快速倾倒水下清淤机器人料斗的制作方法
1.本实用新型涉及暗涵清淤设备制造技术领域,特别是涉及一种快速倾倒水下清淤机器人料斗。
背景技术:
2.随着城市化进程加剧,许多城市河道空间不断被侵占、挤压,河道上方被人为铺设水泥板,再在水泥板上覆盖路基或房基,修桥、修路、建楼房等,原有的河道就改造成了暗涵。伴随着大量污水被直排入暗涵,黑暗、密闭的河道空间内随之产生厌氧发臭、淤泥沉积等问题,如果不对这些“黑臭”通道加以整治,将严重影响城市环境、破坏城市形象。
3.然而,由于暗涵清理需要在密闭空间作业,而暗涵内淤泥经多年沉积,聚积着大量有毒有害气体,施工人员需佩戴防毒面具作业,施工安全隐患大、效率低;此外,由于汛期降雨频繁,施工风险较高,多数工程只能抢抓非雨季施工,时间短、工期紧、任务重,人工清淤施工难度极大,费时费力;因此,一种水下清淤机器人应运而生。水下清淤机器人是一种可通过计算机遥控,自动在暗涵内行走,完成一系列清淤作业的机器人。为提高清淤效率可将料斗与清淤设备采取分离式设计,并设置两个料斗交替使用,但料斗内的垃圾在清理过程中会遇到以下问题:1、由于暗涵内的垃圾中存在大量淤泥,附着在料斗内壁上,难以倾倒干净,因此需要工作人员攀爬至车斗内部用铁锹彻底清除残存的大量垃圾,从而增加了清淤人员的工作量;2、倾倒料斗时,需吊起料斗端部的两个吊点,此时料斗会在车斗中滑动或者晃动,从而增加了清淤人员的安全风险;3、垃圾倾倒过程效率低,导致另一个料斗内装满垃圾后无法及时倾倒至车斗中,清淤设备再无料斗可用,影响清淤效率。
4.为解决以上问题,进一步提高清淤机器人料斗倾倒的可操作性、安全性并减少垃圾倾倒的时间,因此,有必要设计一种改进的快速倾倒水下清淤机器人料斗。
技术实现要素:
5.本实用新型的目的在于提供一种能使垃圾倾倒更彻底,倾倒过程更安全,同时明显提升垃圾倾倒效率的快速倾倒水下清淤机器人料斗。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种快速倾倒水下清淤机器人料斗,包括车斗、与所述车斗上方活动连接的料斗以及活动连接于所述料斗顶部的吊架;所述车斗的上边缘处滑动连接有第一定位块和第二定位块,所述第一定位块和所述第二定位块的上方均开设有便于第一定位轴和第二定位轴安装的u形圆槽,所述第一定位轴通过沿轴向前后设置的两个圆环与所述第一定位块相互抵接,所述第二定位轴通过沿轴向前后设置的两个所述圆环与所述第二定位块相互抵接,以实现所述圆环对所述第一定位轴和所述第二定位轴沿轴向移动时的限位作用;设置于所述料斗底部前侧外壁上的第一定位钢板活动连接于所述第一定位轴上,设置于所述料斗底部后侧外壁上的第二定位钢板活动连接于所述第二定位轴上,以实现所述料斗定位于所述车斗的上方;所述料斗的后方开设有旋转门,所述料斗的上方设置有第一吊耳和第二吊耳,
所述吊架的下方匹配设置有多个吊孔,所述吊架通过所述吊孔与所述料斗上方的所述第一吊耳和所述第二吊耳活动连接。
8.作为本实用新型的进一步改进,所述第一吊耳左右对称设置于所述料斗的前方上边缘处,所述第二吊耳左右对称设置于所述料斗的后方上边缘处;所述吊孔对应设置于所述第一吊耳和所述第二吊耳的正上方,所述吊孔通过等长的钢丝绳和吊钩与所述第一吊耳和所述第二吊耳活动连接。
9.作为本实用新型的进一步改进,所述第一定位块和所述第二定位块滑动连接于所述车斗的上边缘两侧,所述第一定位块左右对称设置于所述车斗的前方,所述第二定位块左右对称设置于所述车斗的后方。
10.作为本实用新型的进一步改进,所述车斗的两侧外壁上对称设置有两条标尺,所述标尺紧邻所述第一定位块和所述第二定位块的下边缘处设置。
11.作为本实用新型的进一步改进,所述第一定位块和所述第二定位块通过螺栓固定于所述车斗的上边缘处。
12.作为本实用新型的进一步改进,所述第一定位钢板与所述第二定位钢板的下方均设有开口,所述第一定位钢板的下方开口呈八字形设置,所述第二定位钢板的下方开口呈倒u形设置且入口处配设有倒角。
