建筑设备的制作方法
本发明涉及一种建筑设备,更详细地,本发明涉及一种考虑斗杆对于作业区域的角度、作业装置的惯性矩以及发动机输出来控制斗杆或动臂的速度的建筑设备。
背景技术:
1、通常,挖掘机是一种在建筑工地等执行各种作业的建筑设备,包括进行挖土的挖掘作业、搬运沙土的装载作业、制造基础的挖地基作业、拆除建筑物的破碎作业、整理地面的平地作业、使地面平整的平整作业等。
2、参照图1,诸如挖掘机这样的建筑设备1具有:下部行驶体2;以能够回转的方式设置在下部行驶体2上的上部回转体3;以及以能够沿上下方向进行工作的方式设置在上部回转体3上的作业装置4。
3、另外,作业装置4具有:动臂4a,该动臂4a形成为多关节,并且后端部以能够旋转的方式支撑于上部回转体3;斗杆4b,该斗杆4b的后端部以能够旋转的方式支撑于动臂4a的前端;以及铲斗4c,该铲斗4c以能够旋转的方式设置于斗杆4b的前端侧。并且,根据使用者的杆操作而供给工作油,动臂缸5(作业用致动器)、斗杆缸6(作业用致动器)和铲斗缸7(作业用致动器)分别使动臂4a、斗杆4b及铲斗4c来工作。
4、在这种建筑设备1中,通过各自的手动操作杆来使动臂4a、斗杆4b、铲斗4c等作业装置4工作,但这种作业装置4分别由关节部连接而进行旋转运动,因此需要驾驶员的相当大的努力来分别操作作业装置4而在规定的区域进行作业。
5、另一方面,动臂缸5支撑动臂4a的自重和位于动臂4a的前端的斗杆4b和铲斗4c,因此动臂缸5上施加有比施加于斗杆缸6或铲斗缸7的负载压力大的负载压力,有时在挖掘作业时动臂4a的移动量跟不上斗杆4b的移动量。
6、具体地,如图2所示,当使铲斗4c的齿尖沿包括倾斜面的作业区域移动并进行作业时,若动臂4a无法跟随斗杆4b的移动量而上升,则存在铲斗4c的齿尖可能不会沿着操作者所期望的方向移动而侵犯或脱离作业区域的问题。特别是,当斗杆4b与倾斜面之间的角度相对较小、或倾斜面的倾斜度较陡而需要相对大的动臂4a的移动量时,经常会发生如上所述的问题。
7、此外,在铲斗4c处于装载状态的情况下,或者诸如倾斜旋转器这样的附件安装在斗杆4b的前端部而相对于动臂4a的惯性矩增加,则在使斗杆4b伸展并开始进行抓土时,可能发生动臂4a的上升跟不上斗杆4b因自重而下降的速度的情况。
8、另外,若驾驶员为了提高燃料效率等目的而选择标准模式或经济模式来进行作业,则向液压缸供给的作为工作油单位时间供给量的油量少,在需要瞬间最大功率的情况下,可能发生动臂4a无法跟随斗杆4b的移动量而上升或下降的情况。
技术实现思路
1、要解决的技术问题
