作业机械的制作方法
本发明涉及一种液压挖掘机等作业机械。
背景技术:
1、例如,在矿山运转的液压挖掘机等作业机械在高低差多的场所无论昼夜都进行挖掘作业以及装载作业。在这样的环境下,粉尘飞舞的情况较多,夜间的作业现场较暗,因此产生液压挖掘机的驾驶席的视野较差的问题。除此之外,在矿山运转的液压挖掘机的车身尺寸大,因此从驾驶席难以看到脚下的行驶履带周边。因此,若未注意到脚下的较大的台阶而行驶,则存在履带落在台阶上或液压挖掘机从台阶跌落而无法维持车身稳定性的情况。若车身变得不稳定,则导致作业的中断,生产率降低。
2、因此,作为维持作业机械的车身稳定性的技术,例如,研究了下述专利文献1所公开的液压挖掘机。即,在液压挖掘机的前部装置设置测量到铅垂下方的地面的距离的测距传感器,从下部行驶体的接地面的高度减去位于测距传感器的铅垂下方的地点的高度来求出高低差,在求出的高低差大于阈值的情况下限制液压挖掘机的行驶。由此,谋求维持车身稳定性。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2020-159142号公报
技术实现思路
1、发明所要解决的课题
2、但是,在上述专利文献1所公开的液压挖掘机中,测距传感器以与前部装置的姿势无关地朝向铅垂下方的方式可旋转地安装于前部装置,因此在前部装置的动作中在测距传感器的旋转方向上振动。存在由于这样的旋转摇晃而产生噪声,难以准确地测量距离的问题。为了准确地测量距离,例如,考虑在使前部装置的动作减速或停止时进行,但若使前部装置减速或停止,则会影响作业机械的生产率。因此,专利文献1所记载的液压挖掘机存在改善的余地。
3、本发明是为了解决这样的技术课题而完成的,其目的在于提供一种作业机械,其能够维持车身稳定性并抑制由车身不稳定引起的生产率的降低。
4、用于解决课题的手段
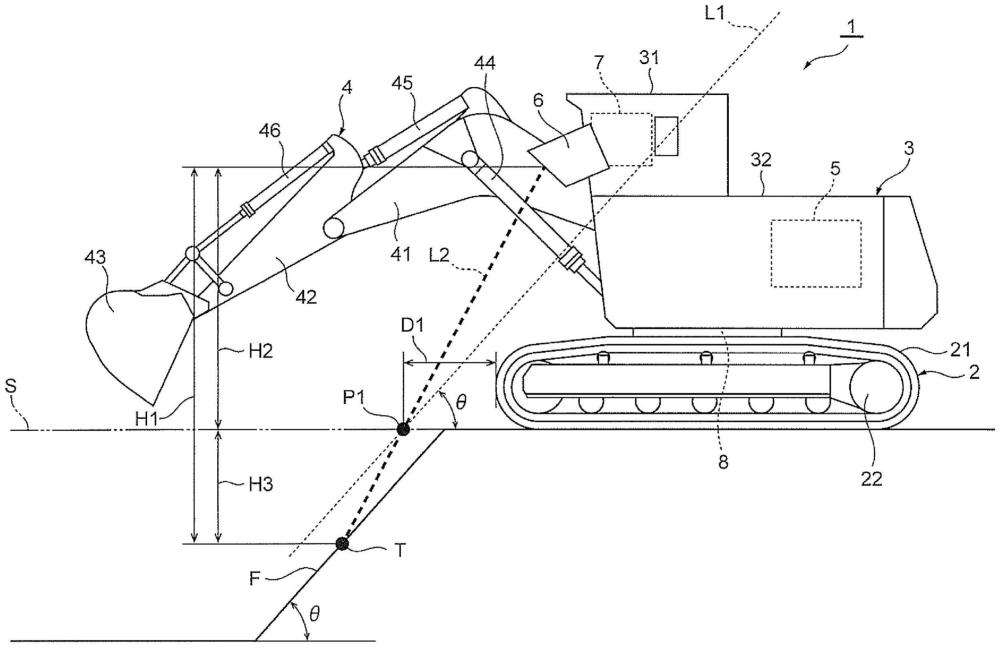
5、本发明所涉及的作业机械,具备:下部行驶体,其具有履带;以及上部回转体,其回转自如地设置于所述下部行驶体,所述作业机械的特征在于,所述作业机械具备:至少一个测距传感器,其安装于所述上部回转体;回转角度传感器,其检测所述上部回转体与所述下部行驶体的相对回转角度;通知装置,其通知所述作业机械的操作员信息;以及控制装置,其控制所述下部行驶体和所述通知装置,在将通过在所述履带的行驶平面上从所述履带离开一定距离的行驶预测点并且相对于所述履带的行驶平面具有与所述作业机械的最大爬坡角度对应的角度的直线设为第一直线、将连结所述测距传感器的安装位置与所述行驶预测点的直线设为第二直线时,所述测距传感器位于比所述第一直线靠上方,测量从该安装位置到所述第二直线上的地面的距离,在将所述测距传感器测量出的地面的区域设为行驶预测区域时,所述控制装置基于所述测距传感器的测量结果和所述回转角度传感器的检测结果来计算所述行驶预测区域的高度,判定计算出的所述行驶预测区域的高度与所述履带的行驶平面的高度的高低差是否为预先设定的阈值以上,在判定为所述高低差在所述阈值以上的情况下使所述通知装置工作。