13.作为本实用新型的进一步改进,所述第一定位轴至所述第二定位轴之间的距离与所述第一定位钢板的下方开口至所述第二定位钢板的下方开口之间的距离相等,以保证所述料斗能成功定位于所述车斗的上方。
14.作为本实用新型的进一步改进,两个所述第一定位钢板左右对称设置于所述料斗底部的前侧外壁上,两个所述第二定位钢板左右对称设置于所述料斗底部的后侧外壁上。
15.作为本实用新型的进一步改进,所述料斗的底部安装有耐磨且摩擦系数小的尼龙板。
16.作为本实用新型的进一步改进,所述旋转门的顶端通过合页与所述料斗转动连接。
17.作为本实用新型的进一步改进,所述旋转门的两侧设置有直角锁扣。
18.本实用新型的有益效果是:
19.1.本实用新型的快速倾倒水下清淤机器人料斗,通过在料斗的后方安装旋转门,底部安装耐磨且摩擦系数小的尼龙板,使料斗在倾斜较小角度的情况下,也能使垃圾顺利从料斗内滑出,避免了料斗倾翻,也使垃圾倾倒得更彻底,同时也使倾倒更方便,显著降低了清淤人员的工作强度,提升了清淤效率。
20.2.本实用新型的快速倾倒水下清淤机器人料斗,通过在车斗上方设置定位轴,并在料斗底部安装定位钢板,实现了根据需要精确控制料斗在车斗上方的定位,使垃圾的倾倒位置实现可控,同时定位钢板的下方开口根据实际需要分别设置呈八字形和倒u形,不仅方便了钢板的落入和脱离,而且也便于实现料斗绕轴旋转,提升了本装置的可操作性也避免了倾倒过程中料斗产生滑动或者晃动,显著降低了清淤人员的安全风险。
21.3.本实用新型的快速倾倒水下清淤机器人料斗,通过设置有多个吊孔的吊架和等长的钢丝绳,保证了起吊过程中料斗的垂直方向均匀受力,同时也有效避免了料斗承受水平方向的拉力,从而有效防止了料斗变形损坏,延长了料斗的使用寿命。
22.4.本实用新型的快速倾倒水下清淤机器人料斗,通过设置直角锁扣,方便了工作人员快速开关旋转门,而且当直角锁扣关闭时,也使得料斗在装载垃圾的过程中不会轻易被料斗内的垃圾撞击开,实现了自锁功能,确保了料斗的承载功能。
附图说明
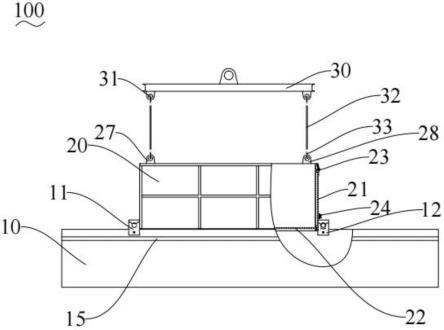
23.图1为本实用新型的快速倾倒水下清淤机器人料斗的结构示意图。
24.图2为本实用新型的快速倾倒水下清淤机器人料斗的立体结构示意图。
25.图3为本实用新型的快速倾倒水下清淤机器人料斗的俯视结构示意图。
26.图4为本实用新型的图2中a处的放大图。
27.图5为本实用新型的图3中b处的放大图。
28.图6为本实用新型的第一定位钢板的结构示意图(左)和第二定位钢板的结构示意图(右)。
29.附图标记
30.100-快速倾倒水下清淤机器人料斗;10-车斗;11-第一定位块;12-第二定位块;13-第一定位轴;14-第二定位轴;15-标尺;16-螺栓;17-圆环;20-料斗;21-旋转门;22-尼龙板;23-合页;24-直角锁扣;25-第一定位钢板;26-第二定位钢板;261-倒角;27-第一吊耳;28-第二吊耳;30-吊架;31-吊孔;32-钢丝绳;33-吊钩。
具体实施方式
31.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
32.在此,还需要说明的是,为了避免因不必要的细节而模糊了本实用新型,在附图中仅仅示出了与本实用新型的方案密切相关的结构和/或处理步骤,而省略了与本实用新型关系不大的其他细节。
33.另外,还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
34.请参阅图1至图6所示,本实用新型提供了一种快速倾倒水下清淤机器人料斗100,包括车斗10、与车斗10上方活动连接的料斗20以及活动连接于料斗20顶部的吊架30;车斗10的上方活动连接有第一定位轴13和第二定位轴14,料斗20的底部外侧对应设置有第一定位钢板25和第二定位钢板26。如此设置,可通过移动第一定位轴13和第二定位轴14的位置,控制料斗20定位于车斗10上方的位置,从而对垃圾倾倒于车斗10内的位置实现精确调控,确保了垃圾倾倒时能够均匀合理地分布于车斗内,同时也便于根据车斗10内垃圾的分布情况随时调整料斗20在车斗10上方的定位。
