3进油口连通,通过释放储存在第二液压蓄能器31内的能量,用于给液压泵进口提供辅助动力;
[0096]
若max((p1,p2,p3)=p3且p3>p5时,所述控制台1选择性的控制第三二位二通电磁阀25、第四二位二通电磁阀26、第三三位四通电磁换向阀19的sb1电磁线圈得电,使得第三液压蓄能器32与液压泵3进油口连通,通过释放储存在第三液压蓄能器32内的能量,用于给液压泵进口提供辅助动力。
[0097]
应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
[0098]
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施例的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施例或变更均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1