一种建筑工程地基施工用打桩装置的制作方法
1.本实用新型涉及建筑施工技术领域,具体为一种建筑工程地基施工用打桩装置。
背景技术:
2.打桩,指把桩打进地里,使建筑物基础坚固,打桩是工程建设的基础,随着科技的进步打桩逐步舍弃了人工打桩,采用打桩机进行打桩,打桩机是指把桩打入地层的建筑机械,现有的打桩机是由卷扬机用吊钩将桩锤提升,脱钩后沿导向架自由下落而打桩,打桩过程桩子缺少限位支撑,容易倾斜影响打桩的质量,每次都需要较长的时间,打桩效率低下,为此,我们提出一种建筑工程地基施工用打桩装置。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种建筑工程地基施工用打桩装置,打桩过程对木桩进行辅助支撑,打桩效率较高,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种建筑工程地基施工用打桩装置,包括底板、限位机构和打桩机构;
5.底板:其上表面的四角均设有安装孔,底板上表面的中部设有矩形柱,矩形柱前端的滑槽内通过轴承转动连接有螺纹杆,螺纹杆的中部螺纹连接有滑动板,滑动板与滑槽滑动连接,滑动板的上端设有矩形台;
6.限位机构:设置于底板的上表面,限位机构的后端与矩形柱下端的圆孔固定连接;
7.打桩机构:设置于滑动板的中部,打桩机构的右端与矩形台固定连接,打桩机构与限位机构上下位置对应,在打桩时对桩子进行辅助支撑,防止桩子晃出,提高打桩的精准度,便于操作,减轻工作人员的负担,高频的撞击使得桩子产生连续的震动,提高打桩效率。
8.进一步的,还包括plc控制器,所述plc控制器设置于矩形柱的右侧面,plc控制器的输入端电连接外部电源,控制各电器的工作。
9.进一步的,还包括电机一,所述电机一设置于矩形柱的上表面,电机一输出轴的下端与螺纹杆的上端固定连接,plc控制器的输出端电连接电机一的输入端,带动螺纹杆转动。
10.进一步的,所述限位机构包括电动推杆、双向齿条板、转轴、齿牙和夹紧板,所述电动推杆设置于矩形柱下端的圆孔内,电动推杆伸缩端的前侧设有双向齿条板,底板上表面的中部通过转轴对称转动连接有夹紧板,夹紧板后端的外弧面均设有圆周阵列的齿牙,齿牙分别与双向齿条板啮合连接,plc控制器的输出端电连接电动推杆的输入端,对桩子进行扶持防止偏移。
11.进一步的,所述打桩机构包括偏心轮、圆盘、电机、弹簧、滑动柱和保护套,所述滑动柱滑动连接于滑动板中部的滑孔内,滑动柱的上端设有圆盘,滑动柱的中部活动套设有弹簧,弹簧位于圆盘和滑动板之间,矩形台的上端设有电机,电机输出轴的左端设有偏心
轮,偏心轮与圆盘的上表面滑动连接,滑动板的下表面设有保护套,滑动柱位于保护套的内部,滑动柱的中心轴线与两个夹紧板前端弧面的中心轴线重合,plc控制器的输出端电连接电机的输入端,撞击桩子,使其下移。
12.进一步的,所述打桩机构还包括冲击板,所述冲击板设置于滑动柱的下端,增加强度,防止滑动柱损坏。
13.进一步的,还包括距离传感器,所述距离传感器设置于矩形柱滑槽的顶壁,plc控制器与距离传感器双向电连接,检测打桩的深度。
14.与现有技术相比,本实用新型的有益效果是:本建筑工程地基施工用打桩装置,具有以下好处:
