用于准确地确定从装备有抓钩的作业机器的有效负载传送的系统、方法和装置与流程
本发明涉及准确地确定或识别来自作业机器的作业器具的有效负载传送。
背景技术:
1、日本专利文献jp2001-91345(“jp'345公开”)描述了一种用于液压挖掘机的作业量监测装置,其能够在负载作业期间自动且准确地测量被运输物体的负载。更具体地,jp'345公开描述了一种负载计算装置,该负载计算装置在用于铲起和运输待运输物体的旋转操作期间计算铲斗内的负载,并且在待运输物体卸载安装之后的旋转操作期间计算铲斗内的负载。jp'345公开还描述了铲斗倾倒操作检测装置,当在两个旋转操作期间负载之间的负载差处于规定值或更高时,并且当在旋转方向上的规定角度范围内执行铲斗倾倒操作时,该铲斗倾倒操作检测装置输出负载测量命令。jp'345公开还描述了一种负载测量装置,通过该负载测量装置,当负载测量命令被输出时,紧接在铲斗倾倒操作之前的负载被测量为待运输的物体的负载。
2、然而,用于在具有传统铲斗的液压挖掘机中处理有效负载(例如,负载能力、负载计算、负载测量等)的方法的应用可能不适用于具有呈抓斗或蛤壳形式的作业器具的挖掘机,传统铲斗具有与其相关联的旋转传感器(例如,各向异性磁阻(amr)传感器)以感测铲斗何时铰接以倾倒其有效负载,或者没有这种旋转传感器以感测铲斗何时铰接以倾倒其有效负载。例如,在材料在到达期望的倾倒点或卸载点或区域之前从作业器具落下的情况下,操作员执行材料的重新抓取的情况下,可能发生计算错误。也就是说,传统的系统可以将材料的滴落和重新捕获计数为两种不同材料的沉积物,即使相同的材料最终被排放到最初预期的位置。
技术实现思路
1、根据所公开的主题的一个或多个实施例的各方面,公开或实现了一种其上存储有指令的非瞬态计算机可读存储介质,所述指令在由一个或多个处理器执行时使所述一个或多个处理器执行一种方法。该方法可以包括:识别作业机器的作业器具的有效负载卸载事件的发生;确定在识别有效负载卸载事件发生时作业器具的位置是在预设作业区域中还是在预设卸载区域中;在识别有效负载卸载事件发生时确定作业器具的位置在作业区域中的第一情况下,从针对卸载材料有效负载量的计算的登记中省略有效负载卸载事件;以及在第二情况下记录有效负载卸载事件的卸载材料有效负载量的计算,在第二情况下,在识别有效负载卸载事件发生时确定作业器具的位置在卸载区域中,卸载材料有效负载量的计算增加与负载卸载事件相关联的负载量。
2、在所公开的主题的一个或多个实施例的其他方面中,公开或实现了一种用于准确地确定从具有抓钩或蛤壳作为作业器具的作业机器传送的适当的有效负载的方法。该方法可以包括:响应于对作业机器的操作员界面的输入,使用控制器设定作业机器周围的作业区域和卸载区域;使用控制器基于抓钩上的负载减少至少预定值而识别作业器具的负载卸载事件的发生;使用作业机器的位置传感器检测作业器具在识别负载卸载事件发生时的位置;使用控制器确定在识别负载卸载事件发生时检测到的作业器具的位置是在作业区域中还是在卸载区域中;在第一情况下使用控制器维持总卸载材料有效负载量,在第一情况下在识别负载卸载事件发生时确定检测位置在作业区域中;以及使用控制器增加并在存储器中保存在第二情况下的总卸载材料有效负载量,在第二情况下,在识别负载卸载事件发生时确定检测位置在卸载区域中,总卸载材料有效负载量增加负载卸载事件的负载量。
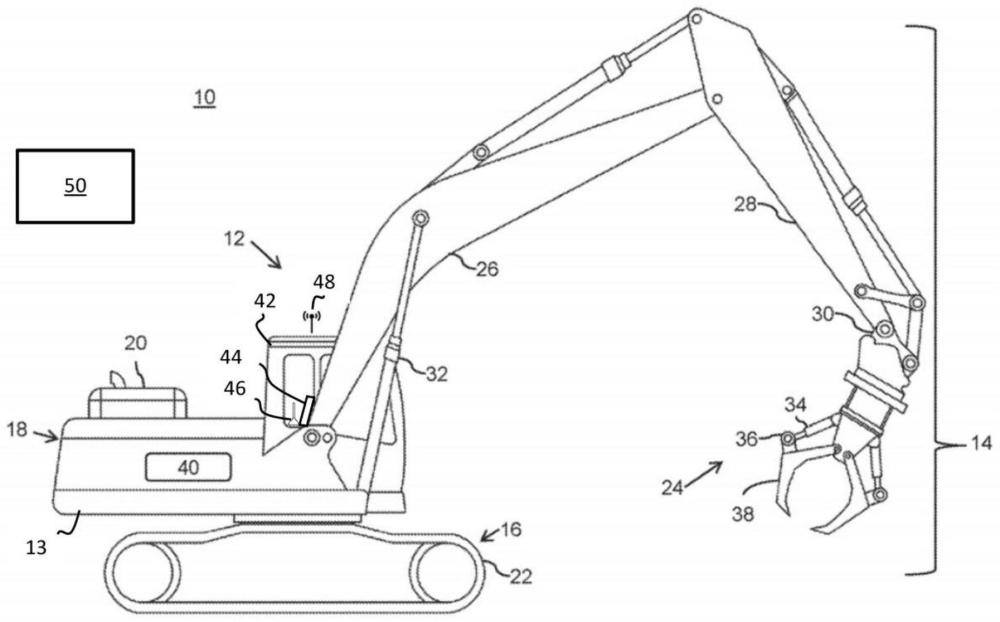
