远程操纵装置的制作方法
本发明涉及远程操纵装置。
背景技术:
1、存在从远程地点操纵(远程操纵)作业机械的技术。为了在远程操纵作业机械时向远程地点的操纵者提供视觉信息,在作业机械上搭载影像获取装置(摄像头)。由影像获取装置(摄像头)获取的作业现场的影像显示在远程地点的操纵者的远程操纵装置所具备的显示装置上。操纵者一边确认显示装置上显示的影像,一边通过远程操纵装置来操纵作业机械。
2、例如专利文献1中公开了下述技术:通过作业机械的影像获取装置来拍摄作业现场,生成从假想视点观察的所述作业机械的假想视点图像,并将由作业机械的影像获取装置拍摄到的实际图像和假想视点图像分别显示在显示装置的同一画面的不同位置。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2019-54464号公报
技术实现思路
1、发明要解决的课题
2、在专利文献1中,通过将来自影像获取装置的作业现场影像(实际影像)和来自假想视点的影像(假想视点影像)提供给操纵者,从而能够期待抑制远程地点的远程操纵的作业效率降低。
3、在此,会产生下述课题。
4、影像传送由于通信数据量多,因此根据通信线路的状况而产生延迟。若影像传送产生延迟,则来自影像获取装置的获取影像和来自假想视点的生成影像虽然在同一画面上却分别表现不同的举动。在同一画面上显现的这些影像没有匹配的情况下,很难抑制操纵者的作业效率降低及事故危险性。
5、本发明是为了解决上述课题而提出的,目的在于提供在从远程地点操纵的作业机械中即使在具有通信延迟的情况下也能够高效安全地远程操纵的远程操纵装置。
6、用于解决课题的手段
7、为了解决上述课题,本发明的远程操纵装置具备向作业机械发送操作信号并从远程地点操纵所述作业机械的控制装置,其中,所述控制装置包括:通信控制部,其接收由摄像头拍摄到的作业现场的摄像头影像及所述作业机械的车身信息;预测轨迹运算部,其根据所述车身信息运算所述作业机械的预测轨迹,并输出用于以影像的形式显示在显示装置上的预测轨迹数据;以及显示控制部,其使所述显示装置在同一画面上显示所述摄像头影像和所述预测轨迹的影像。
