一种复杂地形越障救援车
1.本发明涉及应急救援装备技术领域,具体涉及一种复杂地形越障救援车。
背景技术:
2.发生在野外尤其是复杂地形的自然灾害,如泥石流、山体滑坡等灾害,通常会引发落石塌方等情况,此时山区的道路往往会被阻断,危害着人民群众的生命安全。
3.现有的野外救援设备,通常为履带式挖掘设备,障碍物通过能力较低,如果设备前方形成多级台阶等复杂地形,极大可能会被困在原地无法前进,只能先进行清障处理才能继续前行,耽误救援的黄金时间,无法满足救援需求。
技术实现要素:
4.本发明的目的在于提供一种复杂地形越障救援车,旨在解决现有的野外救援设备在复杂地形通过性不强无法满足救援需求的技术问题。
5.为实现上述目的,本发明提供了一种复杂地形越障救援车,包括车体、四组三角轮和挖掘机构,所述挖掘机构与所述车体固定连接并位于所述车体上方,四组所述三角轮两两对称布置且分别设置在所述车体的两侧;
6.每组所述三角轮包括两块三角板、驱动轮组和三个车轮,两块所述三角板相对平行设置,所述驱动轮组和三个所述车轮均设置在两块所述三角板之间,每个所述车轮分别设置所述三角板的顶角位置,并与所述三角板转动连接。
7.其中,所述驱动轮组包括大驱动轮、三个第一从动轮和三个第二从动轮,所述大驱动轮、所述第一从动轮和所述第二从动轮从内向外依次布置并两两啮合呈行星齿轮系设置。
8.其中,所述大驱动轮的圆心与所述三角板的中心重合,所述第一从动轮和所述第二从动轮的圆心均设置在从大驱动轮的圆心向所述三角板的顶角延伸的径线上,径线间的夹角为120
°
。
9.其中,所述大驱动轮的轮轴与所述车体内的直流减速机转动连接,每个所述第二从动轮分别与一个所述车轮固定连接且保持同步运动。
10.其中,所述车体呈内空腔体设置,并在壳体上开设有若干散热孔。
11.其中,所述挖掘机构包括基座、机械臂和挖斗,所述基座与所述车体固定连接,所述机械臂和所述挖斗依次连接在所述基座上,所述挖斗位于末端。
12.其中,所述基座包括固定底盘和舵机,所述固定底盘由多层盘片平行设置组成,除最底层盘片外的盘片均呈空心环片状设置,所述舵机设置在所述固定底盘的中心。
13.其中,所述机械臂远离所述挖斗的一端与所述基座转动连接,所述机械臂沿所述基座至所述挖斗方向依次设置有三个活动关节。
14.本发明提供了一种复杂地形越障救援车,通过设置在车体两侧的四组三角轮实现在复杂地形中的障碍穿越,尤其在遭遇履带式和普通轮式结构无法跨越的有高差路段时,
通过车体内的驱动电机带动行星轮系使三角轮围绕三角板中心转动,形成大尺寸的巨轮效应,从而跨越现有车轮直径无法翻越的障碍物,同时搭配挖掘机构上的挖斗进行路障清理,本发明可以更为迅速在复杂地形中穿行,解决了现有的野外救援设备在复杂地形通过性不强无法满足救援需求的技术问题。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
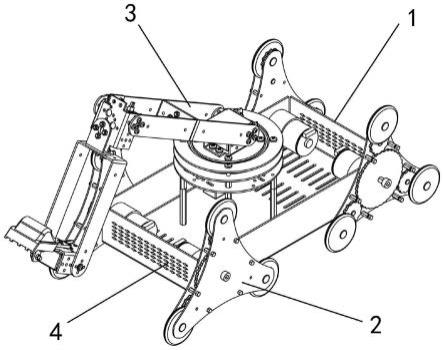
16.图1是本发明的一种复杂地形越障救援车的结构示意图。
17.图2是本发明的一种复杂地形越障救援车的主视图。
18.图3是本发明的一种复杂地形越障救援车的侧视图。
19.图4是本发明的一种复杂地形越障救援车的俯视图。
20.图5是本发明的三角轮的结构示意图。
21.1-车体、2-三角轮、21-三角板、22-驱动轮组、221-大驱动轮、222-第一从动轮、223-第二从动轮、23-车轮、3-挖掘机构、31-基座、311-固定底盘、312-舵机、32-机械臂、33-挖斗、4-散热孔。
具体实施方式
22.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
23.请参阅图1至图5,本发明提供了一种复杂地形越障救援车,包括车体1、四组三角轮2和挖掘机构3,所述挖掘机构3与所述车体1固定连接并位于所述车体1上方,四组所述三角轮2两两对称布置且分别设置在所述车体1的两侧;
