一种环保水治理用水体垃圾打捞设备的制作方法
1.本实用新型涉及水体治理技术领域,具体为一种环保水治理用水体垃圾打捞设备。
背景技术:
2.随着人民生活水平的提高以及工业、旅游业的高速发展,所带来的生活和工业垃圾也日益增多。尤其是人员居住生活较密集的市政河流水面上,浮游垃圾、工业固体废物、腐烂的动植物污染物等满布水面,严重污染了水源。市场上现存的部分水体垃圾打捞设备采用船体配合两侧固定的网状结构将垃圾聚集回收,但其连接方式采用焊或螺栓固定的形式导致打捞网出现损坏需要维护替换等情况时不便于使用者进行操作,且操作十分繁琐不便。
技术实现要素:
3.本实用新型的目的在于提供一种环保水治理用水体垃圾打捞设备,以解决上述背景技术中市场上现存的部分水体打捞设备的打捞网不便于拆装的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种环保水治理用水体垃圾打捞设备,包括无人船,所述无人船的顶部固定安装有承载板,且承载板的两端底部均固定安装有承载框,所述承载框内固定安装有限位机构,且限位机构内固定安装有回收网框,所述无人船的左右两侧均固定安装有导流板。
5.可选的,所述限位机构包括校准槽,且四个校准槽以矩形阵列的形式开设在承载框的顶部,所述校准槽内活动嵌合有校准栓,且承载框的顶部搭接有稳定臂,所述稳定臂内活动嵌合有嵌合栓,且嵌合栓的底部固定安装在承载框的顶部,所述嵌合栓内活动嵌合有插入栓,且插入栓的一端延伸至稳定臂的外部,所述稳定臂的底部固定安装有定位框,且定位框的左右两侧分别固定安装在每两个校准栓相对的一侧,且回收网框固定安装在定位框的底部。
6.可选的,所述导流板的俯剖面呈三角形,且导流板的一侧与水平面的夹角为40
°
。
7.可选的,所述回收网框的正面剖面呈u形,且回收网框的俯剖面呈u形。
8.可选的,所述插入栓的一侧与水平面的夹角为40
°
,且插入栓位于稳定臂外部的一端表面均匀开设有磨砂纹。
9.可选的,所述校准槽的俯剖面与校准栓的俯剖面均呈矩形,且校准槽的俯剖面与校准栓的俯剖面的面积相同。
10.本实用新型的技术效果和优点:
11.1、通过使用者控制无人船在水面进行移动并随着水流与导流板的引导带动水体垃圾流向回收网框内部,而随着回收网框移动至使用者回收点时工作人员能够对汇聚的垃圾进行回收十分便捷。
12.2、通过插入栓的一侧与水平面的夹角为40
°
使插入栓在出现晃动偏移时能够借助
重力随斜面复位以防其出现脱落等情况,且插入栓位于稳定臂外部的一端表面均匀开设有磨砂纹提高了插入栓与使用者手部接触时所产生的摩擦力,以防使用者在操作过程中出现位置偏移等情况。
附图说明
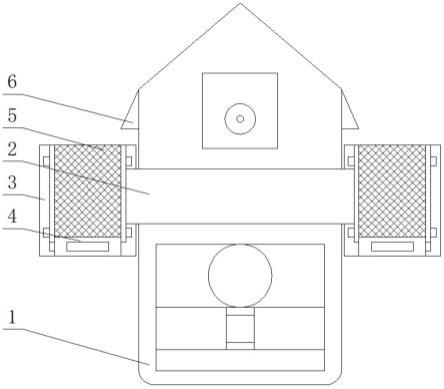
13.图1为本实用新型结构的俯面示意图;
14.图2为本实用新型限位机构结构的示意图;
15.图3为本实用新型承载框结构的正面剖面示意图。
16.图中:1无人船、2承载板、3承载框、4限位机构、401校准槽、402校准栓、403稳定臂、404嵌合栓、405插入栓、5回收网框、6导流板。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
18.本实用新型提供了如图1-3所示的一种环保水治理用水体垃圾打捞设备,包括无人船1,无人船1的顶部焊接有承载板2,且承载板2的两端底部均焊接有承载框3,承载框3内焊接有限位机构4,且限位机构4内焊接有回收网框5,无人船1的左右两侧均焊接有导流板6,导流板6的俯剖面呈三角形,且导流板6的一侧与水平面的夹角为40
°
,回收网框5的正面剖面呈u形,且回收网框5的俯剖面呈u形。
19.通过使用者控制无人船在水面进行移动并随着水流与导流板6的引导带动水体垃圾流向回收网框5内部,而随着回收网框5移动至使用者回收点时工作人员能够对汇聚的垃圾进行回收十分便捷。
20.限位机构4包括校准槽401,且四个校准槽401以矩形阵列的形式开设在承载框3的顶部,校准槽401内活动嵌合有校准栓402,且承载框3的顶部搭接有稳定臂403,校准槽401的俯剖面与校准栓402的俯剖面均呈矩形,且校准槽401的俯剖面与校准栓402的俯剖面的面积相同。