35.具体的,请参阅图1并结合图2、图3所示,第一定位轴13通过第一定位块11与车斗10活动连接,第二定位轴14通过第二定位块12与车斗10活动连接,第一定位块11和第二定位块12均滑动连接于车斗10的上边缘两侧,两个第一定位块11左右对称设置于车斗10的前方,两个第二定位块12左右对称设置于车斗10的后方。相应的,两个第一定位钢板25左右对
称设置于料斗20底部的前侧外壁上,两个第二定位钢板26左右对称设置于料斗20底部的后侧外壁上,第一定位钢板25与第二定位钢板26的下方均设有开口。与此同时,车斗10的两侧外壁上对称设置有两条标尺15,标尺15紧邻在第一定位块11和第二定位块12的下边缘处设置。如此设置,可以通过对照标尺15首先确定好第一定位块11和第二定位块12之间的间距,从而将第一定位轴13至第二定位轴14之间的距离调整为与第一定位钢板25的下方开口至第二定位钢板26的下方开口之间的距离相等,以保证第一定位钢板25的下方开口和第二定位钢板26的下方开口刚好能落在第一定位轴13和第二定位轴14上,从而实现料斗20能成功定位在车斗10上方的目标位置。
36.具体的,请参阅图5所示,当对照标尺15准确定位好第一定位块11和第二定位块12的位置后,通过螺栓16将其牢固地固定在车斗10的上边缘处,以避免料斗20放置的过程中,第一定位块11和第二定位块12受力产生滑动,导致第一定位钢板25和第二定位钢板26难以准确放置在第一定位轴13和第二定位轴14上。
37.具体的,请参阅图4所示,第一定位块11和第二定位块12的上方均开设有u形圆槽,以方便第一定位轴13和第二定位轴14的固定安装。
38.具体的,请参阅图2所示,第一定位轴13通过沿轴向前后设置的两个圆环17与第一定位块11相互抵接,第二定位轴14也通过沿轴向前后设置的两个圆环17与第二定位块12相互抵接,以防止两根定位轴沿轴向移动。
39.进一步的,请参阅图6所示,第一定位钢板25的下方开口呈八字形设置,第二定位钢板26的下方开口呈倒u形设置且入口处配设有倒角261。如此设置,既方便了第一定位钢板25快速落入和脱离第一定位轴13;同时也方便了第二定位钢板26在落入第二定位轴14后能够实现绕轴旋转,从而可实现在料斗20的倾倒过程中,料斗20底部的一端固定,另一端绕轴旋转,进而便于控制料斗20倾斜一定的角度,同时也有效避免了传统技术中倾倒垃圾的过程中料斗20在车斗10内滑动或者晃动给清淤人员带来的安全隐患。
40.请参阅图2所示,料斗20的后方开设有旋转门21,旋转门21的顶端通过合页23与料斗20转动连接,旋转门21的两侧左右对称设置有直角锁扣24。如此设置,工作人员只需站在车斗10的两侧,徒手掰开直角锁扣24并通过起重机将料斗20的前侧拉起,使料斗20倾斜一定角度,就能够实现将垃圾快速倾倒至下方车斗10中。避免了靠人力清理垃圾时费时费力;同时也使员工无需爬入车斗10内作业,降低了安全隐患。此外,直角锁扣24的设置不仅能快速开关旋转门21,而且当直角锁扣24关闭时,也使得料斗20在装载垃圾的过程中不会轻易被料斗20内的垃圾撞击开,实现了自锁功能,确保了不会影响到料斗20的承载功能。
41.具体的,请参阅图1所示,在一些实施例中,料斗20的底部安装有耐磨且摩擦系数小的尼龙板22,如此设置,可以利用尼龙板22兼具耐磨和摩擦系数小的优点,一方面有效延长料斗20的使用寿命,另一方面能够实现在减小料斗20倾斜角度的情况下,也能使垃圾顺利从料斗20内滑出,从而避免了料斗20倾翻,保证了操作的安全性;同时,也能使垃圾的倾倒过程进行的更彻底,有效减少了垃圾对料斗底部的黏附。同时,本领域的技术人员应当理解,尼龙板22也可替换为其他摩擦系数较小的材料并不应妨碍取得类似技术效果。