3、并且在所公开主题的一个或多个实施例的其他方面中,可以公开或提供一种作业机器。作业机器可以包括:一个底盘;由底盘支撑的操作员站,操作员站包括操作员界面和用于控制作业机器的手动控制装置;抓钩形式的作业机器,其由底盘支撑,作业机器和操作员站在作业机器的俯视平面图中可绕轴线旋转,并且抓钩可分别径向延伸到最外位置和最内位置和从最外位置和最内位置缩回;以及控制器。该控制器可以构造成响应于使用该手动控制装置的操作员输入来控制该作业器具的移动,确定该抓钩相对于该作业机器的预定作业区域和倾倒区域的位置,该预定作业区域和倾倒区域是由该作业区域与该倾倒区域之间的至少一个预设边界限定的,基于该抓钩上的负载的减少来识别该抓钩的候选倾倒事件,响应于候选倾倒事件的识别而确定抓钩的确定的位置是在作业区域中还是在倾倒区域中,将候选倾倒事件表征为无效倾倒事件,且在抓钩的确定的位置在作业区域中的第一情况下在候选倾倒事件的识别后维持倾倒材料有效负载计数,以及将候选倾倒事件表征为有效倾倒事件,并且在候选倾倒事件的识别之后抓钩的确定位置处于倾倒区域中的第二情况下增加倾倒材料有效负载计数。
4、根据以下描述和附图,本发明的其他特征和方面将是显而易见的。
技术特征:
1.一种作业机器(12),包括:
2.根据权利要求1所述的作业机器(12),其中,所述至少一个预设边界包括围绕所述轴线的圆的圆周,在所述圆周内构成所述作业区域,并且在所述圆外构成所述倾倒区域。
3.根据权利要求1所述的作业机器(12),其中,所述至少一个预设边界包括围绕所述轴线的圆的第一半径的第一部分。
4.根据权利要求3所述的作业机器(12),其中,所述至少一个预设边界包括所述圆的第二半径的第二部分,所述第二部分与所述圆的所述第一半径的所述第一部分隔开预定角度。
5.根据权利要求1所述的作业机器(12),其中,所述至少一个预设边界由从所述抓钩(38)在所述俯视平面图中的预定起始角度的角度限定。
6.根据权利要求1所述的作业机器(12),其中,所述至少一个预设边界包括至少两个预设边界,所述至少两个预设边界形成围绕所述轴线的圆的片段。
7.根据权利要求1所述的作业机器(12),其中,所述控制器(402)构造成在识别所述候选倾倒事件之前响应于对所述操作员界面(44)的输入而设定所述至少一个预设边界。
8.根据权利要求1所述的作业机器(12),
9.根据权利要求1所述的作业机器(12),其中,所述控制器(402)构造成在所述候选倾倒事件表征为所述无效倾倒事件的情况下确定紧随其后的候选倾倒事件,并将所述紧随其后的候选倾倒事件表征为所述有效倾倒事件,并增加所述倾倒材料有效负载计数。
10.一种用于准确地确定从具有抓钩(38)或蛤壳作为作业器具(24)的作业机器(12)的适当的有效负载传送的方法,所述方法包括:
技术总结
系统、方法和装置能够准确地确定从作业机器(12)的作业器具(24)的适当的有效负载传送。这样的系统、方法和装置能够识别作业器具(24)的有效负载卸载事件的发生;确定作业器具(24)在识别有效负载卸载事件的发生的位置是在预设作业区域中还是在预设卸载区域中;在作业器具(24)的位置被确定为在作业区域中的第一情况下,从对卸载材料有效负载量的计算的登记中省略有效负载卸载事件;以及在作业器具的位置被确定为在卸载区域中的第二情况下,为计算登记有效负载卸载事件。卸载材料有效负载量的计算可以增加与负载卸载事件相关联的负载量。
技术研发人员:中本洋造,青木道生,希濑启介,村田康一,田中健介
受保护的技术使用者:卡特彼勒SARL
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!