装入机械的控制装置以及控制方法与流程
本公开涉及装入机械的控制装置以及控制方法。本申请针对2021年4月30日在日本申请的特愿2021-077392号主张优先权,并将其内容援引于此。
背景技术:
1、在专利文献1中公开了与装入机械的半自动控制有关的技术。专利文献1所涉及的半自动控制是如下那样的控制:在针对自卸车等装入目标的装入完成后,从操作员接受挖掘指示,控制装置控制装入机械的回转以及工作装置的驱动,由此进行自动挖掘。
2、在先技术文献
3、专利文献
4、专利文献1:日本特开2020-041352号公报
技术实现思路
1、发明要解决的课题
2、然而,在由操作员进行的挖掘操作后使铲斗移动至下次的挖掘位置的情况下,考虑将铲斗返回至装入开始时的位置。然而,装入开始时的位置为由操作员进行的挖掘操作的完成时铲斗所存在的位置,因此有可能作为挖掘的开始时的位置不适当。
3、本公开的目的在于,提供一种能够通过装入机械的自动控制使铲斗移动至适于开始挖掘的位置的装入机械的控制装置以及控制方法。
4、用于解决课题的手段
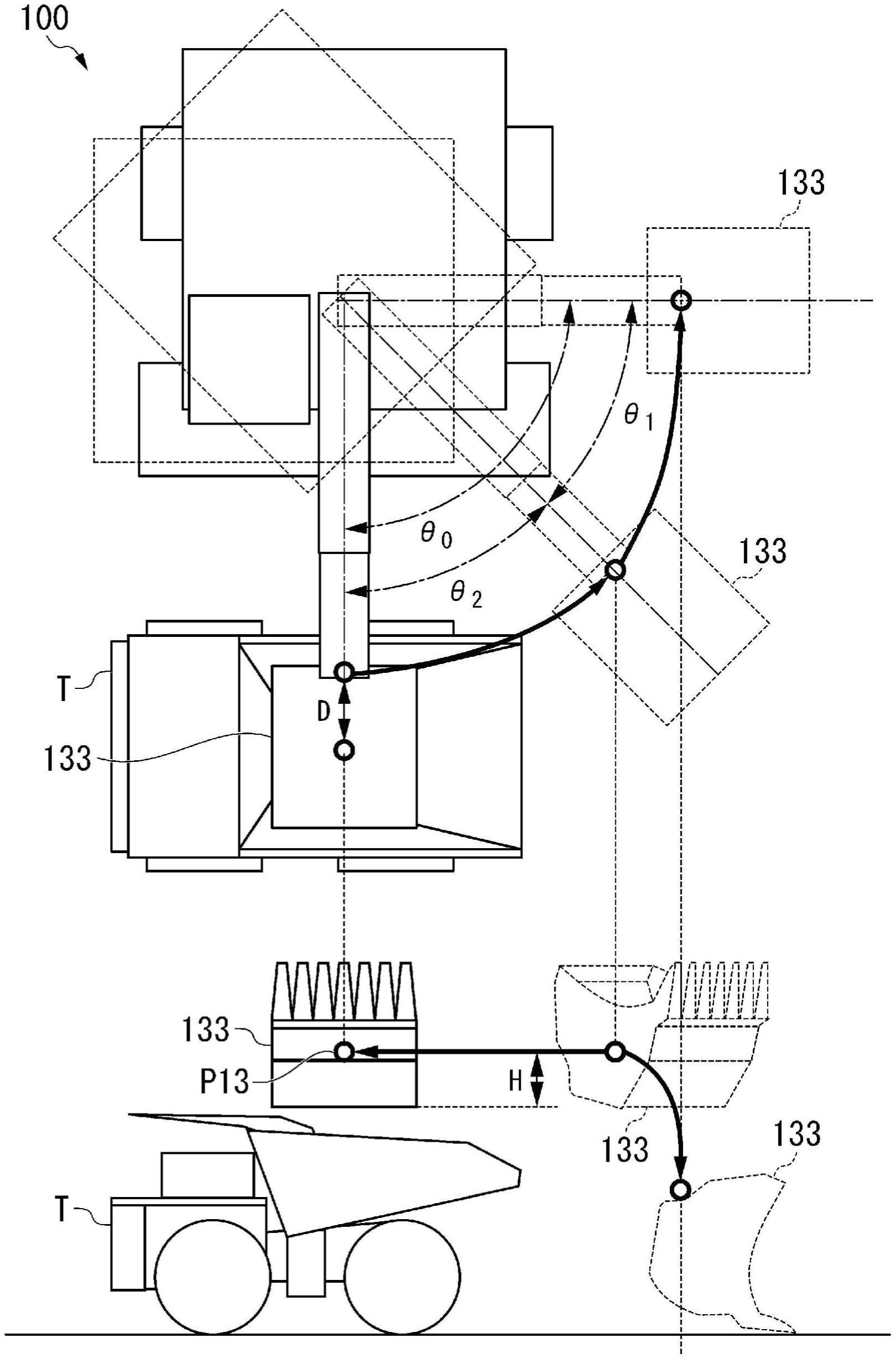
5、根据本公开的一方式,装入机械的控制装置是具备绕回转中心回转的回转体、支承所述回转体的支承部、以及具有铲斗且安装于所述回转体的工作装置的装入机械的控制装置,其中,所述装入机械的控制装置具备:开始角度确定部,其确定所述装入机械的装入开始时的所述回转体的角度即开始角度;以及移动控制部,其生成用于使所述回转体及所述工作装置进行驱动的操作信号,所述移动控制部在所述铲斗到达装入目标的上方的装入点后,输出使所述回转体驱动至所述回转体的角度成为所述开始角度为止的操作信号,且输出使所述工作装置驱动至所述铲斗相对于所述回转体的姿势成为与所述装入开始时的所述铲斗的姿势不同地预先设定的目标姿势为止的操作信号。
6、发明效果
7、根据上述方式,装入机械的控制装置能够通过装入机械的自动控制使铲斗移动至适于开始挖掘的位置。
技术特征:
1.一种装入机械的控制装置,所述装入机械具备绕回转中心回转的回转体、支承所述回转体的支承部以及具有铲斗且安装于所述回转体的工作装置,其中,
2.根据权利要求1所述的装入机械的控制装置,其中,
3.根据权利要求1或2所述的装入机械的控制装置,其中,
4.根据权利要求1至3中任一项所述的装入机械的控制装置,其中,
5.一种装入机械的控制方法,所述装入机械具备绕回转中心回转的回转体、支承所述回转体的支承部以及具有铲斗且安装于所述回转体的工作装置,其中,
技术总结
开始角度确定部确定装入机械的装入开始时的回转体的角度即开始角度。移动控制部在铲斗到达装入目标的上方的装入点后,输出使回转体驱动至回转体的角度成为开始角度为止的操作信号,且输出使工作装置驱动至铲斗相对于回转体的姿势成为与装入开始时的铲斗的姿势不同地预先设定的目标姿势为止的操作信号。
技术研发人员:畠一寻,西乡雄祐
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!