一种免电式机械记忆型气控延时真空界面阀控制器的制作方法
1.本发明属于环保技术领域,具体讲就是涉及一种免电式机械记忆型气控延时真空界面阀控制器。
背景技术:
2.真空排污技术广泛应用在高端商场,高档酒店,高配公厕以及农村排污系统中,大小便可通过真空便器排走;家庭使用的灰水可由灰水收集端,通过真空管道排走;农村户外灰水收集亦可走真空管道排走。
3.真空便器系统工作过程中,真空泵使整个系统形成真空,系统通往每个便器都必须有一个界面阀与真空系统隔离,界面阀一边是系统的真空,一边是马桶的常压。当冲便器时打开界面阀,依靠系统的负压与大气压之间的压差,将便器中的东西带走。
4.现有市场上的真空便器系统存在以下几个方面的缺陷:
5.(1)电路容易受潮,便器使用环境潮湿,导致便器使用过程因为受潮容易发生短路;(2)安装或使用不方便,便器安装需配有插座或需要经常充电才可正常使用,如果亏电,导致系统无法运行;(3)信号传递可靠性不准,浮球或者探针容易附着脏污,使得电信号误触发;(4)整体体积较大,不方便入户安装。
技术实现要素:
6.本发明的目的就是针对上述现有的真空便器系统存在的技术缺陷,提供一种免电式机械记忆型气控延时真空界面阀控制器,该控制器具有免电控,纯机械式的特点,同时具有延时和记忆的功能。
7.技术方案
8.为了实现上述技术目的,本发明提供一种免电式机械记忆型气控延时真空界面阀控制器,其特征在于:它包括气动感应单元,压差驱动单元,复位自锁单元,气路转换单元,压力控制单元和负压存储单元;
9.所述气动感应单元包括气动驱动组件,所述气动驱动组件在外力作用下能够驱动磁推杠杆组件运动,所述磁推杠杆组件运动能够带动磁推杆组件运动,所述磁推杆组件运动能够联动所述压差驱动单元中的感应磁体组件运动,所述感应磁体组件在磁推杆组件联动下运动能够解封所述压差驱动单元和负压存储单元之间关闭的气流孔二;
10.所述压差驱动单元和负压存储单元之间的气流孔二开启后,所述压差驱动单元中的压差启动组件在气压差的作用下推动轴向上运动,所述轴向上运动过程中能够封闭气路转换单元和压力控制单元之间的气流通道二,同时解封负压存储单元和气路转换单元之间的气流通道一,所述负压存储单元和气路转换单元之间的气流通道一解封后,所述复位自锁单元中的锁位轴组件在气压差的作用下向上运动,所述锁位轴组件向上运动过程中能够带动所述感应磁体组件运动从而封闭所述压差驱动单元和负压存储单元之间的气流孔二;
11.所述压差驱动单元和负压存储单元之间的气流孔二关闭后,压力控制单元中的复
位磁铁组件通过所述轴克服所述压差启动组件的压差复位阻力从而驱动所述轴向下运动,所述轴向下运动过程中能够解封气路转换单元和压力控制单元之间的气流通道二,同时封闭所述负压存储单元和气路转换单元之间的气流通道一,所述负压存储单元和气路转换单元之间的气流通道一封闭后,所述复位自锁单元中的锁位轴组件在复位拉回弹簧作用下克服压差阻力复位。
12.进一步地,所述气动感应单元包括气动感应腔体,所述气动感应腔体设置有气动驱动组件和磁推杠杆组件运动;
13.所述气动驱动组件包括气动感应膜片,所述气动感应膜片设置在所述气动感应腔体底部,压差动力推片一装在所述气动感应膜片上表面,气动感应腔体底部设置气动感应接口,所述气动感应膜片在气动感应腔体内能够上下来回运动,所述气动感应膜片上下来回运动过程中能够带动所述压差动力推片一上下来回运动从而联动所述气动感应腔体内的磁推杠杆组件中的磁推杠杆转动,所述磁推杠杆转动过程中能够联动磁推杆在磁推杆槽内运动,所述磁推杆上端装有启动磁铁,所述磁推杆在磁推杆槽内运动过程中能够带动所述启动磁铁一起运动,所述启动磁铁连接有复位辅助弹簧为其提供向下运动的复位力。