2、为了解决如上所述的现有技术的问题而提出本发明,本发明的目的在于提供一种建筑设备,其基于动臂驱动要求速度、作业装置的惯性矩以及发动机功率来控制斗杆或动臂的速度,从而能够使动臂对应于斗杆的移动量而上升或下降。
3、解决问题的手段
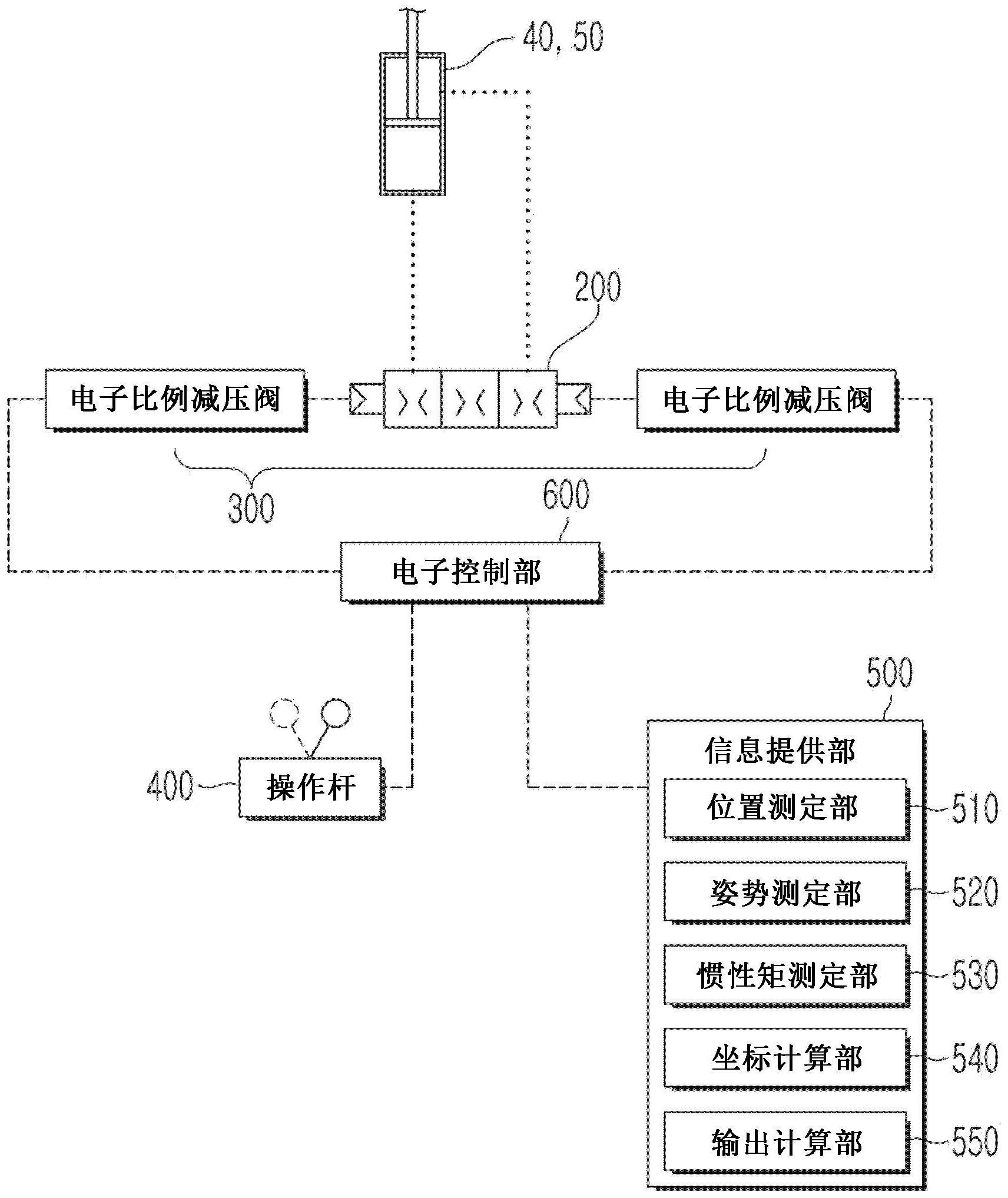
4、本发明的一方面提供一种建筑设备,包括:下部行驶体;上部回转体,其以能够旋转的方式支撑在所述下部行驶体上;作业装置,其包括通过各自的液压缸工作的动臂、斗杆以及铲斗,并由所述上部回转体支撑;控制阀,其控制所述液压缸;电子比例减压阀,其控制所述控制阀的阀芯;操作杆,其输出与驾驶员的操作量相对应的操作信号;信息提供部,其提供所述作业装置以及作业区域的信息;以及电子控制部,其演算并输出对于所述电子比例减压阀的先导压力,所述电子控制部利用所述操作杆的操作信号和由所述信息提供部提供的信息来控制所述液压缸的速度。
5、在一实施例中,所述信息提供部可以向所述电子控制部提供动臂驱动要求速度、所述作业装置的惯性矩以及发动机最大功率中的一个以上。
6、在一实施例中,所述电子控制部可以将所述动臂驱动要求速度与基准值进行比较。
7、在一实施例中,当所述动臂驱动要求速度在基准值以下时,所述电子控制部可以将预先设定的设定值设定为斗杆速度增加率,当所述动臂驱动要求速度超过基准值时,所述电子控制部可以将小于所述设定值的值设定为斗杆速度增加率。
8、在一实施例中,所述电子控制部可以设定为使斗杆速度增加率随着所述动臂驱动要求速度增加而减小。
9、在一实施例中,所述电子控制部可以将所述作业装置的惯性矩与基准值进行比较。
10、在一实施例中,当所述作业装置的惯性矩在基准值以下时,所述电子控制部可以将预先设定的设定值设定为斗杆速度增加率,当所述作业装置的惯性矩超过基准值时,所述电子控制部可以将小于所述设定值的值设定为斗杆速度增加率。
11、在一实施例中,所述电子控制部可以将所述发动机最大功率与基准值进行比较。
12、在一实施例中,当所述发动机最大功率在基准值以上时,所述电子控制部可以将预先设定的设定值设定为斗杆速度增加率,当所述发动机最大功率小于基准值时,所述电子控制部可以将小于所述设定值的值设定为斗杆速度增加率。
13、在一实施例中,所述信息提供部向所述电子控制部提供动臂驱动要求速度、作业装置的惯性矩以及发动机最大功率,所述电子控制部将所述动臂驱动要求速度、所述作业装置的惯性矩以及所述发动机最大功率与基准值进行比较,当所述动臂驱动要求速度在基准值以下时,所述电子控制部可以将预先设定的第一设定值设定为第一斗杆速度增加率,当所述动臂驱动要求速度超过基准值时,所述电子控制部可以将所述第