作业管理系统以及作业机械的制作方法
本发明涉及对在作业机械的周围进行作业的作业者的安全进行管理的作业管理系统。
背景技术:
1、土木施工现场中,担心周围作业者与作业机械接触,对于用于防止周围作业者与作业机械接触的功能具有需求。尤其,以将周围作业者与作业机械的接触防止于未然为目的,正开始将如下系统实用化,该系统将从安装于周围作业者和作业机械的传感器得到的位置信息向管理服务器集中,对作业机械的向周围作业者方向的接近和周围作业者的向侵入禁止区域的侵入等的不恰当事件进行监视、警告、显示。通过这种系统的导入,施工现场的管理者能够简便且实时地掌握在现场内发生的不恰当事件。
2、作为将周围作业者以及作业机械的位置信息向管理服务器集中并将不恰当事件向监视及管理者提示的现有技术的一例,公开了专利文献1那样的技术。专利文献1中公开了如下管理装置,其检测妨碍物的向机械周围的规定区域内的侵入,基于检测结果的履历和侵入时的关联信息,生成能够确认妨碍物的向规定区域内的侵入程度与侵入关联信息之间的关系的表。
3、现有技术文献
4、专利文献
5、专利文献1:国际公开第2018/084161号公报
技术实现思路
1、周围作业者与作业机械的接触会以周围作业者或对作业机械操作的操作员的人为过失为起因而发生。作为作业机械的操作员侧成为原因的状况,可以想到作业机械的操作员在机械动作休止中怠于锁死车身而无意图地触碰操作杆的情况、和在周围作业者的附近不留心地对作业机械进行操作的情况。另一方面,作为周围作业者侧成为原因的状况,可以想到从操作员难以视觉确认的方向向作业机械接近的情况、和怠于在接近前取得沟通的情况等。因此,为了更正确地评价接触事件的盖然性,需要考虑接近事件发生时的周围作业者与作业机械双方的状态。
2、专利文献1所记载的系统中,虽然向管理者提供接近被检测到的位置、时刻、作业机械的操作状况等信息,但并没有考虑周围作业者和作业机械的操作员各自处于何种状况。因此,管理者难以正确判断所发生的接近事件中的接触的盖然性,难以从所提供的大量接近信息中选择应运用于事后的风险评估和对现场作业者的安全教育的接近信息。由于设想了周围作业者与作业机械的接近会频繁发生,所以希望管理者能够仅将今后应改正的接近事件高效提取出来。
3、本发明是鉴于上述课题做出的,其目的为,提供能够高效提取作业机械与作业者接触的盖然性高的接近事件的作业管理系统。
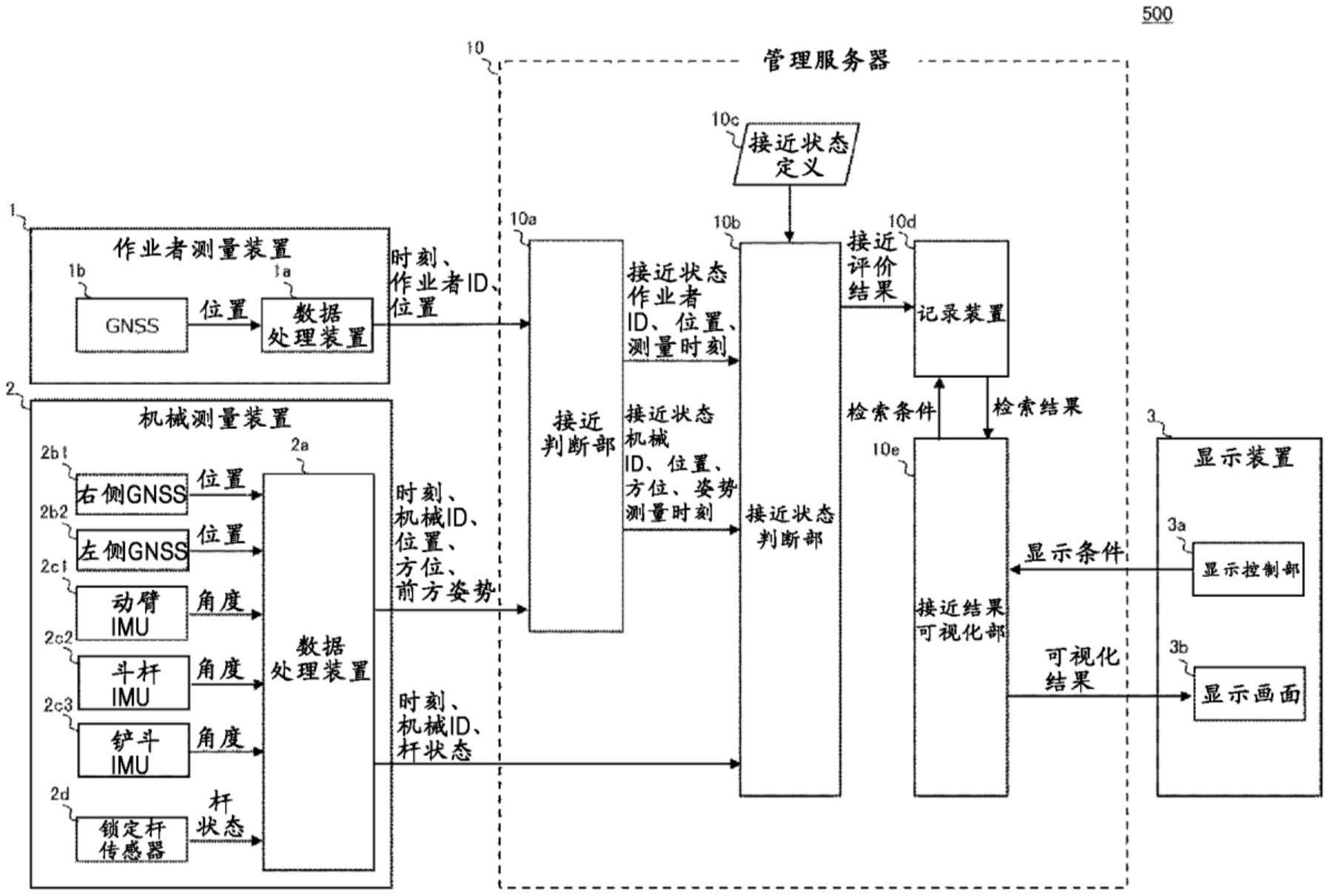