14.进一步地,所述气动感应腔体上设置有大气接口用以与外界大气相通。
15.进一步地,所述磁推杠杆一端利用自供螺丝一装在气动感应腔体内的盖板一上并能绕这一端转动。
16.进一步地,所述压差驱动单元包括压差驱动腔体,压差驱动腔体与气动感应腔体连接安装在一起并通过气流孔一相连通,所述压差驱动腔体内设置有压差启动组件和感应磁体组件;
17.所述感应磁体组件包括杠杆,所述杠杆一端装有感应磁体组,另一端装有孔塞,所述感应磁体组与启动磁铁相互作用,所述杠杆还与锁位轴组件中的锁位轴联动,所述杠杆在所述感应磁体组与所述启动磁铁相互作用及锁位轴组件中锁位轴作用下能够转动从而使所述孔塞相应的解封或封闭所述气流孔二;
18.所述压差启动组件包括压差启动膜片,所述压差启动膜片设置在所述压差驱动腔体底部并与所述气流孔一位置向对应,所述压差启动膜片在所述压差驱动腔体内能够上下运动从而带动其上表面上装有的压差动力推片二上下运动,所述轴的一端装在所述压差动力推片二上,另一端穿过压差驱动腔体、真空源腔体、控阀腔体、大气腔体与所述大气腔体中的复位磁铁组件相对应,所述压差驱动腔体上设有毛细橡胶塞与外界大气相通。
19.进一步地,所述感应磁体组包括四个感应磁铁,所述四个感应磁铁以倾斜45
°
布置在所述杠杆末端。
20.进一步地,所述杠杆与感应磁铁通过没有磁性的塑料螺丝螺母组相连接且固定。
21.进一步地,所述压差驱动腔体上设置有延时扩容接口用于压差动力腔体b0的扩容。
22.进一步地,所述杠杆一端利用自攻螺丝二装在压差驱动腔体内的盖板二上并能绕这一端转动。
23.进一步地,所述负压存储单元和所述复位自锁单元设置在真空源腔体内,所述复位自锁单元包括锁位轴组件;
24.所述真空源腔体上设有真空源接口与真空系统相连接用以保持真空源腔体的真
空状态,所述真空源腔体内设置有隔间,所述隔间内设有锁位轴组件,所述锁位轴组件包括拉回膜片,所述拉回膜片上表面装有压差动力拉片,锁位轴一端与所述压差动力拉片连接,另一端伸入压差驱动腔体与杠杆联动,所述压差动力拉片连接有复位拉回弹簧,所述拉回膜片将所述隔间分隔成上部腔室与下部腔室,所述下部腔室为与外界相通的常压状态,所述上部腔室通过气流孔三与控阀腔体相联通,翻版止回阀覆盖在所述气流孔三处,拉回膜片在隔间内能够上下运动,所述压差动力拉片在所述拉回膜片或复位拉回弹簧作用下相应的向上运动或向下运动从而带动所述锁位轴向上或向下运动,所述锁位轴向上运动能够联动杠杆转动复位。
25.进一步地,所述锁位轴上装有轴封一用以隔绝所述下部腔室和压差驱动腔体。
26.进一步地,所述轴上装有轴封二用以隔绝所述真空源腔体和压差驱动腔体。
27.进一步地,所述复位拉回弹簧一端抵住所述压差动力拉片,另一端抵住所述隔间内腔表面。
28.进一步地,所述气路转换单元包括控阀腔体,轴封组件一装在所述控阀腔体内底部将所述真空源腔体与控阀腔体连接处的气流通道一封闭,所述轴向上运动过程中能够推动所述轴封组件一打开气流通道一。
29.进一步地,所述轴封组件一包括轴封骨架、轴封三、密封环及轴封骨架复位弹簧,所述轴封骨架套装在所述轴外置于所述气流通道一处,所述轴封骨架复位弹簧抵住所述轴封骨架使其封闭所述气流通道一,所述轴封骨架与所述气流通道一之间设置有密封环,所述轴封骨架与所述轴之间设置有轴封三,所述轴向上运动过程中通过其上的挡圈推动所述轴封骨架向上运动离开所述气流通道一。