24.每组所述三角轮2包括两块三角板21、驱动轮组22和三个车轮23,两块所述三角板21相对平行设置,所述驱动轮组22和三个所述车轮23均设置在两块所述三角板21之间,每个所述车轮23分别设置所述三角板21的顶角位置,并与所述三角板21转动连接。
25.所述驱动轮组22包括大驱动轮221、三个第一从动轮222和三个第二从动轮223,所述大驱动轮221、所述第一从动轮222和所述第二从动轮223从内向外依次布置并两两啮合呈行星齿轮系设置。
26.所述大驱动轮221的圆心与所述三角板21的中心重合,所述第一从动轮222和所述第二从动轮223的圆心均设置在从大驱动轮221的圆心向所述三角板21的顶角延伸的径线上,径线间的夹角为120
°
。
27.所述大驱动轮221的轮轴与所述车体1内的直流减速机转动连接,每个所述第二从动轮223分别与一个所述车轮23固定连接且保持同步运动。
28.在本实施方式中,四组所述三角轮2组成了所述复杂地形越障救援车的行走机构,由于所述大驱动轮221的圆心与所述三角板21的中心重合,每组三角轮2上的车轮23均以大
驱动轮221的圆心为运动中心转动,与此同时,每个车轮23还在行星轮系的驱动下各自分别转动,因此在遭遇路障的时候,三角轮2会以一个车轮23为支点,沿前进方向转动,如果路障的高度小于三角板21的一边边长时,三角轮2可以直接跨越路障,当路障高度大于三角板21的边长时,第二个车轮23会落在路障上形成第二支点,三角轮2持续转动直至翻越相应路障,在此过程中,车轮23同时也在自转增大摩擦力和前进动力。
29.所述车体1呈内空腔体设置,并在壳体上开设有若干散热孔4。
30.在本实施方式中,散热孔4的开设方便车体1内的器件散热,内空腔体的设置使得所述车体1能容纳更多的功能部件。
31.所述挖掘机构3包括基座31、机械臂32和挖斗33,所述基座31与所述车体1固定连接,所述机械臂32和所述挖斗33依次连接在所述基座31上,所述挖斗33位于末端。
32.所述基座31包括固定底盘311和舵机312,所述固定底盘311由多层盘片平行设置组成,除最底层盘片外的盘片均呈空心环片状设置,所述舵机312设置在所述固定底盘311的中心。
33.所述机械臂32远离所述挖斗33的一端与所述基座31转动连接,所述机械臂32沿所述基座31至所述挖斗33方向依次设置有三个活动关节。
34.在本实施方式中,三个活动关节保障了所述机械臂32在舵机312的驱动下可以在车体1平面上进行360
°
的转动,同时机械臂32中部的活动关节可以使机械臂32实现上下摆动动作从而完成机械臂32的高低调整,位于最末端的活动关节保障了所述挖斗33的灵活动作,通过三个活动关节的配合运作,所述挖掘机构3能对路上的零散障碍物进行挖掘清理,配合三角轮2还可以提高所述复杂地形越障救援车的通过效率。
35.所述复杂地形越障救援车的车轮驱动电机为直流减速电机,各电机间有一定的间隔距离,且左右轮间隔距离相同时易于实现差速转向。
36.进一步的,所述复杂地形越障救援车还包括硬件控制系统,所述硬件控制系统包括mcu模块、电源模块、电机驱动模块、摄像头模块、无线遥控模块和lcd显示模块。
37.其中mcu模块采用at89c51单片机控制芯片进行各模块综合控制,电源模块配合锂电池为各个模块正常工作提供稳定电压,进行电压调节,电机驱动模块主要分为两部分驱动,包括越障车轮的直流驱动电机驱动与挖掘机构的驱动。
38.摄像机模块采用ptc08串口摄像头模块,是将图像收集、拍摄、数据处理、传输数据串行口等功能集合为一体的图像采集处理模块,配合无线遥控模块可以实现远程控制所述复杂地形越障救援车的运行操作,降低危险性。
39.lcd显示模块用于显示系统当前状态的重要参数,使操作者随时清楚设备的运行状态。
40.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1