15.1、plc控制器控制电动推杆收缩,电动推杆的伸缩端带动双向齿条板后移,双向齿条板通过齿牙带动夹紧板转动,两侧的夹紧板沿着转轴做方向相反的转动,对桩子外弧面的下端进行扶持,plc控制器控制电动推杆伸出,电动推杆的伸缩端带动双向齿条板后移,双向齿条板通过齿牙带动夹紧板转动,两侧的夹紧板沿着转轴做方向相反的转动,将桩子的外弧面下端松开,在打桩时对桩子进行辅助支撑,防止桩子晃出,提高打桩的精准度,便于操作,减轻工作人员的负担。
16.2、桩子的上端套设于保护套的内部,此时plc控制器控制电机一和电机转动,电机的输出带动偏心轮转动,当偏心轮的远心端与圆盘接触时,圆盘下移,下移至偏心轮远心端的端头与圆盘接触时,圆盘由于惯性继续下移,带动滑动柱沿着滑孔向下滑动,滑动柱带动冲击板撞击桩子,桩子向下运动插入地面,当偏心轮的近心端于圆盘接触时,弹簧将圆盘顶起,圆盘带动滑动柱上移,使得冲击板与桩子之间分开,滑动板向下滑动使得冲击板能够一直撞击桩子,对桩子进行撞击,使得桩子下移,高频的撞击使得桩子产生连续的震动,提高打桩效率。
附图说明
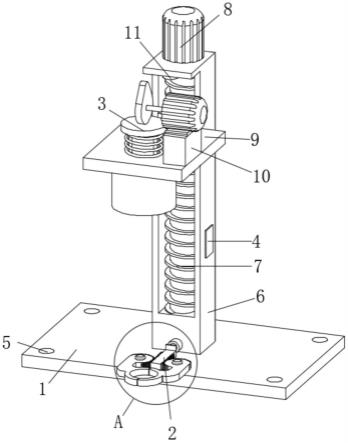
17.图1为本实用新型结构示意图;
18.图2为本实用新型打桩机构的结构示意图;
19.图3为本实用新型a处放大的结构示意图。
20.图中:1底板、2限位机构、21电动推杆、22双向齿条板、23转轴、24齿牙、25夹紧板、3打桩机构、31偏心轮、32圆盘、33电机、34弹簧、35滑动柱、36保护套、37冲击板、4plc控制器、5安装孔、6矩形柱、7螺纹杆、8电机一、9滑动板、10矩形台、11距离传感器。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-3,本实施例提供一种技术方案:一种建筑工程地基施工用打桩装置,包括底板1、限位机构2和打桩机构3;
23.底板1:其上表面的四角均设有安装孔5,安装打桩装置,底板1上表面的中部设有
矩形柱6,矩形柱6前端的滑槽内通过轴承转动连接有螺纹杆7,螺纹杆7的中部螺纹连接有滑动板9,滑动板9与滑槽滑动连接,滑动板9的上端设有矩形台10,螺纹杆7转动,使得滑动板9沿着滑槽下移;
24.限位机构2:设置于底板1的上表面,限位机构2的后端与矩形柱6下端的圆孔固定连接,限位机构2包括电动推杆21、双向齿条板22、转轴23、齿牙24和夹紧板25,电动推杆21设置于矩形柱6下端的圆孔内,电动推杆21伸缩端的前侧设有双向齿条板22,底板1上表面的中部通过转轴23对称转动连接有夹紧板25,夹紧板25后端的外弧面均设有圆周阵列的齿牙24,齿牙24分别与双向齿条板22啮合连接,plc控制器4的输出端电连接电动推杆21的输入端,电动推杆21收缩,电动推杆21的伸缩端带动双向齿条板22后移,双向齿条板22通过齿牙24带动夹紧板25转动,两侧的夹紧板25沿着转轴23做方向相反的转动,对桩子外弧面的下端进行扶持;
25.打桩机构3:设置于滑动板9的中部,打桩机构3的右端与矩形台10固定连接,打桩机构3与限位机构2上下位置对应,打桩机构3包括偏心轮31、圆盘32、电机33、弹簧34、滑动柱35和保护套36,滑动柱35滑动连接于滑动板9中部的滑孔内,滑动柱35的上端设有圆盘32,滑动柱35的中部活动套设有弹簧34,弹簧34位于圆盘32和滑动板9之间,矩形台10的上端设有电机33,电机33输出轴的左端设有偏心轮31,偏心轮31与圆盘32的上表面滑动连接,滑动板9的下表面设有保护套36,滑动柱35位于保护套36的内部,滑动柱35的中心轴线与两个夹紧板25前端弧面的中心轴线重合,plc控制器4的输出端电连