4、为了实现上述目的,本发明的作业管理系统具有:管理服务器;和显示从所述管理服务器输出的信息的显示装置,其中,所述管理服务器构成为:基于由测量作业机械的位置信息的作业机械位置测量装置测量出的所述作业机械的位置信息和由测量在所述作业机械的周围进行作业的作业者的位置信息的作业者位置测量装置测量出的所述作业者的位置信息来判断所述作业机械和所述作业者有无接近,在判断为有接近的情况下,基于预先设定的接近状态定义,根据当判断所述接近时由测量所述作业机械的状态的作业机械状态测量装置测量出的所述作业机械的状态来判断所述接近的接近状态,将在判断所述接近时测量出的所述作业机械的状态与所述接近状态对应地记录,并且与所述接近状态对应地向所述显示装置输出。
5、根据以上那样构成的本发明,作业机械与作业者接近的判断结果与将判断接近时的作业机械的状态考虑在内的接近状态对应地显示,由此,能够高效提取作业机械与作业者接触的盖然性高的接近事件。该结果为,能够大幅提高基于管理者进行的风险评估以及安全教育的效果和效率。
6、发明效果
7、根据本发明的作业管理系统,能够高效提取作业机械与作业者接触的盖然性高的接近事件。
技术特征:
1.一种作业管理系统,其具有:
2.根据权利要求1所述的作业管理系统,其特征在于,
3.根据权利要求1所述的作业管理系统,其特征在于,
4.根据权利要求1所述的作业管理系统,其特征在于,
5.根据权利要求1所述的作业管理系统,其特征在于,
6.根据权利要求5所述的作业管理系统,其特征在于,
7.根据权利要求1所述的作业管理系统,其特征在于,
8.根据权利要求1所述的作业管理系统,其特征在于,
9.根据权利要求1所述的作业管理系统,其特征在于,
10.根据权利要求1所述的作业管理系统,其特征在于,
11.根据权利要求1所述的作业管理系统,其特征在于,
12.一种作业机械,其具有:
技术总结
本申请发明的目的为,提供能够高效提取作业机械与作业者接触的盖然性高的接近事件的作业管理系统。为此,管理服务器基于由作业机械位置测量装置测量出的作业机械的位置信息和由作业者位置测量装置测量出的作业者的位置信息来判断所述作业机械和所述作业者有无接近,在判断为有接近的情况下,基于预先设定的接近状态定义,根据当判断所述接近时由作业机械状态测量装置测量出的所述作业机械的状态来判断所述接近的接近状态,将在判断所述接近时测量出的所述作业机械的状态与所述接近状态对应地记录,并且与所述接近状态对应地向显示装置输出。
技术研发人员:金泽亮,成川理优,山本慎二郎,千叶孝昭,井村进也
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!