21.稳定臂403内活动嵌合有嵌合栓404,且嵌合栓404的底部焊接在承载框3的顶部,嵌合栓404内活动嵌合有插入栓405,插入栓405的一侧与水平面的夹角为40
°
,且插入栓405位于稳定臂403外部的一端表面均匀开设有磨砂纹,这样设置使插入栓405在出现晃动偏移时能够借助重力随斜面复位以防其出现脱落等情况,且插入栓405位于稳定臂403外部的一端表面均匀开设有磨砂纹提高了插入栓405与使用者手部接触时所产生的摩擦力,以防使用者在操作过程中出现位置偏移等情况。
22.且插入栓405的一端延伸至稳定臂403的外部,稳定臂403的底部焊接有定位框406,且定位框406的左右两侧分别焊接在每两个校准栓402相对的一侧,且回收网框5焊接在定位框406的底部。
23.当回收网框5出现损坏等情况时仅需随斜面取出插入栓405使稳定臂403的活动能力不再受限,使用者仅需向上提拉便能取出定位框406与回收网框5以便于使用者进行维护替换,而使用者取出新的回收网框5进行反向操作完成复位,此时借助校准栓402的存在使
回收网框5无法进行横向移动,而插入栓405保证了回收网框5无法进行纵向移动以保证使用过程中的稳定性。
技术特征:
1.一种环保水治理用水体垃圾打捞设备,包括无人船(1),其特征在于:所述无人船(1)的顶部固定安装有承载板(2),且承载板(2)的两端底部均固定安装有承载框(3),所述承载框(3)内固定安装有限位机构(4),且限位机构(4)内固定安装有回收网框(5),所述无人船(1)的左右两侧均固定安装有导流板(6)。2.根据权利要求1所述的一种环保水治理用水体垃圾打捞设备,其特征在于:所述限位机构(4)包括校准槽(401),且四个校准槽(401)以矩形阵列的形式开设在承载框(3)的顶部,所述校准槽(401)内活动嵌合有校准栓(402),且承载框(3)的顶部搭接有稳定臂(403),所述稳定臂(403)内活动嵌合有嵌合栓(404),且嵌合栓(404)的底部固定安装在承载框(3)的顶部,所述嵌合栓(404)内活动嵌合有插入栓(405),且插入栓(405)的一端延伸至稳定臂(403)的外部,所述稳定臂(403)的底部固定安装有定位框(406),且定位框(406)的左右两侧分别固定安装在每两个校准栓(402)相对的一侧,且回收网框(5)固定安装在定位框(406)的底部。3.根据权利要求1所述的一种环保水治理用水体垃圾打捞设备,其特征在于:所述导流板(6)的俯剖面呈三角形,且导流板(6)的一侧与水平面的夹角为40
°
。4.根据权利要求1所述的一种环保水治理用水体垃圾打捞设备,其特征在于:所述回收网框(5)的正面剖面呈u形,且回收网框(5)的俯剖面呈u形。5.根据权利要求2所述的一种环保水治理用水体垃圾打捞设备,其特征在于:所述插入栓(405)的一侧与水平面的夹角为40
°
,且插入栓(405)位于稳定臂(403)外部的一端表面均匀开设有磨砂纹。6.根据权利要求2所述的一种环保水治理用水体垃圾打捞设备,其特征在于:所述校准槽(401)的俯剖面与校准栓(402)的俯剖面均呈矩形,且校准槽(401)的俯剖面与校准栓(402)的俯剖面的面积相同。
技术总结
本实用新型公开了一种环保水治理用水体垃圾打捞设备,涉及水体治理技术领域,包括无人船,所述无人船的顶部固定安装有承载板,且承载板的两端底部均固定安装有承载框,所述承载框内固定安装有限位机构,且限位机构内固定安装有回收网框,所述无人船的左右两侧均固定安装有导流板。本实用新型在使用过程中,通过回收网框出现损坏等情况时仅需随斜面取出插入栓使稳定臂的活动能力不再受限,使用者仅需向上提拉便能取出定位框与回收网框以便于使用者进行维护替换,而使用者取出新的回收网框进行反向操作完成复位,此时借助校准栓的存在使回收网框无法进行横向移动,而插入栓保证了回收网框无法进行纵向移动以保证使用过程中的稳定性。的稳定性。的稳定性。
技术研发人员:蒋轶威 唐星 陈立群
受保护的技术使用者:湖南源邦环保工程有限公司
技术研发日:2022.04.06
技术公布日:2022/12/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1