42.料斗20的上方设置有第一吊耳27和第二吊耳28,其中,第一吊耳27左右对称设置于料斗20的前方上边缘处,第二吊耳28左右对称设置于料斗20的后方上边缘处;相应的,吊架30的下方匹配设置有四个吊孔31,吊孔31对应设置在第一吊耳27和第二吊耳28的正上
方;四个吊孔31通过四根等长的钢丝绳32和吊钩33与料斗20上方的四个吊耳活动连接。如此设置,当起重机通过吊架30将料斗20吊起时,能够保证料斗20上方的四个起吊点均匀受力,同时,由于整个起吊过程中钢丝绳32始终垂直于地面,也有效避免了料斗20承受水平方向的作用力,从而防止了料斗20变形损坏,也确保了料斗20于车斗10上方的定位过程能够长期有效的顺利进行,延长了料斗20的使用寿命。也明显缩短了所需设置钢丝绳32的长度,从而减小了起吊高度,减少起吊时间,提升了垃圾倾倒的效率。此外,在倾倒料斗20内垃圾的过程中,只需将吊钩33与第二吊耳28脱离开,再由起重机通过第一吊耳27将料斗20一端拉起,使料斗20倾斜一定角度后方能使垃圾顺利从料斗20内滑出,如此设置,操作简单方便,进一步提升了垃圾倾倒的效率。
43.下面对本实用新型的快速倾倒水下清淤机器人料斗100工作原理进行说明:
44.使用时,根据料斗20上第一定位钢板25和第二定位钢板26下方开口的距离及车斗10内垃圾的分布情况,参考标尺15上的刻度,将第一定位块11和第二定位块12布置在车斗10上边缘处的相应位置,通过螺栓16紧固。随后将第一定位轴13和第二定位轴14放入定位块上方的u形圆槽内。
45.当暗涵内清淤机器人料斗20内装满清淤垃圾时,清淤机器人将料斗20升高至暗涵洞口处。通过吊钩33及钢丝绳32将吊架30与料斗20连接,起重机将吊架30与料斗20整体吊起放置在第一定位轴13和第二定位轴14上。在料斗20侧边,通过直角锁扣24将旋转门21打开,脱开料斗20顶部后方第二吊耳28上的吊钩33及钢丝绳32。起重机将吊架30拉起,进而带动料斗20的前端升高并脱离第一定位轴13,料斗20后端绕第二定位轴14顺时针旋转,料斗20整体倾斜,料斗20内垃圾沿尼龙板22滑落至车斗10内。
46.待料斗20内垃圾倾倒干净,起重机将吊架30降低,料斗20前端降低并落在第一定位轴13上,料斗20后端绕第二定位轴14逆时针旋转,料斗20整体放平。通过直角锁扣24将旋转门21关闭,挂上料斗20顶部第二吊耳28上的吊钩33及钢丝绳32。起重机将吊架30与料斗20整体吊离车斗10,完成倾倒过程。
47.综上所述,本实用新型公开的快速倾倒水下清淤机器人料斗100,通过在料斗20的后方安装旋转门21,底部安装耐磨且摩擦系数小的尼龙板22,使料斗20在倾斜较小角度的情况下,也能使垃圾顺利从料斗20内滑出,避免了料斗20倾翻,也使垃圾倾倒得更彻底,同时也使倾倒更方便,显著降低了清淤人员的工作强度,提升了清淤效率;通过在车斗10上方设置定位轴,并在料斗20底部安装定位钢板,实现了根据需要精确控制料斗20在车斗10上方的定位,使垃圾的倾倒位置实现可控,同时定位钢板的下方开口根据实际需要分别设置呈八字形和倒u形,不仅方便了钢板的落入和脱离,而且也便于实现料斗20绕轴旋转,提升了本装置的可操作性也避免了倾倒过程中料斗产生滑动或者晃动,显著降低了清淤人员的安全风险;通过设置有多个吊孔31的吊架30和等长的钢丝绳32,保证了起吊过程中料斗20的垂直方向均匀受力,避免了料斗20承受水平方向的拉力,从而有效防止了料斗20变形损坏,延长了料斗20的使用寿命;通过设置直角锁扣24,方便了工作人员快速开关旋转门21,而且当直角锁扣24关闭时,也使得料斗20在装载垃圾的过程中不会轻易被料斗20内的垃圾撞击开,实现了自锁功能,确保了料斗20的承载功能。因此,本装置中各部件密切配合,显著提升了垃圾的倾倒效率,也使垃圾的倾倒过程进行得更彻底,使得倾倒过程更安全。
48.以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对
本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1