一种智能化便携式可变能连续动力触探设备的制作方法
1.本发明涉及工程检测设备技术领域,具体涉及一种智能化便携式可变能连续动力触探设备。
背景技术:
2.静力触探是指利用压力装置将触探设备压入试验土体中,通过测量系统测量土体的贯穿阻力,从而可以确定土体的一些基本物理力学性质,如土体的变形模量、土体的许用承载力等。静力触探的加压方式有三种,机械式、液压式和手动式。通过静力贯入试验得到的计算指标,可以确定土体的天然地基承载力。静力贯入法的贯入机理不同于地基的强度和变形机理,因此不常使用。
3.现有技术中的一些触探设备,一般包括探柄、力传感器、探杆和探头,力传感器设于所述探柄内,探杆与探柄连接,探头和探杆连接。通过向探柄施加冲击力,冲击力通过探杆施加于探头上,探头在冲击力的作用下插入土壤中。通过探柄处的力传感器检测探柄所受冲击力,从而大致测量探头贯穿土壤时,土壤向探头施加的反作用力,从而大致测算土壤的力学性能。
4.但现有的触探设备,在锤击探柄时,探杆容易出现偏斜,容易导致探杆与土壤接触,两者接触会产生摩擦阻力,土壤对探杆的摩擦力会对该土壤的力学性质测算产生影响,从而导致测量结果的精确性不高。
技术实现要素:
5.本发明的目的是为了克服现有技术中的问题,提供一种智能化便携式可变能连续动力触探设备,能够在探杆出现偏斜时,既土壤与探杆接触时,土壤对探杆的摩擦力也不会对该土壤的力学性质检测产生影响,从而保证本设备测量结果的精确性。
6.本发明提供了一种智能化便携式可变能连续动力触探设备,包括探柄、探杆,还包括:
7.探头基体,与所述探杆连接,所述探头基体设有内腔;
8.力传感器,设于所述内腔内;
9.探头锥体,顶部设有顶压块,所述顶压块与所述内腔侧壁滑动连接,顶压块与所述力传感器相抵接;
10.控制器,与所述力传感器电连接,所述力传感器用于检测顶压块受到的实时压力,控制器电连接有显示器,所述控制器用于控制显示器显示所述实时压力。
11.较佳地,还包括探杆纠偏机构,所述探杆纠偏机构包括框架、十字轴承机构、电动滑轨机构和水平度测量仪,所述十字轴承机构一端连接有锤击机构,十字轴承机构另一端与所述框架连接,所述电动滑轨机构的滑块通过球铰与锤击机构连接,电动滑轨机构的滑轨连接有安装盘,所述安装盘通过轴承连接于所述框架上,安装盘顶端还连接有第一动力装置,所述水平度测量仪设于所述探柄上,水平度测量仪用于检测探柄的实时水平度,所述
控制器与所述电动滑轨机构、第一动力装置、水平度测量仪和电源装置均电连接,控制器电连接有数据处理器,所述数据处理器用于根据探柄的实时水平度计算探杆的实时偏斜量,控制器根据所述实时偏斜量控制电动滑轨机构和第一动力装置动作。
12.较佳地,所述安装盘与框架之间设有随动架,所述随动架上设有丝母套和滑套,所述框架上设有竖直方向设置的丝杆和滑杆,所述丝杆与所述丝母套螺纹连接,所述滑套与所述滑杆滑动连接,安装盘通过轴承连接于随动架上,所述十字轴承机构与所述框架连接。
13.较佳地,所述随动架上设有连杆,所述连杆上设有环套,所述环套内设有橡胶圈,所述探杆与所述橡胶圈的内壁滑动连接。
14.较佳地,所述丝杆上连接有第二动力装置,所述第二动力装置与所述控制器电连接。
15.较佳地,所述滑块与锤击机构之间设有液压缸,所述液压缸的缸体与所述锤击机构固连,所述液压缸的活塞与所述滑块请过球铰连接,所述缸体连通有液控回路。
16.较佳地,所述锤击机构与所述控制器电连接,通过控制器控制锤击机构的锤击力度。
17.较佳地,所述框架为可拆卸式框架。
18.较佳地,所述控制器电连接有射频信号收发器。
19.与现有技术相比,本发明的有益效果是:本发明的一种智能化便携式可变能连续动力触探设备,能够在探杆出现偏斜时,既土壤与探杆接触时,土壤对探杆的摩擦力也不会对该土壤的力学性质检测产生影响,从而保证本设备测量结果的精确性。
20.本设备能够在探杆出现轻微偏斜时,控制锤击机构的位置和姿态,从而控制锤击机构对探杆施加力方向,使探杆所受冲击力的方向与探杆的轴向重合,从而能够防止探杆进一步偏斜。通过设置随动架,能够抵消滑块与探柄之间高度差的变化量,从而保持滑块与探柄的竖直高度差始终相对固定,从而降低系统的工作误差。通过设置连杆、环套和橡胶圈,能够对探杆起到辅助稳定的作用,从而进一步防止探杆发生偏斜。通过设置第二动力装置,利用控制器控制第二动力装置驱动丝杆运动,从而提升本装置的自动化程度,节省人力。通过设置液压缸,能防止锤击机构姿态在发生变动时,防止滑块的运动出现死点。通过控制器控制锤击机构的锤击力度,从而自动调节探杆和探头基体受到的冲击能量,进而满足不同工况的使用要求。通过将框架设为可拆卸式框架,能够提升本设备的便携性,方便本设备的转运。