30.进一步地,所述压力控制单元包括大气腔体,所述大气腔体与控阀腔体连接处设置有气流通道二,轴封组件二设置在所述气流通道二处,所述轴向上运动过程中能够与所述轴封组件二配合封闭所述气流通道二,所述轴位于所述大气腔体内的端部还连接有复位磁铁组件,所述轴能够在所述复位磁铁组件作用下向下运动从而开启所述气流通道二。
31.进一步地,所述轴封组件二包括轴封限位和轴封四,所述轴封限位装在所述气流通道二处,轴封四装在所述气流通道二处位于所述轴封限位下方,所述轴穿过所述轴封限位和轴封四,所述轴向上运动过程中能够通过其上的凸起部与轴封限位和轴封四配合封闭所述气流通道二。
32.进一步地,所述复位磁铁组件包括往复复位磁铁和固定磁铁,所述往复复位磁铁和固定磁铁两者处于相吸状态,所述轴穿过所述固定磁铁中间的过孔顶住往复复位磁铁,所述往复复位磁铁能够在所述大气腔体内上下运动。
33.进一步地,所述大气腔体上设有大气口,真空界面阀接口以及真空水阀接口。
34.有益效果
35.本发明提供的一种免电式机械记忆型气控延时真空界面阀控制器,本控制器具有免电控,纯机械式的特点,同时具有延时和记忆的功能。该控制器替代了系统控制中所需要的电路控制,极大降低了电路控制的不便性和故障率,该控制器使得整个真空控制系统无需电器元件,直接通过系统的真空状态就可以实现对排污的控制,简化了系统结构,优化了系统属性,同时提高了整个真空系统运作的可靠性和稳定性。
附图说明
36.附图1是本发明实施例的产品处于启动状态的轴的示意图。
37.附图2是本发明实施例的产品分解图。
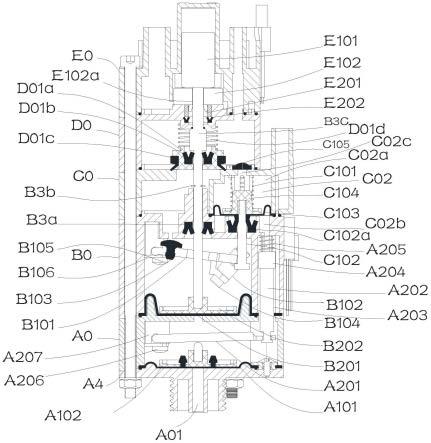
38.附图3是本发明实施例的产品主视图。
39.附图4是本发明实施例的产品结构示意图一。
40.附图5是本发明实施例的产品结构示意图二。
41.附图6是本发明实施例的产品底部示意图。
42.附图7是本发明实施例的产品顶部示意图。
43.附图8是本发明实施例的产品处于常压状态示意图。
44.附图9是本发明实施例的产品处于闭合大气状态示意图。
45.附图10是本发明实施例的产品处于打开负压状态示意图。
46.附图11是本发明实施例的产品处于延迟恢复状态示意图。
47.附图12是本发明实施例的产品接入排污系统示意图。
具体实施方式
48.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
49.在本发明的描述中,需要说明的是,术语“内”、“外”、“前”、“后”、“左”、“右”、“常用侧”、“备用侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
50.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
51.下面通过具体的实施例并结合附图对本发明做进一步的详细描述。
52.实施例
53.如附图1,3和4所示,一种免电式机械记忆型气控延时真空界面阀控制器,它包括气动感应单元a,压差驱动单元b,复位自锁单元c,气路转换单元d,压力控制单元e和负压存储单元f;如附图12所示,将本实施例接入排污系统。
54.其中,如附图如附图3,4,5,6和7所示,所述气动感应单元a包括气动感应腔体a0,所述气动感应腔体a0底部用盖板a4封盖,所述气动感应腔体a0设置有气动驱动组件a1和磁推杠杆组件a2运动;所述气动驱动组件a1包括气动感应膜片a101,所述气动感应膜片a101设置在所述气动感应腔体a0底部,压差动力推片一a102装在所述气动感应膜片a101上表面,气动感应腔体a0底部设置气动感应接口a01,所述气动感应膜片a101在气动感应腔体a0内能够上下来回运动,所述气动感应膜片a101上下来回运动过程中能够带动所述压差动力
