作业机械的控制系统、作业机械、以及作业机械的控制方法与流程
本发明涉及一种作业机械的控制系统、作业机械、以及作业机械的控制方法。
背景技术:
1、在作业机械相关的技术领域中,已知有例如专利文献1所公开的基于目标施工面对挖掘对象进行挖掘的技术。作为基于目标施工面对挖掘对象进行挖掘的技术,已知有机器引导技术和机器控制技术,该机器引导技术是将表示目标施工面与作业机的相对位置的导引图像提示给作业机械的操作员,该机器控制技术是对操作员的操作进行辅助控制,以使作业机按照目标施工面动作。
2、专利文献1:国际公开第2015/167022号
技术实现思路
1、在基于目标施工面对挖掘对象进行挖掘的情况下,需要计算作业机械的位置及方位角。利用全球定位卫星系统(gnss:global navigationsatellite system)计算出作业机械的位置及方位角。如果发生gnss的定位不良,那么很难计算出作业机械的位置及方位角。
2、本公开的目的在于,在发生了gnss的定位不良的情况下计算作业机械的位置及方位角。
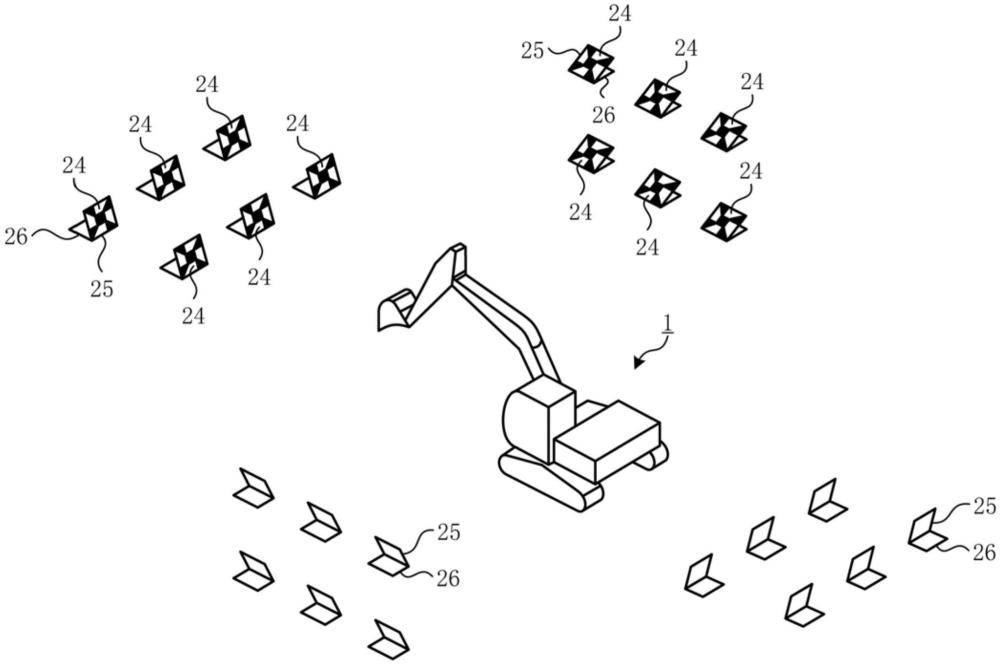
3、本发明提供一种作业机械的控制系统,所述作业机械具备行走体及回转体,所述控制系统具备位置方位计算部,该位置方位计算部基于设置在作业机械外部的多个目标物的图像和回转体的倾斜角来计算回转体的位置及方位角。
4、根据本公开,在发生了gnss的定位不良的情况下,也能够计算作业机械的位置及方位角。
技术特征:
1.一种作业机械的控制系统,该作业机械具备行走体及回转体,所述控制系统的特征在于,具备:
2.根据权利要求1所述的作业机械的控制系统,其特征在于,具备:
3.根据权利要求2所述的作业机械的控制系统,其特征在于,具备:
4.根据权利要求3所述的作业机械的控制系统,其特征在于,
5.根据权利要求2至4中任一项所述的作业机械的控制系统,其特征在于,
6.根据权利要求5所述的作业机械的控制系统,其特征在于,
7.根据权利要求2至6中任一项所述的作业机械的控制系统,其特征在于,
8.根据权利要求1至7中任一项所述的作业机械的控制系统,其特征在于,具备:
9.根据权利要求1至8中任一项所述的作业机械的控制系统,其特征在于,
10.根据权利要求1至8中任一项所述的作业机械的控制系统,其特征在于,
11.一种作业机械,其特征在于,
12.一种作业机械的控制方法,该作业机械具备行走体及回转体,所述控制方法的特征在于,包括:
13.根据权利要求12所述的作业机械的控制方法,其特征在于,包括:
14.根据权利要求13所述的作业机械的控制方法,其特征在于,
15.根据权利要求12至14中任一项所述的作业机械的控制方法,其特征在于,
16.根据权利要求15所述的作业机械的控制方法,其特征在于,
17.根据权利要求12至16中任一项所述的作业机械的控制方法,其特征在于,
18.根据权利要求12至16中任一项所述的作业机械的控制方法,其特征在于,
19.根据权利要求12至18中任一项所述的作业机械的控制方法,其特征在于,
20.根据权利要求12至18中任一项所述的作业机械的控制方法,其特征在于,
技术总结
公开了具备行走体及回转体的作业机械的控制系统,其具有位置方位计算部,所述位置方位计算部基于设置在作业机械外部的多个目标物的图像及回转体的倾斜角来计算回转体的位置及方位角。
技术研发人员:厚见彰吾,园山昌司,峰后俊秀,菅原大树,松田豊久
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!