6、在本发明所涉及的作业机械中,在将通过在履带的行驶平面上从履带离开一定距离的行驶预测点并且相对于履带的行驶平面具有与作业机械的最大爬坡角度对应的角度的直线设为第一直线、将连结测距传感器的安装位置与行驶预测点的直线设为第二直线时,测距传感器安装于上部回转体以位于比第一直线靠上方,测量从该安装位置到第二直线上的地面的距离。这样的话,测距传感器能够以比最大爬坡角度大的角度测量距离,因此能够可靠地检测高低差超过最大爬坡角度的台阶。另外,在判定为高低差在阈值以上的情况下,控制装置使通知装置工作,由此能够经由通知装置向作业机械的操作员通知该信息。其结果,即使在驾驶席的视野差的情况下,也能够使操作员注意到在行驶预测区域存在台阶。由此,能够防止履带落入台阶或作业机械从台阶跌落,因此能够维持作业机械的车身稳定性,能够抑制车身不稳定引起的生产率的下降。
7、发明的效果
8、根据本发明,能够维持车身稳定性,抑制由车身不稳定引起的生产率的降低。
技术特征:
1.一种作业机械,具备:下部行驶体,其具有履带;以及上部回转体,其回转自如地设置于所述下部行驶体,
2.根据权利要求1所述的作业机械,其特征在于,
3.根据权利要求1所述的作业机械,其特征在于,
4.根据权利要求1~3中任一项所述的作业机械,其特征在于,
5.根据权利要求1~3中任一项所述的作业机械,其特征在于,
6.根据权利要求1~3中任一项所述的作业机械,其特征在于,
7.根据权利要求1~3中任一项所述的作业机械,其特征在于,
8.根据权利要求1~7中任一项所述的作业机械,其特征在于,
9.根据权利要求1~8中任一项所述的作业机械,其特征在于,
技术总结
在作业机械(1)中,在将通过在履带(21)的行驶平面(S)上从履带(21)离开一定距离的行驶预测点(P1)并且相对于行驶平面(S)具有与最大爬坡角度(θ)相同的角度的直线设为第一直线(L1)、将连结测距传感器(6)的安装位置与行驶预测点(P1)的直线设为第二直线(L2)时,测距传感器(6)位于比第一直线(L1)靠上方,测量从该安装位置到第二直线(L2)上的地面的距离。控制装置(5)基于测距传感器(6)的测量结果和回转角度传感器(8)的检测结果计算行驶预测区域(T)的高度(H1),判定计算出的行驶预测区域(T)的高度(H1)与行驶平面(S)的高度(H2)的高低差(H3)是否在阈值以上,在判定为高低差在阈值以上的情况下使通知装置(7)工作。
技术研发人员:斋藤哲平,成川理优,西泽匡士,伊东英明,石本英史,佐藤慧
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!