推片一a102上下来回运动从而联动所述气动感应腔体a0内的磁推杠杆组件a2中的磁推杠杆a201转动,所述磁推杠杆a201转动过程中能够联动磁推杆a202在磁推杆槽a203内运动,所述磁推杆a202上端装有启动磁铁a204,所述磁推杆a202在磁推杆槽a203内运动过程中能够带动所述启动磁铁a204一起运动,所述启动磁铁a204连接有复位辅助弹簧a205为其提供向下运动的复位力。所述气动感应腔体a0上设置有大气接口a02用以与外界大气相通。所述磁推杠杆a201一端利用自供螺丝一a206装在气动感应腔体a0内的盖板一a207上并能绕这一端转动。
55.所述压差驱动单元b包括压差驱动腔体b0,压差驱动腔体b0与气动感应腔体a0连接安装在一起并通过气流孔一ab01相连通,所述压差驱动腔体b0内设置有压差启动组件b2和感应磁体组件b1;
56.所述感应磁体组件b1包括杠杆b101,所述杠杆b101一端装有感应磁体组b102,另一端装有孔塞b103,所述感应磁体组b102与启动磁铁a204相互作用,所述杠杆b101还与锁位轴组件c1中的锁位轴c102联动,所述杠杆b101在所述感应磁体组b102与所述启动磁铁a204相互作用及锁位轴组件c1中锁位轴c102作用下能够转动从而使所述孔塞b103相应的解封或封闭所述气流孔二bc01;
57.所述压差启动组件b2包括压差启动膜片b201,所述压差启动膜片b201设置在所述压差驱动腔体b0底部并与所述气流孔一ab01位置向对应,所述压差启动膜片b201在所述压差驱动腔体b0内能够上下运动从而带动其上表面上装有的压差动力推片二b202上下运动,所述轴b3的一端装在所述压差动力推片二b202上,另一端穿过压差驱动腔体b0、真空源腔体c0、控阀腔体d0、大气腔体e0与所述大气腔体中的复位磁铁组件e1相对应,所述压差驱动腔体b0上设有毛细橡胶塞b01与外界大气相通。所述感应磁体组b102包括四个感应磁铁,所述四个感应磁铁以倾斜45
°
布置在所述杠杆b101末端。所述杠杆b101与感应磁铁通过没有磁性的塑料螺丝螺母组b104相连接且固定。所述压差驱动腔体b0上设置有延时扩容接口b02用于压差动力腔体b0的扩容。所述杠杆b101一端利用自攻螺丝二b105装在压差驱动腔体b0内的盖板二b106上并能绕这一端转动。
58.所述负压存储单元f和所述复位自锁单元c设置在真空源腔体c0内,所述复位自锁单元c包括锁位轴组件c1;所述真空源腔体c0上设有真空源接口c01与真空系统相连接用以保持真空源腔体c0的真空状态,所述真空源腔体c0内设置有隔间c02,所述隔间c02内设有锁位轴组件c1,所述锁位轴组件c1包括拉回膜片c103,所述拉回膜片c103上表面装有压差动力拉片c104,锁位轴c102一端与所述压差动力拉片c104连接,另一端伸入压差驱动腔体b0与杠杆b101联动,所述压差动力拉片c104连接有复位拉回弹簧c101,所述拉回膜片c103将所述隔间c02分隔成上部腔室c02a与下部腔室c02b,所述下部腔室c02b为与外界相通的常压状态,所述上部腔室c02a通过气流孔三c02c与控阀腔体d0相联通,翻版止回阀c105覆盖在所述气流孔三c02c处,拉回膜片c103在隔间内能够上下运动,所述压差动力拉片c104在所述拉回膜片c103或复位拉回弹簧c101作用下相应的向上运动或向下运动从而带动所述锁位轴c102向上或向下运动,所述锁位轴向上运动能够联动杠杆b101转动复位。所述锁位轴c102上装有轴封一c102a用以隔绝所述下部腔室c02b和压差驱动腔体b0。所述轴b3上装有轴封二b3a用以隔绝所述真空源腔体c0和压差驱动腔体b0。所述复位拉回弹簧c101一端抵住所述压差动力拉片c104,另一端抵住所述隔间c02内腔表面。
