一种适用于多工况的煤矿水仓清理机器人及其使用方法
1.本发明涉及一种水仓清理机器人,尤其涉及一种适用于多工况的煤矿水仓清理机器人及其使用方法,属于煤矿水仓清理机器人技术领域。
背景技术:
2.煤矿井下水仓是保证安全生产、防止矿井水灾的重要设施。随着矿井开采的延伸,矿井涌水量逐渐增大,排水泵不能及时排往地面的涌水积存在井下水仓中。由于大量涌水携带固体颗粒物进入水仓,使得井下水仓有效蓄水容积减小,必须定期对水仓内淤积的固体物进行清理。《煤矿安全规程》第一百八十条规定,主要水仓必须有主仓和副仓,一个水仓清理时,另一个水仓能正常使用,并始终保持原设计容积的3/4以上,如此循环交替工作。井下水仓工作条件恶劣,淤积物中含水量大,用传统的铁锹装矿车运出清仓方式劳动强度大,工作效率低,以致清仓周期长,影响安全生产,并且现有的水仓清理机器人由于灵活度差,不能很好适应不同水仓的宽度和不同厚度的煤泥。因此,高效的矿井水仓清理机器人,对提高水仓清理速度和水仓抗击水灾能力,保障矿井安全生产具有重要的现实意义。
技术实现要素:
3.本发明的目的在于解决现有技术的不足之处,提供一种适用于多工况的煤矿水仓清理机器人及其使用方法,旨在提高清仓效率,进而提高煤矿水仓利用率,减少安全隐患,实现高效、安全清仓。
4.为了实现上述目的,本发明采用如下技术方案:一种适用于多工况的煤矿水仓清理机器人,包括:行走底盘;煤泥运输装置,设于所述行走底盘,用于输送煤泥;搅拌集泥装置,设于所述煤泥运输装置一端,用于收集煤泥至所述煤泥运输装置,包括:两组搅拌集泥组件,之间间隔设置,每组搅拌集泥组件包括:固定壳套;伸缩壳,可伸缩地设于所述固定壳套;伸缩驱动件,驱动伸缩壳进行伸缩;转动驱动件,设于所述伸缩壳;多个螺旋铰刀,连接于所述转动驱动件,受所述转动驱动件驱动转动以进行搅拌集泥;所述伸缩驱动件驱动所述伸缩壳进行伸缩,伸缩壳带动转动驱动件及多个螺旋铰刀移动以适配煤矿水仓的宽度;煤泥料斗,用于装载煤泥运输装置运输的煤泥。
5.进一步的,所述煤泥运输装置包括:
安装壳体,一端连接于搅拌集泥装置,另一端延伸至所述煤泥料斗处;输送带,套设于所述安装壳体,用于输送煤泥;多个橡胶板,等距固定安装在输送带上。
6.进一步的,所述煤矿水仓清理机器人还包括:滑动装置,包括:滑轨,设于所述行走底盘;滑台,可滑动地设于所述滑轨,所述安装壳体设于所述滑台;推移驱动件,驱动所述滑台沿所述滑轨移动,使所述安装壳体带动所述搅拌集泥装置移动以适配地形。
7.进一步的,所述安装壳体与所述滑台铰接;所述煤矿水仓清理机器人还包括:俯仰驱动件,本体与滑台铰接,驱动轴与所述安装壳体铰接,所述俯仰驱动件驱动所述安装壳体转动。
8.进一步的,所述煤矿水仓清理机器人还包括:自动卷缆装置,包括:安装座,设于所述行走底盘;电缆盘,可转动地设于所述安装座,用于盘绕电缆;转动驱动件,连接所述电缆盘以驱动其转动,所述转动驱动件转速随车速变化而变化,实现电缆的自动收放。
9.进一步的,多个螺旋铰刀包括双叶螺旋铰刀及三叶螺旋铰刀,所述双叶螺旋铰刀一端与所述三叶螺旋铰刀一端通过花键套与花键轴可滑动地连接,所述三叶螺旋铰刀另一端连接所述转动驱动件,所述双叶螺旋铰刀另一端动地设于固定壳套。
