工程机械的制作方法
本发明涉及能够自动驾驶的工程机械。
背景技术:
1、在专利文献1中,公开了能够自动驾驶的施工机械。该施工机械能够自动地进行由示教(示范操作)所示范的动作,能够在执行由所述示教所示范的所述动作之前判定与该动作相关的位置是否处于允许范围,并能够在所述位置不在所述允许范围内的情况下,催促进行再次的示教。
2、但是,所述再次的示教的请求会增大进行该示教的作业者的负担。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利公开公报特开2000-291077号
技术实现思路
1、本发明的目的在于提供能够不增大作业者的负担而进行允许范围内的自动驾驶的工程机械。
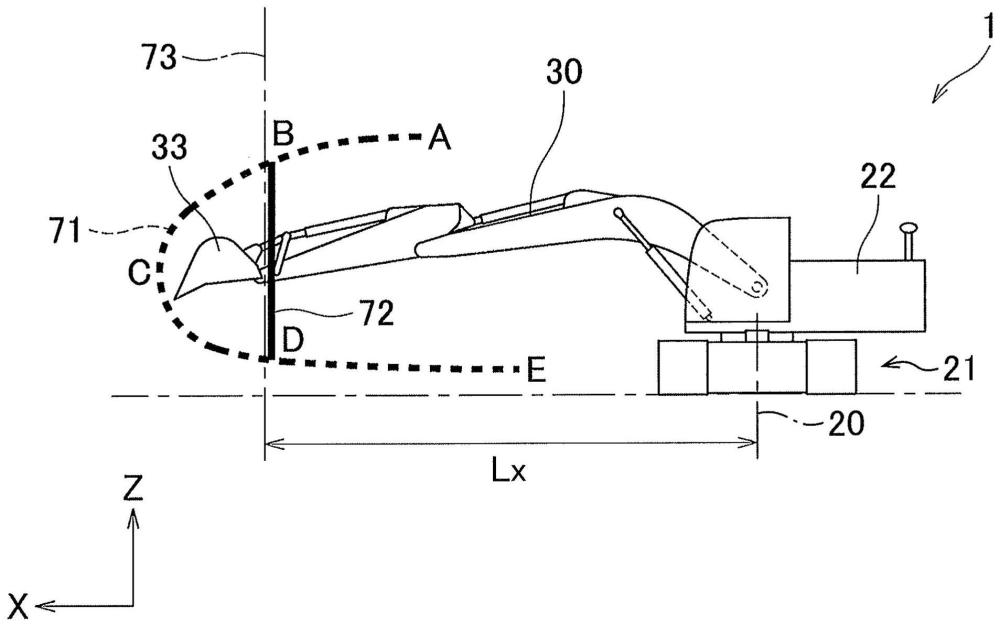
2、本发明提供工程机械,其包括下部行走体、上部回转体、作业装置及控制器。所述上部回转体能够回转地搭载于所述下部行走体。所述作业装置可进行作业动作地被安装于所述上部回转体。所述控制器以使所述上部回转体及所述作业装置进行预先指定的指定动作的方式控制所述上部回转体及所述作业装置的驱动。在所述上部回转体及所述作业装置进行所述指定动作时,在所述作业装置的限制对象部位超出预先设定的允许范围的情况下或者有可能超出预先设定的允许范围的情况下,所述控制器以使该限制对象部位不超出该允许范围的方式修正所述指定动作。
技术特征:
1.一种工程机械,其特征在于包括:
2.根据权利要求1所述的工程机械,其特征在于,
3.根据权利要求2所述的工程机械,其特征在于,
4.根据权利要求1所述的工程机械,其特征在于,
5.根据权利要求4所述的工程机械,其特征在于,
6.根据权利要求4所述的工程机械,其特征在于还包括:
7.根据权利要求1至6中任一项所述的工程机械,其特征在于,
8.根据权利要求7所述的工程机械,其特征在于,
9.根据权利要求7所述的工程机械,其特征在于,
10.根据权利要求7所述的工程机械,其特征在于,
11.根据权利要求1至4中任一项所述的工程机械,其特征在于,
12.根据权利要求11所述的工程机械,其特征在于,
13.根据权利要求12所述的工程机械,其特征在于,
14.根据权利要求1至6中任一项所述的工程机械,其特征在于,
15.根据权利要求14所述的工程机械,其特征在于,
16.根据权利要求14所述的工程机械,其特征在于,
17.根据权利要求14所述的工程机械,其特征在于,
18.根据权利要求14所述的工程机械,其特征在于,
19.根据权利要求14所述的工程机械,其特征在于,
20.根据权利要求1至6中任一项所述的工程机械,其特征在于,
21.根据权利要求1至6中任一项所述的工程机械,其特征在于,
22.根据权利要求1至6中任一项所述的工程机械,其特征在于还包括:
23.根据权利要求1至6中任一项所述的工程机械,其特征在于,
24.根据权利要求1至6中任一项所述的工程机械,其特征在于,
25.根据权利要求1至6中任一项所述的工程机械,其特征在于,
技术总结
本发明提供一种能够减轻作业者的负担并且进行自动驾驶的工程机械(1)。工程机械(1)包括控制器,以使上部回转体(22)及作业装置(30)进行指定动作的方式,控制上部回转体(22)及作业装置(30)的驱动。当在进行指定动作时,作业装置(30)的限制对象部位超出预先设定的允许范围的情况下,控制器以使限制对象部位不超出允许范围的方式修正指定动作。
技术研发人员:秋山将贵,迫树哉,野田大辅
受保护的技术使用者:神钢建机株式会社
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!