一种高精度自动测量桁架式桩腿相位差和高度的装置的制作方法
1.本发明涉及桁架式桩腿的自升式平台,更具体地说,涉及一种高精度自动测量桁架式桩腿相位差和高度的装置。
背景技术:
2.自升式平台是用来实现海洋资源开发的必需装备,如开采油气的自升式钻井平台、海上风电设备安装的自升式施工平台及专用自升式住宿平台,桩腿作为自升式风电安装平台的一个重要构件,主要用于站立工况下支撑船体及承载环境载荷和工作载荷的作用,一般分为圆柱式和桁架式。
3.一般来说,对于桁架式桩腿最大容许桩腿相位差(rpd)是和桩腿强度密切相关的,桩腿相位差(rpd)为桁架式桩腿的两个相邻弦杆具有相同标高的齿条板对于升降室顶部的垂直位移的绝对差值。
4.对于很多自升式风电安装平台桩腿最大容许桩腿相位差(rpd)也就是50~60mm,而且在平台爬升过程中需要随时检测,因此一个高精度自动测量的装置就很有必要。
5.以往对桩腿rpd检测采用在升降室顶部安装从动齿轮1进行检测,如图1所示,但是该方法收到齿条和从动齿轮制造公差及啮合误差有关,无法实现毫米级别的高精度自动检测。
技术实现要素:
6.针对现有技术中存在的上述缺陷,本发明的目的是提供一种高精度自动测量桁架式桩腿相位差和高度的装置,能够满足各类自升式平台桁架桩腿的相位差和高度的毫米级别测量,亦可以用于圆柱式桩腿的高度测量。
7.为实现上述目的,本发明采用如下技术方案:
8.一种高精度自动测量桁架式桩腿相位差和高度的装置,包括设于桩腿的外侧位置的多个测距单元,以及用以接收所述测距单元的测量信息的控制电脑,并由所述控制电脑计算出相位差;
9.所述测距单元的数量与位于所述桩腿的外侧位置的弦杆的数量相同;
10.每个所述测距单元均包括反光板、测距仪和水平度调整云台;
11.所述反光板设于所述弦杆的顶部位置;
12.所述水平度调整云台设于抬升室的顶部位置;
13.所述测距仪设于所述水平度调整云台上,所述测距仪上配有信号收集发射装置;
14.所述测距仪的测量端朝向所述反光板。
15.较佳的,所述桩腿为三角形时,所述弦杆具有三个,分别位于所述桩腿的顶角位置;
16.较佳的,所述测距仪采用激光测距仪;
17.所述激光测距仪的测距为0.5~500m,典型精度为
±
1mm,重复精度为
±
0.3mm。
18.较佳的,所述控制电脑设于驾驶室内。
19.本发明所提供的一种高精度自动测量桁架式桩腿相位差和高度的装置,测量精度可以达到
±
1mm,通过重复测量降低可以达到
±
0.3mm,量程范围0.5-500m,能够满足各类自升式平台桁架桩腿的相位差和高度的测量,亦可以用于圆柱式桩腿的高度测量。本发明可以实现提供高精度自动测量桁架桩腿相位差,相比以往装置精度大幅度提高。
附图说明
20.图1是自升式平台上桩腿的布置示意图;
21.图2是图1中单个桩腿外侧弦杆的布置示意图;
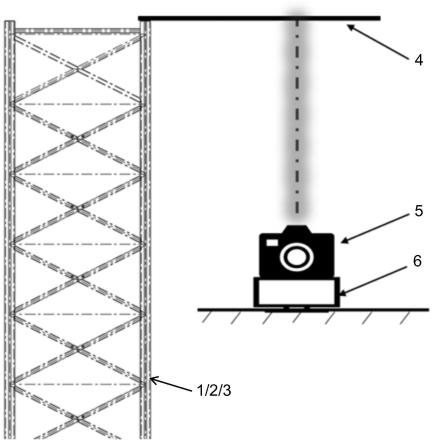
22.图3是本发明装置中测距单元在弦杆上的布置示意图;
23.图4是本发明装置中测距单元在圆柱式桩腿上的布置示意图。
具体实施方式
24.为了能更好地理解本发明的上述技术方案,下面结合附图和实施例进一步说明本发明的技术方案。
25.结合图1所示,现有自升式平台上具有四个桩腿a、b、c、d,其中,桩腿a和桩腿d为对角设置,桩腿b和桩腿c为对角设置。
26.结合图2所示,四个桩腿a、b、c、d均采用三角形桩腿,单个三角形桩腿的外侧布置有三个弦杆1、2、3,分别位于三角形桩腿的三个顶角位置。
27.本发明所提供的一种高精度自动测量桁架式桩腿相位差和高度的装置,包括设于桩腿a、b、c、d的外侧位置的多个测距单元,以及用以接收测距单元的测量信息的控制电脑,控制电脑设于驾驶室内。