59.所述气路转换单元d包括控阀腔体d0,轴封组件一d01装在所述控阀腔体d0内底部将所述真空源腔体c0与控阀腔体d0连接处的气流通道一cd1封闭,所述轴b3向上运动过程中能够推动所述轴封组件一d01打开气流通道一cd1。所述轴封组件一d01包括轴封骨架d01a、轴封三d01b、密封环d01c及轴封骨架复位弹簧d01d,所述轴封骨架d01a套装在所述轴b3外置于所述气流通道一cd1处,所述轴封骨架复位弹簧d01d抵住所述轴封骨架d01a使其封闭所述气流通道一cd1,所述轴封骨架d01a与所述气流通道一cd1之间设置有密封环d01c,所述轴封骨架d01a与所述轴b3之间设置有轴封三d01b,所述轴b3向上运动过程中通过其上的挡圈b3b推动所述轴封骨架d01a向上运动离开所述气流通道一cd1。
60.所述压力控制单元e包括大气腔体e0,所述大气腔体e0与控阀腔体d0连接处设置有气流通道二de1,轴封组件二e2设置在所述气流通道二de1处,所述轴b3向上运动过程中能够与所述轴封组件二e2配合封闭所述气流通道二de1,所述轴b3位于所述大气腔体e0内的端部还连接有复位磁铁组件e1,所述轴b3能够在所述复位磁铁组件e1作用下向下运动从而开启所述气流通道二de1。所述轴封组件二e2包括轴封限位e201和轴封四e202,所述轴封限位e201装在所述气流通道二de1处,轴封四e202装在所述气流通道二de1处位于所述轴封限位e201下方,所述轴b3穿过所述轴封限位e201和轴封四e202,所述轴b3向上运动过程中能够通过其上的凸起部b3c与轴封限位e201和轴封四e202配合封闭所述气流通道二de1。所述复位磁铁组件e1包括往复复位磁铁e101和固定磁铁e102,所述往复复位磁铁e101和固定磁铁e102两者处于相吸状态,所述轴b3穿过所述固定磁铁e102中间的过孔e102a顶住往复复位磁铁e101,所述往复复位磁铁e101能够在所述大气腔体e0内上下运动。所述大气腔体e0上设有大气口e0a,真空界面阀接口e0b以及真空水阀接口e0c。
61.本实施例中,所述气动驱动组件a1在外力作用下能够驱动磁推杠杆组件a2运动,所述磁推杠杆组件a2运动能够带动磁推杆组件a3运动,所述磁推杆组件a3运动能够联动所述压差驱动单元b中的感应磁体组件b1运动,所述感应磁体组件b1在磁推杆组件a3联动下运动能够解封所述压差驱动单元b和负压存储单元f之间关闭的气流孔二bc01;所述压差驱动单元b和负压存储单元f之间的气流孔二bc01打开后,压差驱动腔体b0瞬间被吸成负压状态,所述压差驱动单元b中的压差启动组件b2在气压差的作用下推动轴b3向上运动,所述轴b3向上运动过程中能够封闭气路转换单元d和压力控制单元e之间的气流通道二de1,然后再解封负压存储单元f和气路转换单元d之间的气流通道一cd1,所述负压存储单元f和气路转换单元d之间的气流通道一cd1解封后,所述复位自锁单元c中的锁位轴组件c1在气压差的作用下向上运动,所述锁位轴组件c1向上运动过程中能够带动所述感应磁体组件b1运动从而封闭所