一种水上漂浮垃圾清理无人船的制作方法
1.本实用新型涉及无人船技术领域,具体涉及一种水上漂浮垃圾清理无人船。
背景技术:
2.水面漂浮垃圾的污染日益严重,水面漂浮垃圾除了有沿岸单位、居民或游客抛弃的各类杂物如包装袋、泡沫饭盒等,水面船舶弃置的容器、塑料袋等,一些如水葫芦、水浮莲、浮萍、绿萍等迷路的水生植物,也能算是水面漂浮垃圾。这种水面漂浮垃圾不仅会污染破坏水源环境,也会影响市容。
3.水面漂浮物垃圾清理通常采用人工方式对漂浮杂物进行拦截与打捞。该方式费时费力,效率低下。对此有些地方会使用机械清理的方式,但大部分都是采用较大型机械,不仅浪费能源,而且容易产生二次污染。
技术实现要素:
4.本实用新型的目的是针对现有技术存在的不足,提供一种水上漂浮垃圾清理无人船。
5.为实现上述目的,本实用新型提供了一种水上漂浮垃圾清理无人船,包括船体,船体包括左船体和右船体,左船体和右船体一端通过连接体连通,左船体和右船体之间设有垃圾收集机构和垃圾箱,垃圾箱和船体之间滑动连接,船体上还设有与垃圾箱连接的提箱机构,左船体和右船体相连的一端上均设有推进机构;提箱机构为两个,分别设置在左船体和右船体上,且两个提箱机构对称设置,提箱机构包括与船体固定连接的立板、设置在立板外侧的电动卷扬机,立板上端可转动连接有换向滚筒,垃圾箱顶部固定连接有绳索的一端,绳索架设经过换向滚筒且绳索另一端与电动卷扬机连接;船体内部设有空腔,空腔内设有蓄电池和控制器,控制器分别与蓄电池、垃圾收集机构、电动卷扬机和推进机构连接,控制器无线连接有遥控终端。
6.进一步的,垃圾收集机构包括与船体固定连接的固定架,固定架上端两侧分别固定连接有倾斜设置的挡板,挡板高的一端朝内,低的一端朝外,两个挡板之间上侧可转动连接有主动轴,下侧可转动连接有从动轴,主动轴与从动轴之间通过传送履带传动连接,传送履带上设有若干沥水孔,主动轴一端传动连接有电机,电机与挡板固定连接,电机与控制器连接。
7.进一步的,两个挡板之间上侧的下部铰接有导向板,导向板下侧的两端分别与固定架之间铰接有电动伸缩杆,两个电动伸缩杆分别与控制器连接。
8.进一步的,固定架外端两侧均固定连接有外扩的栏板,栏板外端可转动连接有防撞筒,栏板上还设有若干通水孔。
9.进一步的,垃圾箱上设有若干网孔,垃圾箱靠近连接体的一侧铰接有箱门,箱门与垃圾箱之间还连接有扣锁。
10.进一步的,推进机构包括电动螺旋桨。
11.进一步的,船体上固定连接有罩壳,垃圾箱一侧的罩壳上铰接有盖板。
12.有益效果:本实用新型结构简单、紧凑,整体体积小,适用范围广,能在较小的河道、池塘内工作,有较大的垃圾存储空间,有效清理水面的漂浮垃圾;垃圾收集机构与水面接触面积较大,一定程度上提高了打捞效率;提箱机构的设计使得无人船的垃圾箱清理工作简单便捷。
附图说明
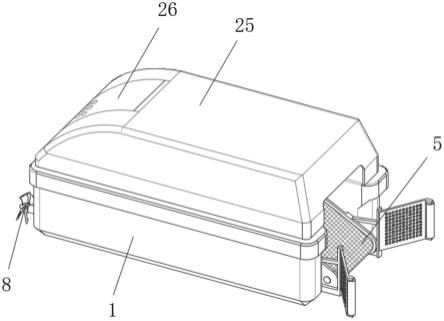
13.图1是本实用新型实施例的水上漂浮垃圾清理无人船的结构示意图;
14.图2是本实用新型实施例的内部结构示意图;
15.图3是本实用新型实施例的图2中a区放大图;
16.图4是本实用新型实施例的垃圾收集机构的结构示意图;
17.图5是本实用新型实施例的垃圾收集机构取下传送履带后的结构示意图;
18.图6是本实用新型实施例的垃圾箱的结构示意图。
19.图中:1、船体;2、左船体;3、右船体;4、连接体;5、垃圾收集机构;6、垃圾箱;7、提箱机构;8、电动螺旋桨;9、固定架;10、挡板;11、主动轴;12、从动轴;13、传送履带;14、电机;15、导向板;16、电动伸缩杆;17、栏板;18、防撞筒;19、立板;20、电动卷扬机;21、换向滚筒;22、绳索;23、箱门;24、扣锁;25、罩壳;26、盖板。
具体实施方式