一设定值乘以第一减小比率得到的值设定为第一斗杆速度增加率,当所述作业装置的惯性矩在基准值以下时,所述电子控制部可以将预先设定的第二设定值设定为第二斗杆速度增加率,当所述作业装置的惯性矩超过基准值时,所述电子控制部可以将所述第二设定值乘以第二减小比率得到的值设定为第二斗杆速度增加率,当所述发动机最大功率在基准值以上时,所述电子控制部可以将预先设定的第三设定值设定为第三斗杆速度增加率,当所述发动机最大功率小于基准值时,所述电子控制部可以将所述第三设定值乘以第三减小比率得到的值设定为第三斗杆速度增加率。
14、在一实施例中,所述电子控制部可以将所述第一斗杆速度增加率至所述第三斗杆速度增加率中的最小值设定为斗杆速度增加率。
15、在一实施例中,所述电子控制部可以将所述第一设定值至所述第三设定值中的任一个设定值与所述第一减小比率至所述第三减小比率相乘得到的值设定为斗杆速度增加率。
16、在一实施例中,可以是,所述信息提供部向所述电子控制部提供动臂驱动要求速度、作业装置的惯性矩以及发动机最大功率,所述电子控制部将所述动臂驱动要求速度、所述作业装置的惯性矩以及所述发动机最大功率与基准值进行比较,当所述动臂驱动要求速度在基准值以下时,所述电子控制部可以将预先设定的第一设定值设定为第一动臂速度增加率,当所述动臂驱动要求速度超过基准值时,所述电子控制部可以将大于所述第一设定值的值设定为第一动臂速度增加率,当所述作业装置的惯性矩在基准值以下时,所述电子控制部可以将预先设定的第二设定值设定为第二动臂速度增加率,当所述作业装置的惯性矩超过基准值时,所述电子控制部可以将大于所述第二设定值的值设定为第二动臂速度增加率,当所述发动机最大功率在基准值以上时,所述电子控制部可以将预先设定的第三设定值设定为第三动臂速度增加率,当所述发动机最大功率小于基准值时,所述电子控制部可以将大于所述第三设定值的值设定为第三动臂速度增加率。
17、在一实施例中,所述电子控制部可以将所述第一动臂速度增加率至所述第三动臂速度增加率中的最大值设定为动臂速度增加率。
18、在一实施例中,所述操作杆可以作为电动式操纵杆,与驾驶员的操作量成比例地产生电信号并提供给电子控制部。
19、发明效果
20、根据本发明的一方面,若考虑动臂驱动要求速度、作业装置的惯性矩以及发动机的最大功率值全部而采用最小的斗杆速度增加率,则在多种情况下能够使动臂对应于斗杆的移动量而上升或下降,因此能够提高斗杆速度控制的可靠性。
21、本发明的效果不限于所述效果,应理解为包括能够从本发明的详细说明或权利要求书中记载的发明的构成推断的所有效果。
- 还没有人留言评论。精彩留言会获得点赞!