28.测距单元的数量与位于桩腿a、b、c、d的外侧位置的弦杆1、2、3的数量相同。
29.结合图3所示,每个测距单元均包括反光板4、测距仪5和水平度调整云台6。
30.反光板4安装在弦杆1、2、3的顶部位置,并向外伸展。
31.水平度调整云台6安装抬升室的顶部位置。
32.测距仪5安装在水平度调整云台6上,测距仪5上配有信号收集发射装置,用以将检测数据传输至控制电脑,并由控制电脑计算出相位差(rpd)。
33.测距仪5的测量端朝向反光板4。
34.测距仪4采用激光测距仪,激光线射出在反光板4上用以测距。
35.激光测距仪的测距为0.5~500m,典型精度为
±
1mm,重复精度为
±
0.3mm。
36.当桩腿为圆形的,取消弦杆设置,整根桩腿就是一个圆柱,反光板4安装在桩腿的顶部位置,并向外伸展,如图4所示。
37.通过测距仪4测量在调整水平后,通过时刻检测反光板4到抬升室顶部的距离即可获得桩腿顶部到抬升室顶部的距离,从而可以实时监测自升式平台桩腿下方的长度,通过实时监测同一桩腿上三个弦杆顶部到抬升室顶部的距离差,并将相关数据传输回到平台的控制电脑,即可算出桩腿下放和爬升过程中的相位差(rpd),通过将测量数据回传给驾驶室,即可在驾驶室时刻监测到自升式平台各个桩腿的相位差和下放高度,以便时刻监测平台桩腿,保证安全。
38.相位差(rpd)为同一个桩腿上三个弦杆在下放时的高度差值的最大值。
39.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
技术特征:
1.一种高精度自动测量桁架式桩腿相位差和高度的装置,其特征在于:包括设于桩腿的外侧位置的多个测距单元,以及用以接收所述测距单元的测量信息的控制电脑,并由所述控制电脑计算出相位差;所述测距单元的数量与位于所述桩腿的外侧位置的弦杆的数量相同;每个所述测距单元均包括反光板、测距仪和水平度调整云台;所述反光板设于所述弦杆的顶部位置;所述水平度调整云台设于抬升室的顶部位置;所述测距仪设于所述水平度调整云台上,所述测距仪上配有信号收集发射装置;所述测距仪的测量端朝向所述反光板。2.根据权利要求1所述的高精度自动测量桁架式桩腿相位差和高度的装置,其特征在于:所述桩腿为三角形结构,所述弦杆具有三个,分别位于所述桩腿的顶角位置。3.根据权利要求1所述的高精度自动测量桁架式桩腿相位差和高度的装置,其特征在于:所述测距仪采用激光测距仪;所述激光测距仪的测距为0.5~500m,典型精度为
±
1mm,重复精度为
±
0.3mm。4.根据权利要求1所述的高精度自动测量桁架式桩腿相位差和高度的装置,其特征在于:所述控制电脑设于驾驶室内。
技术总结
本发明公开了一种高精度自动测量桁架式桩腿相位差和高度的装置,包括设于桩腿的外侧位置的多个测距单元,以及用以接收所述测距单元的测量信息的控制电脑,并由所述控制电脑计算出相位差;所述测距单元的数量与位于所述桩腿的外侧位置的弦杆的数量相同;每个所述测距单元均包括反光板、测距仪和水平度调整云台;所述反光板设于所述弦杆的顶部位置;所述水平度调整云台设于抬升室的顶部位置;所述测距仪设于所述水平度调整云台上,所述测距仪上配有信号收集发射装置;所述测距仪的测量端朝向所述反光板。本发明能够满足各类自升式平台桁架桩腿的相位差和高度的毫米级别测量,亦可以用于圆柱式桩腿的高度测量。于圆柱式桩腿的高度测量。于圆柱式桩腿的高度测量。
技术研发人员:金晶 黄曌宇 罗瑞锋 张家齐 周骏 刘远 晁世方
受保护的技术使用者:上海振华重工(集团)股份有限公司
技术研发日:2022.11.22
技术公布日:2023/3/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1