10.一种如权利要求1所述适用于多工况的煤矿水仓清理机器人的使用方法,包括如下步骤:步骤一:启动水仓清理机器人,通过行走底盘移动至待收集的煤泥附近,控制伸缩驱动件驱动伸缩壳移动,调整搅拌集泥装置至合适的宽度;步骤二:转动驱动件驱动多个螺旋铰刀转动以收集煤泥,俯仰驱动件驱动安装壳体转动带动螺旋铰刀自上而下移动并进行煤泥的收集工作,输送带将螺旋铰刀收集的煤泥输送至煤泥料斗内;步骤三:控制推移驱动件驱动滑台移动,带动搅拌集泥装置移动至下一待收集的煤泥处;步骤四:重复执行步骤一至步骤三直至达到滑台的行程极限;步骤五:将滑台移动至初始位置,通过行走底盘移动至下一待收集的煤泥附近;步骤六:重复执行步骤一至步骤五直至完成清理。
11.本发明的有益效果:本发明的水仓清理机器人的驱动方式采用全液压驱动,使水仓清理机器人具有可靠性高、使用寿命长和防爆等特点。行走方式采用橡胶履带可以起到防滑、耐腐蚀和对水仓底板的保护作用。采用多自由度的清仓集泥装置,可实现集泥装置前后移动和上下俯仰,增强了集泥灵活性。采用宽度可调的搅拌集泥装置,可实现一机适应不同宽度水仓,实现全断面清仓。通过俯仰驱动件能够调节搅拌集泥装置上下高度,从而能够更好的适应较厚的煤泥。
12.同时本发明采用的煤泥运输装置可以改善现有清仓机采用刮板输送机输送效果
差的现象,增强了对高含水率煤泥的适应性,避免了刮板输送机卡链、断链等事故发生。本发明的水仓清理机器人进一步增强了对水仓工况适应性,可有效提高清仓效率,进而提高煤矿水仓利用率,减少安全隐患,实现高效、安全清仓。
附图说明
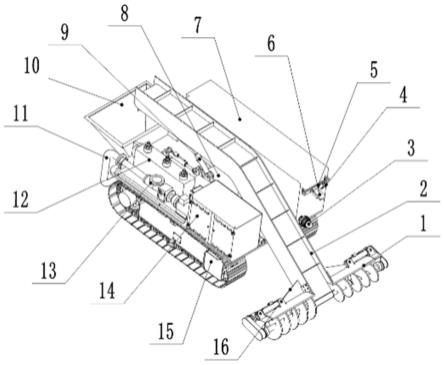
13.图1为本发明的一种适用于多工况的煤矿水仓清理机器人整机的示意图。
14.图2为本发明的一种适用于多工况的煤矿水仓清理机器人的俯视图。
15.图3为本发明的一种适用于多工况的煤矿水仓清理机器人的搅拌集泥装置示意图。
16.图4为本发明的一种适用于多工况的煤矿水仓清理机器人的煤泥运输装置示意图。
17.图5为本发明的一种适用于多工况的煤矿水仓清理机器人的滑动装置示意图。
18.图6为本发明的一种适用于多工况的煤矿水仓清理机器人的自动卷缆装置示意图。
19.图7、图8、图9、图10为本发明的一种适用于多工况的煤矿水仓清理机器人的初始状态、向前滑移状态、集泥搅拌机构伸出状态、俯仰状态示意图。
20.附图标记说明:1—搅拌集泥装置,2—煤泥运输装置,3—照明灯,4—多气体传感器,5—安装架,6—高清防爆摄像仪,7—防护罩,8—滑动装置,9—俯仰驱动件,10—煤泥料斗,11—煤泥胶管,12—通信装置,13—螺杆泵,14—电控箱,15—行走底盘,16—加固筋板,17—泵站,18—自动卷缆装置,19—防爆电源箱,20—双叶螺旋铰刀,21—三叶螺旋铰刀,22—伸缩壳,23—铰耳一,24伸缩驱动件,25—固定壳套,26—安装板,27—转动驱动件,28—转动驱动件安装座,29—传动箱,30—安装壳体,31—皮带机,32—橡胶板,33—限位套,34—滑轨,35—滑台,36—铰耳二,37—推移驱动件,38—筋板,39—转动驱动件,40—安装座,41—电缆盘。
具体实施方式
21.下面结合附图和具体实施例对本发明做进一步的详细说明:如图1~10所示,一种适用于多工况的煤矿水仓清理机器人包括搅拌集泥装置1、煤泥运输装置2、照明灯3、多气体传感器4、高清防爆摄像仪6、安装架5、防护罩7、滑动装置8、俯仰驱动件9、煤泥料斗10、煤泥胶管11、通信装置12、螺杆泵13、电控箱14、行走底盘15、加固筋板16、自动卷缆装置18、泵站17和防爆电源箱19。