8、发明效果
9、根据本发明,即使在根据通信线路的状况而影像传送产生延迟的情况下,操纵者也能够通过显示预测轨迹的影像来识别车身的当前状况。此外,通过冲抵模拟摄像头影像(基于预测轨迹生成的从摄像头观察的情况下的(模拟的)作业机械的预测影像),从而在通信线路产生延迟时显现与实际摄像头影像的差量,因此能够视觉地向操纵者提示影像延迟。因此,在从远程地点操纵的作业机械中,即使在具有通信延迟的情况下,也能够高效且安全地远程操纵。
10、上述以外的课题构成及效果可根据以下实施方式的说明获知。
技术特征:
1.一种远程操纵装置,其具备向作业机械发送操作信号并从远程地点操纵所述作业机械的控制装置,在所述远程操纵装置中,
2.根据权利要求1所述的远程操纵装置,其中,
3.根据权利要求1所述的远程操纵装置,其中,
4.根据权利要求1所述的远程操纵装置,其中,
5.根据权利要求4所述的远程操纵装置,其中,
6.根据权利要求5所述的远程操纵装置,其中,
7.根据权利要求5所述的远程操纵装置,其中,
8.根据权利要求5所述的远程操纵装置,其中,
技术总结
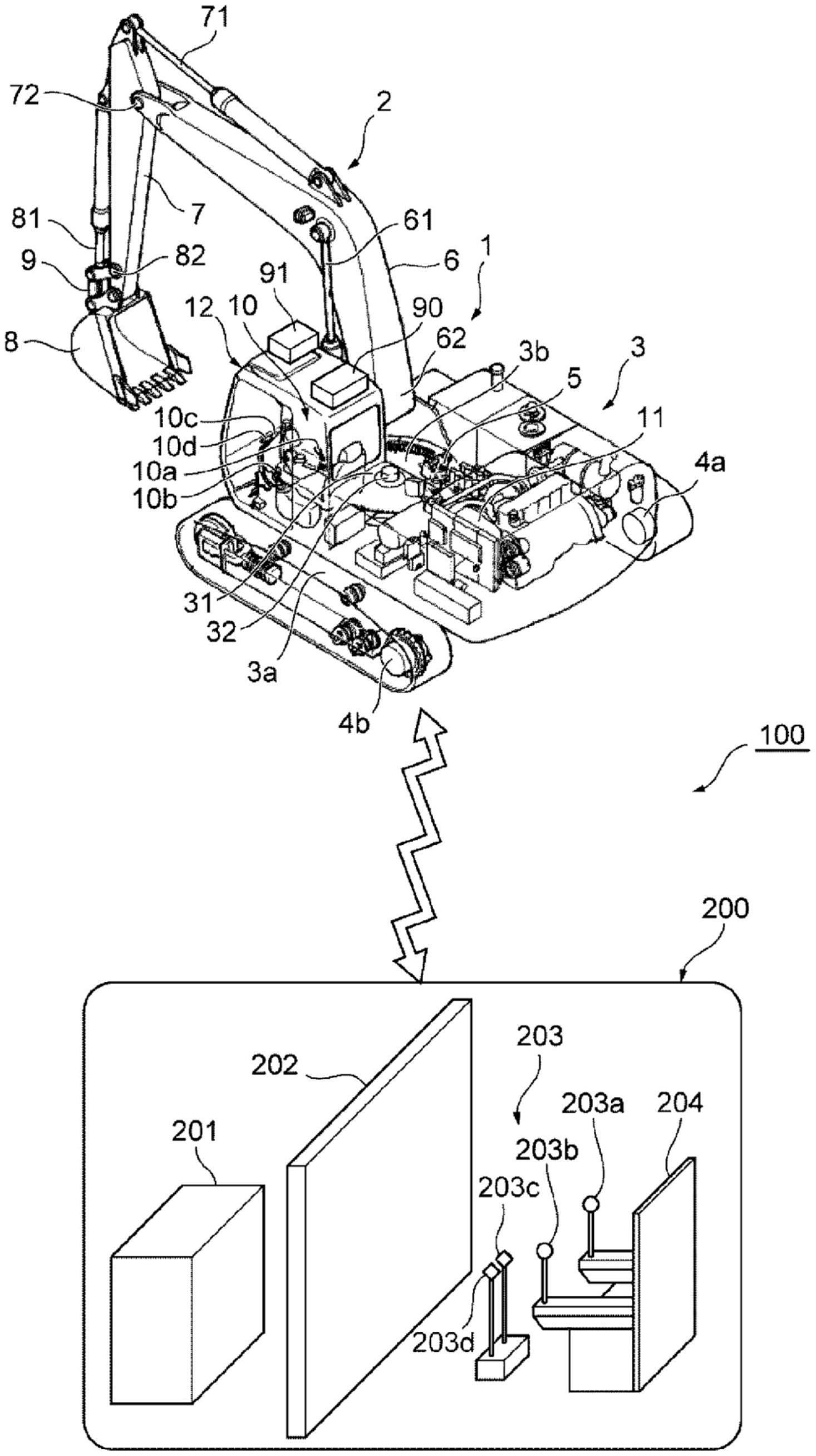
本发明提供在从远程地点操作的作业机械中即使在具有通信延迟的情况下也能够高效且安全地远程操纵的远程操纵装置。包括:通信控制部(222),其接收由车载摄像头(91)拍摄到的作业现场的摄像头影像及作业机械(液压挖掘机1)的车身信息;预测轨迹运算部(220),其根据所述车身信息运算所述作业机械(液压挖掘机1)的预测轨迹,并输出用于以影像的形式显示在显示装置(202)上的预测轨迹数据;以及显示控制部(221),其使所述显示装置(202)在同一画面上(同时)显示所述摄像头影像和所述预测轨迹的影像。
技术研发人员:笠井慎也,伊东胜道,山本慎二郎
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!