述压差驱动单元b和负压存储单元f之间的气流孔二bc01;所述压差驱动单元b和负压存储单元f之间的气流孔二bc01关闭后,外界大气通过所述毛细孔塞b01进入压差驱动腔体b0,使得压差启动组件b2所受压差逐渐减弱,然后压力控制单元e中的复位磁铁组件e1通过所述轴b3克服所述压差启动组件b1的压差复位阻力从而驱动所述轴b3向下运动,所述轴b3向下运动过程中能够解封气路转换单元d和压力控制单元e之间的气流通道二de1,同时封闭所述负压存储单元f和气路转换单元d之间的气流通道一cd1,所述负压存储单元f和气路转换单元d之间的气流通道一cd1封闭后,所述复位自锁单元c中的锁位轴组件c1在复位拉回弹簧c101作用下克服压差阻力复位。
62.上述描述本实施例中控制的工作原理后,下面就本实施例的工作过程进一步说明
如下:所述压差驱动腔体b0在如附图8所示的常压状态下处于常压状态;所述气动感应腔体a0一直保持在常压状态;所述真空源腔体c0一直保持在真空状态。所述气动感应腔体a0与压差驱动腔体b0之间有一个气流孔一ab01。所述感应磁体组b102与启动磁铁a204一直是相斥互锁关系。有压缩气体进入气动感应接口a01,会使得气动感应膜片a101鼓起来,推动磁推杠杆a201使磁推杆a202推动启动磁铁a204克服复位辅助弹簧a205的弹力与感应磁体组b102的斥力运动。使得感应磁体组b102无法保持静止状态,做角位移,开启孔塞b103。所述真空源腔体c0与压差驱动腔体b0相通,压差驱动腔体b0形成真空状态。所述压差启动膜片b201上部处于真空状态,下部的气动感应腔体a0处于常压状态,压差启动膜片b201形成上下压差,推动轴b3向上运动。
63.所述轴b3在向上运动与轴封四e202接触,使得大气腔体e0与控阀腔体d0隔绝,所述控制器由如附图8所示的常压状态变为如附图9所示的闭合大气状态。
64.所述挡圈b2b随轴b3向上运动,推动轴封骨架d01a,打开真空源腔体c0与控阀腔体d0之间的气流通道一cd1,控阀腔体d0立即处于真空状态,此时真空界面阀接口e0b以及真空水阀接口e0c都处于真空状态,实现开阀动作。同时翻版止回阀c105打开,拉回膜片c103上部腔室c02a形成负压,与拉回膜片c103下部腔室c02b的常压形成压差,拉动锁位轴c102向上运动,使杠杆b101回到原位,孔塞b103关闭。同时感应磁体组b102的回位使得启动磁铁a204回到原位。所述控制器由如附图9所示的闭合大气状态变为如附图10所示的打开负压状态。
65.所述压差驱动腔体b0与真空源腔体c0隔绝。压差驱动腔体b0通过毛细橡胶塞b01中的毛细口缓慢进入大气,压差动力推片二b202的压差缓缓下降,推力变小。往复复位磁铁e101和固定磁铁e102由于吸力,推动轴b3向下运动,轴封骨架d01a恢复使得真空源腔体c0与控阀腔体d0关闭。所述控制器由如附图10所示的打开负压状态变为如附图11所示的延时恢复状态。
66.往复复位磁铁e101和固定磁铁e102由于吸力,推动轴b3向下运动,轴b3与轴封四e202断开,此时大气腔体e0与控阀腔体d0相通,此时真空界面阀接口e0b、真空水阀接口e0c都处于常压状态,实现闭阀动作。所述控制器由如附图11所示的延时恢复状态变为如附图8所示的常压状态。
67.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解;其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1