所述的搅拌集泥装置1设置在煤泥运输装置2前端,通过高强度螺栓相连接,所述的煤泥运输装置2设置在滑动装置8上方,右侧与滑动装置8铰接,所述的安装架5和照明灯3固定在防护罩7前端,所述的高清防爆摄像仪6和多气体传感器4固定在安装架5上,所述的防护罩7固定在行走底盘15上方左侧位置处,所述的滑动装置8固定在行走底盘15上,所述的俯仰驱动件9伸出端与煤泥运输装置2铰接,固定端与滑动装置8铰接,控制煤泥运输装置2的俯仰动作,所述的煤泥料斗10设置在煤泥运输装置2下方,与行走底盘15相固定,所述的煤泥胶管11设置在螺杆泵13与煤泥料斗10之间,将螺杆泵13与煤泥料斗10相连接,所述的通信装置12固定在螺杆泵13左侧相邻位置,所述的螺杆泵13固定在电控箱14左侧相邻位置,所述的电控箱14固定在履带行走底盘15上方
右侧位置处,所述的行走底盘15为整机行走装置,所述的加固筋板16固定在煤泥运输装置2和搅拌集泥装置1之间,起加固的作用,所述的自动卷缆装置18固定在煤泥料斗10左侧相邻位置,所述的泵站17固定在防护罩7里,所述的防爆电源箱19固定在电控箱14左侧;所述的搅拌集泥装置1包括双叶螺旋铰刀20、三叶螺旋铰刀21、伸缩壳22、铰耳一23、伸缩驱动件24、固定壳套25、安装板26、传动箱29、转动驱动件27、转动驱动件安装座28,所述的双叶螺旋铰刀30一端为光轴,与煤泥运输装置2通过过盈配合相连接,另一端为花键套,所述的三叶螺旋铰刀21一端为花键轴,与双叶螺旋铰刀20相连接,另一端与传动箱29相连接,所述的传动箱29为链传动,所述的转动驱动件27安装在传动箱29另一端,通过转动驱动件安装座28固定在固定壳套25上,所述的伸缩壳22和固定壳套25上设有铰耳一23,通过伸缩驱动件24相连接,实现伸缩动作,所述的安装板26焊接在固定壳套25上;所述的煤泥运输装置2包括安装壳体30、皮带机31和橡胶板32,所述的皮带机31固定安装在安装壳体30上,所述的橡胶板32多个等距固定安装在皮带机31上。
22.所述的滑动装置8包括限位套33、滑轨34、滑台35、铰耳二36、筋板38、推移驱动件37,所述的滑轨34上设有螺纹孔,所述的限位套33安装在滑轨34两端,起限位作用,所述的滑台35安装在滑轨34上,滑台35一端侧面设有铰耳二36,所述的筋板38安装在铰耳二36与滑台35之间,起加固作用,所述铰耳二36左侧还设有铰耳二36,所述的推移驱动件37铰接在两个铰耳二36之间,推移滑台35前后移动;所述的自动卷缆装置包括转动驱动件39、安装座40和电缆盘41,所述的电缆盘41表面高静压电粉末喷涂处理,所述的液压马39达转速高低随车速变化而变化,实现电缆的自动收放;一种适用于多工况的煤矿水仓清理机器人的使用方法,包括如下步骤:步骤一:启动水仓清理机器人,通过行走底盘移动至待收集的煤泥附近,控制伸缩驱动件驱动伸缩壳移动,调整搅拌集泥装置至合适的宽度;步骤二:转动驱动件驱动多个螺旋铰刀转动以收集煤泥,俯仰驱动件驱动安装壳体转动带动螺旋铰刀自上而下移动并进行煤泥的收集工作,输送带将螺旋铰刀收集的煤泥输送至煤泥料斗内;步骤三:控制推移驱动件驱动滑台移动,带动搅拌集泥装置移动至下一待收集的煤泥处;步骤四:重复执行步骤一至步骤三直至达到滑台的行程极限;步骤五:将滑台移动至初始位置,通过行走底盘移动至下一待收集的煤泥附近;步骤六:重复执行步骤一至步骤五直至完成清理。
23.本发明的附图的作用是用图形补充说明书的文本部分的说明。为了直观生动地介绍本发明的技术特征和总体技术方案,但不能理解为对本发明保护范围的限制。
24.在本发明的描述中,涉及到的方位描述,例如“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1