作业机械的制作方法
本发明涉及作业机械。
背景技术:
1、具有如下作业:通过液压挖掘机等的作业机械挖掘砂土,并将挖掘出的砂土向翻斗卡车等的搬运车辆装载。已知通过自动控制执行这种挖掘装载作业的技术。
2、专利文献1中公开了如下控制系统,其基于使用液压挖掘机上搭载的传感器系统测量出的地形数据,自动地计划并执行与挖掘装载作业关联的任务。该控制系统在挖掘作业的完成前和完成后、及装载作业的完成前和完成后,使用两个扫描传感器对挖掘区域、移动路径以及载货区域中的必要场所进行测量,基于测量到的数据自动地计划并执行任务。
3、专利文献2中公开了具有如下控制器的作业机械,该控制器基于测量出的地形数据来决定将从作业机的现在位置至挖掘开始位置连结的旋转路径,并使作业机按照旋转路径移动至挖掘开始位置。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2000-136549号公报
7、专利文献2:日本特开2020-020153号公报
技术实现思路
1、专利文献1以及专利文献2所述的技术中,控制器自动执行从作业机械的动作的计划至基于计划的作业机械的动作的控制为止的工作。因此,担心非管理者意图的动作会被作业机械执行。
2、本发明的目的为,提供能够恰当执行管理者有意进行的动作的作业机械。
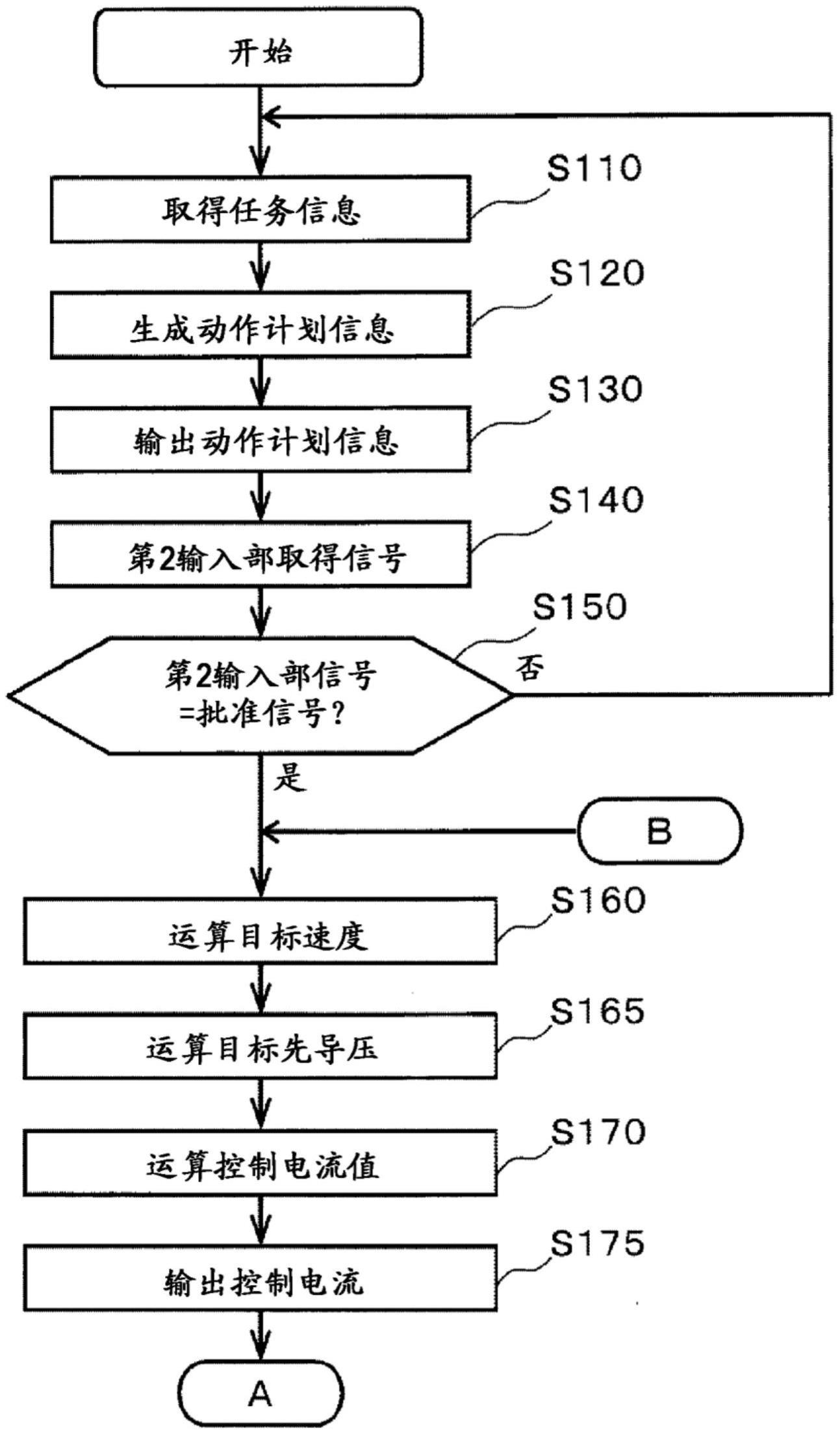
3、本发明的一个方式的作业机械具有:作业装置;检测所述作业装置的姿势信息的姿势检测装置;驱动所述作业装置的液压致动器;和控制装置,其基于外部系统取得的对于自动控制所需要的任务信息来生成动作计划信息,并基于所述动作计划信息以及所述姿势检测装置的检测结果来执行所述液压致动器的自动控制。所述控制装置构成为:将所述动作计划信息向所述外部系统输出,在没有从所述外部系统输入表示已经批准所述动作计划信息的批准信号的情况下,不执行所述自动控制,在从所述外部系统输入有所述批准信号的情况下,执行所述自动控制。
4、发明效果
5、根据本发明,能够提供能够恰当执行管理者有意进行的动作的作业机械。
技术特征:
1.一种作业机械,其具有:
2.根据权利要求1所述的作业机械,其特征在于,
3.根据权利要求2所述的作业机械,其特征在于,
4.根据权利要求1所述的作业机械,其特征在于,
5.根据权利要求1所述的作业机械,其特征在于,
6.根据权利要求1所述的作业机械,其特征在于,
7.根据权利要求6所述的作业机械,其特征在于,
8.根据权利要求1所述的作业机械,其特征在于,
9.根据权利要求8所述的作业机械,其特征在于,
技术总结
作业机械具有:作业装置;检测作业装置的姿势信息的姿势检测装置;驱动作业装置的液压致动器;和控制装置,其基于从外部系统取得的对于自动控制所需要的任务信息来生成动作计划信息,并基于动作计划信息以及姿势检测装置的检测结果执行液压致动器的自动控制。控制装置向外部系统输出动作计划信息,在没有从外部系统输入表示已经批准动作计划信息的批准信号的情况下,不执行自动控制,在从外部系统输入有批准信号的情况下,执行自动控制。
技术研发人员:石井宏纪,井村进也,山本慎二郎,盐饱晃司
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!