附图说明
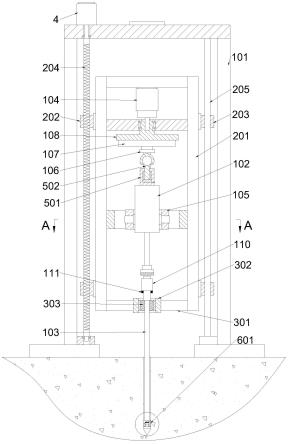
21.图1为本发明的结构示意图;
22.图2为本发明a-a面的结构示意图;
23.图3为本发明探杆处的结构示意图;
24.图4为本发明力传感器处的结构示意图。
25.附图标记说明:
26.101.框架,102.锤击机构,103.探杆,104.第一动力装置,105.十字轴承机构,106.滑块,107.滑轨,108.安装盘,110.探柄,111.水平度测量仪,201.随动架,202.丝母套,203.滑套,204.丝杆,205.滑杆,301.连杆,302.环套,303.橡胶圈,4.第二动力装置,501.缸体,
502.活塞,601.探头基体,602. 力传感器,603.探头锥体,604.顶压块。
具体实施方式
27.下面结合附图1-4,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.实施例1:
29.如图3和4所示,本发明提供的一种智能化便携式可变能连续动力触探设备,包括探柄110、探杆103,还包括:探头基体601、探头锥体603和控制器,探头基体601与所述探杆103连接,所述探头基体601设有内腔;力传感器602设于所述内腔内;探头锥体603,顶部设有顶压块604,所述顶压块 604与所述内腔侧壁滑动连接,顶压块604与所述力传感器602相抵接;控制器与所述力传感器602电连接,所述力传感器602用于检测顶压块604受到的实时压力,控制器电连接有显示器,所述控制器用于控制显示器显示所述实时压力。
30.现简述实施例1的工作原理:
31.将本设备的探头锥体603对准探测点,然后通过锤击探柄110,冲击力通过探杆103传递至探头基体601,探头基体601通过力传感器602传递至顶压块604,然后通过顶压块604直接作用于探头锥体603上,探头锥体603在受力后伸入探测点的土壤内,探测点的土壤对探头椎体施加反作用力,反作用力通过顶压块604直接作用于所述力传感器602上,力传感器602直接检测顶压块604受到的实时压力,该实时压力与土壤对探头椎体施加反作用力大小相等,然后控制控制显示器显示所述实时压力显示,使用者结合该实时压力以及探头基体601伸入土壤的深度,能够精确推算该探测点土壤的力学性质。由于力传感器602直接检测挤压土壤的探头椎体所受的反作用力,因此,即使探杆103出现偏斜时,既土壤与探杆103接触时,土壤对探杆103的摩擦力也不会对该土壤的力学性质检测产生影响,从而保证本设备测量结果的精确性。
32.本发明的一种智能化便携式可变能连续动力触探设备,能够在探杆103 出现偏斜时,既土壤与探杆103接触时,土壤对探杆103的摩擦力也不会对该土壤的力学性质检测产生影响,从而保证本设备测量结果的精确性。
33.实施例2:
34.在实施例1的基础上,为了能够在探杆103出现轻微偏斜时,使探杆103 所受冲击力的方向与探杆103的轴向重合,从而防止探杆103进一步偏斜。
35.如图1和2所示,其中,还包括探杆纠偏机构,所述探杆纠偏机构包括框架101、十字轴承机构105、电动滑轨机构和水平度测量仪111,所述十字轴承机构105一端连接有锤击机构102,十字轴承机构105另一端与所述框架 101连接,所述电动滑轨机构的滑块106通过球铰与锤击机构102连接,电动滑轨机构的滑轨107连接有安装盘108,所述安装盘108通过轴承连接于所述框架101上,安装盘108顶端还连接有第一动力装置104,所述水平度测量仪 111设于所述探柄110上,水平度测量仪111用于检测探柄110的实时水平度,所述控制器与所述电动滑轨机构、第一动力装置104、水平度测量仪111 和电源装置均电连接,控制器电连接有数据处理器,所述数据处理器用于根据探柄110的实时水平度计算探杆103的实时偏斜量,控制器根据所述实时偏斜量控制电动滑轨机构和第一动力装置104动作。