20.下面结合附图和具体实施例,进一步阐明本实用新型,本实施例在以本实用新型技术方案为前提下进行实施,应理解这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。
21.如图1至6所示,本实用新型实施例提供了一种水上漂浮垃圾清理无人船,包括船体1,船体1包括左船体2和右船体3,左船体2和右船体3一端通过连接体4连通,左船体2和右船体3之间设有垃圾收集机构5和垃圾箱6,垃圾箱6和船体1之间滑动连接,垃圾箱6两侧设有滑槽,左船体2和右船体3上分别设有一个与滑槽配合的滑条,船体1上还设有与垃圾箱6连接的提箱机构7,左船体2和右船体3相连的一端上均设有推进机构,即推进机构为两个,一左一右设置,推进机构优选电动螺旋桨8,电动螺旋桨8与船体1之间采用常规安装方式即可。船体1内部设有空腔,空腔内设有蓄电池和控制器,控制器分别与蓄电池、垃圾收集机构5、提箱机构7和推进机构连接,控制器还无线连接有遥控终端。
22.垃圾收集机构5包括与船体1固定连接的固定架9,固定架9上端两侧分别固定连接有倾斜设置的挡板10,挡板10高的一端朝内,低的一端朝外,两个挡板10之间上侧可转动连接有主动轴11,下侧可转动连接有从动轴12,主动轴11与从动轴12之间通过传送履带13传动连接,传送履带13上设有若干沥水孔,用于去除垃圾附带的水,还可在传送履带13上设置若干凸块,以便更好的运输水面漂浮的垃圾,需要说明的是传送履带13低的一端位于水面之下。主动轴11一端传动连接有电机14,电机14与挡板10固定连接,电机14与控制器连接。两个挡板10之间上侧的下部铰接有导向板15,导向板15下侧的两端分别与固定架9之间铰接有电动伸缩杆16,两个电动伸缩杆16分别与控制器连接,导向板15用于将垃圾引导落入垃圾箱6中。固定架9外端两侧均固定连接有外扩的栏板17,栏板17外端可转动连接有防撞
筒18,栏板17上还设有若干通水孔。
23.提箱机构7为两个,分别设置在左船体2和右船体3上,且两个提箱机构7对称设置,提箱机构7包括与船体1固定连接的立板19、设置在立板19外侧的电动卷扬机20,立板19上端可转动连接有换向滚筒21,垃圾箱6顶部固定连接有绳索22的一端,绳索22架设经过换向滚筒21且绳索22另一端与电动卷扬机20连接,换向滚筒21两侧的立板19高于换向滚筒21以避免绳索22错位,电动卷扬机20与控制器连接。启动电动卷扬机20,正转绳索22收起,垃圾箱6上移,反转绳索22放下,垃圾箱6下移。在垃圾箱6移动行程的两端还分别设有与控制器连接的限位开关,此为常用现有技术不做赘述。
24.垃圾箱6上设有若干网孔,垃圾箱6靠近连接体4的一侧铰接有箱门23,箱门23与垃圾箱6之间还连接有扣锁24,打开箱门23便于对垃圾箱6中垃圾进行清理。船体1上固定连接有罩壳25,垃圾箱6一侧的罩壳25上铰接有盖板26,盖板26宽度大于垃圾箱6宽度,盖板26上端与罩壳25铰接,下端与船体1上表面之间通过搭扣连接,盖板26上开设有若干通孔,减少无人船行驶时的空气阻力。
25.需要对无人船内垃圾箱6进行清理时,打开盖板26,通过遥控终端将指令发送给控制器,控制器先控制电动伸缩杆16缩回,此时导向板15垂下,不会挡住垃圾箱6,不影响垃圾箱6的上下移动,而后控制器再控制电动卷扬机20正转,带动垃圾箱6上移,垃圾箱6内的水会从网孔中漏出,等到限位开关检测到垃圾箱6到位后,控制器控制电动卷扬机20停止,此时垃圾箱6底面高于船体1上表面,打开垃圾箱6的箱门23,能十分便捷的清理垃圾箱6内的垃圾。
26.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,其它未具体描述的部分,属于现有技术或公知常识。在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1