接电机33的输入端,打桩机构3还包括冲击板37,冲击板37设置于滑动柱35的下端,桩子的上端套设于保护套36的内部,桩子的上端面与冲击板37下表面之间的距离适度大于偏心轮31远心端与圆盘32的上表面之间的距离,电机33的输出带动偏心轮31转动,当偏心轮31的远心端与圆盘32接触时,圆盘32下移,下移至偏心轮31远心端的端头与圆盘32接触时,圆盘32由于惯性继续下移,带动滑动柱35沿着滑孔向下滑动,滑动柱35带动冲击板37撞击桩子,桩子向下运动插入地面,当偏心轮31的近心端于圆盘32接触时,弹簧34将圆盘32顶起,圆盘32带动滑动柱35上移,使得冲击板37与桩子之间分开。
26.其中:还包括plc控制器4,plc控制器4设置于矩形柱6的右侧面,plc控制器4的输入端电连接外部电源,控制各电器的工作。
27.其中:还包括电机一8,电机一8设置于矩形柱6的上表面,电机一8输出轴的下端与螺纹杆7的上端固定连接,plc控制器4的输出端电连接电机一8的输入端,电机一8转动,电机一8的输出轴带动螺纹杆7转动。
28.其中:还包括距离传感器11,距离传感器11设置于矩形柱6滑槽的顶壁,plc控制器4与距离传感器11双向电连接,距离传感器11可以检测自身与滑动板9上表面之间的距离并将距离信息传递给plc控制器4处理。
29.本实用新型提供的一种建筑工程地基施工用打桩装置的工作原理如下:将底板1通过安装孔5安装在车辆的固定台上端,将桩子竖直立起来,plc控制器4控制电动推杆21收缩,电动推杆21的伸缩端带动双向齿条板22后移,双向齿条板22通过齿牙24带动夹紧板25转动,两侧的夹紧板25沿着转轴23做方向相反的转动,对桩子外弧面的下端进行扶持,电机一8转动,电机一8的输出轴带动螺纹杆7转动,使得滑动板9沿着滑槽下移,桩子的上端套设于保护套36的内部,桩子的上端面与冲击板37下表面之间的距离适度大于偏心轮31远心端
与圆盘32的上表面之间的距离,此时plc控制器4控制电机一8和电机33转动,电机33的输出带动偏心轮31转动,当偏心轮31的远心端与圆盘32接触时,圆盘32下移,下移至偏心轮31远心端的端头与圆盘32接触时,圆盘32由于惯性继续下移,带动滑动柱35沿着滑孔向下滑动,滑动柱35带动冲击板37撞击桩子,桩子向下运动插入地面,当偏心轮31的近心端于圆盘32接触时,弹簧34将圆盘32顶起,圆盘32带动滑动柱35上移,使得冲击板37与桩子之间分开,滑动板9向下滑动使得冲击板37能够一直撞击桩子,距离传感器11可以检测自身与滑动板9上表面之间的距离并将距离信息传递给plc控制器4处理,当滑动板9下移至指定距离后plc控制器4控制电机33和电机8停止工作,plc控制器4控制电动推杆21伸出,电动推杆21的伸缩端带动双向齿条板22后移,双向齿条板22通过齿牙24带动夹紧板25转动,两侧的夹紧板25沿着转轴23做方向相反的转动,将桩子的外弧面下端松开。
30.值得注意的是,以上实施例中所公开的plc控制器4可选用s7-300控制器,电动推杆21可选用dtw1600电动推杆,电机一8可选用y100l1-4电机,电机33可选用y90l-2电机,距离传感器11可选用ldm4x距离传感器,plc控制器4控制引电动推杆21、电机一8、电机33和距离传感器11工作采用现有技术中常用的方法。
31.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1