36.在对土壤的力学性能进行触探时,将框架101立于需要进行触探位置,将探杆103和探头锥体603插进土壤后,通过锤击机构102的锤头对探柄110 进行锤击,锤击机构102的锤击力度可控。与此同时,力传感器602实时监测土壤的力学性能。当探杆103出现轻微偏斜时,位于探柄110上的水平度测量仪111能够实时测量探柄110的延水平面内x轴方向和y轴方向的水平度,所述x轴方向和y轴方向相互垂直,由于探柄110连接于探杆103顶端,因此,当探杆103出现偏斜后,探柄110沿x轴方向和y轴方向的水平度发生变化。因此,数据处理器能够根据探柄110x轴方向和y轴方向的水平度的变化量推算出探杆103顶端的实时偏斜量。当探杆103向x轴的正方向或y轴正方向偏斜时,两者的合成偏斜量的值为l,合成偏斜量的方向为a
→
,由于滑块106距探柄110位置的竖直高度差相对固定,控制器根据相似三角原理计算出要使锤击机构102锤头的运动放向与探杆103轴向重合时,滑块106所要滑动的距离h,然后控制电动滑轨机构的滑块106滑动的值为h,此时,锤击机构102底端由于与十字轴承机构105连接,因此,锤击机构102的轴向发生偏转,然后控制第一动力装置109驱动安装盘108转动相应角度,从而使锤头运动的方向与探杆103的轴向重合,锤头向探柄110施加的冲击力的方向与探杆103的轴向重合,从而能够防止探杆103进一步偏斜,从而进一步避免土壤对探杆的摩擦力导致对该土壤的力学性质检测结果失准。
37.实施例3:
38.在实施例2的基础上,为了使滑块106能够跟随探柄110向下运动,从而在探柄110向下运动时,保持滑块106与探柄110的竖直高度差始终相对固定,从而降低系统的工作误差。
39.如图1和2所示,其中,所述安装盘108与框架101之间设有随动架 201,所述随动架201上设有丝母套202和滑套203,所述框架101上设有竖直方向设置的丝杆204和滑杆205,所述丝杆204与所述丝母套202螺纹连接,所述滑套203与所述滑杆205滑动连接,安装盘108通过轴承连接于随动架201上,所述十字轴承机构105与所述框架101连接。
40.探柄110在受锤击机构102锤头冲击时,探杆103和探头基体601向下运动,此时,探柄110与滑块106沿竖直方向的高度差发生变化,此时控制器推算距离h时会出现误差。此时,通过转动所述丝杆204,从而驱动所述丝母套202向下运动一定距离,从而驱动随动架201向下运动一定距离,从而驱动安装盘108和电动滑轨107向下运动一定距离,从而抵消滑块106与探柄110 之间高度差的变化量,从而保持滑块106与探柄110的竖直高度差始终相对固定,从而降低系统的工作误差。
41.作为一种优选方案,如图1所示,其中,所述随动架201上设有连杆 301,所述连杆301上设有环套302,所述环套302内设有橡胶圈303,所述探杆103与所述橡胶圈303的内壁滑动连接。通过设置连杆301、环套302和橡胶圈303,能够对探杆103起到辅助稳定的作用,从而进一步防止探杆103发生偏斜。
42.作为一种优选方案,如图1所示,其中,所述丝杆204上连接有第二动力装置4,所述第二动力装置4与所述控制器电连接。通过设置第二动力装置 4,利用控制器控制第二动力装置4驱动丝杆204运动,从而提升本装置的自动化程度,节省人力。
43.作为一种优选方案,如图1所示,其中,所述滑块106与锤击机构102之间设有液压缸,所述液压缸的缸体501与所述锤击机构102固连,所述液压缸的活塞502与所述滑块106请过球铰连接,所述缸体501连通有液控回路。通过设置液压缸,当电动滑轨机构的滑块106
运动时,通过液控回路向缸体501 内通入或排除液压油,从而调整整个液压缸的长度,从而防止锤击机构102 姿态在发生变动时,防止滑块106的运动出现死点。
44.作为一种优选方案,如图1所示,其中,所述锤击机构102与所述控制器电连接,通过控制器控制锤击机构102的锤击力度。通过控制器控制锤击机构102的锤击力度,从而自动调节探杆103和探头基体601受到的冲击能量,进而满足不同工况的使用要求。
45.作为一种优选方案,如图1所示,其中,所述框架101为可拆卸式框架 101。通过将框架101设为可拆卸式框架101,能够提升本设备的便携性,方便本设备的转运。
46.作为一种优选方案,如图1所示,其中,所述控制器电连接有射频信号收发器。通过设置射频信号收发器,利用无线电信号进行信号传输,能够提升本设备的便携性。
47.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1