作业机械用控制系统、作业机械、作业机械的控制方法以及作业机械用控制程序与流程
本发明涉及在能够检出机体的周围的物体的作业机械中使用的作业机械用控制系统、作业机械、作业机械的控制方法以及作业机械用控制程序。
背景技术:
1、作为相关技术,公知有对在作业机械(挖掘机)的周围是否存在人进行判定的作业机械用控制系统(作业机械用周边监视装置)(例如参照专利文献1)。在被判定为门锁定杆(日文:ゲートロックレバー)处于锁定状态而作业机械未处于能够操作的状态(可作业状态)且被判定为在作业机械的周围存在人的情况下,该作业机械用控制系统将人检测标志的值设定为“1”(开启),但在该时刻,警报处理部(警报控制单元)不输出警报。之后,若门锁定杆成为锁定解除状态,切换为作业机械能够操作的状态,则不管在该时刻在作业机械的周围是否存在人,只要人检测标志的值为“1”,则作业机械用控制系统都会通过警报处理部来输出警报。
2、这样,在涉及相关技术的作业机械用控制系统中,在被判定为作业机械处于无法操作的状态且被判定为在作业机械的周围存在人的情况下,在之后被判定为作业机械处于能够操作的状态时,警报处理部输出警报。
3、专利文献1:日本特开2014-181509号公报
4、在上述相关技术中,即使在操作人员在意识到作业机械的周围存在人之后使门锁定杆成为锁定解除状态那种情况下,若作业机械成为能够操作的状态,也会输出警报。因此,对于边注意作业机械的周围的人边小心地进行作业的操作人员来说,警报讨厌,被警报分心,由此有可能导致注意力下降。另外,在上述相关技术中,如果门锁定杆处于锁定状态,则不输出警报,因此存在这样的情况,即:操作人员在未意识到作业机械的周围存在人的状态下,使门锁定杆成为锁定解除状态而移至作业机械能够操作的状态。在这种情况下,例如,为了避免作业机械突然地猛烈动作,操作人员需要注意地操作作业机械。
技术实现思路
1、本发明的目的在于提供容易减轻操作人员的注意力下降的作业机械用控制系统、作业机械、作业机械的控制方法以及作业机械用控制程序、以及容易减轻操作人员的与操作相关的负担的作业机械用控制系统、作业机械、作业机械的控制方法以及作业机械用控制程序。
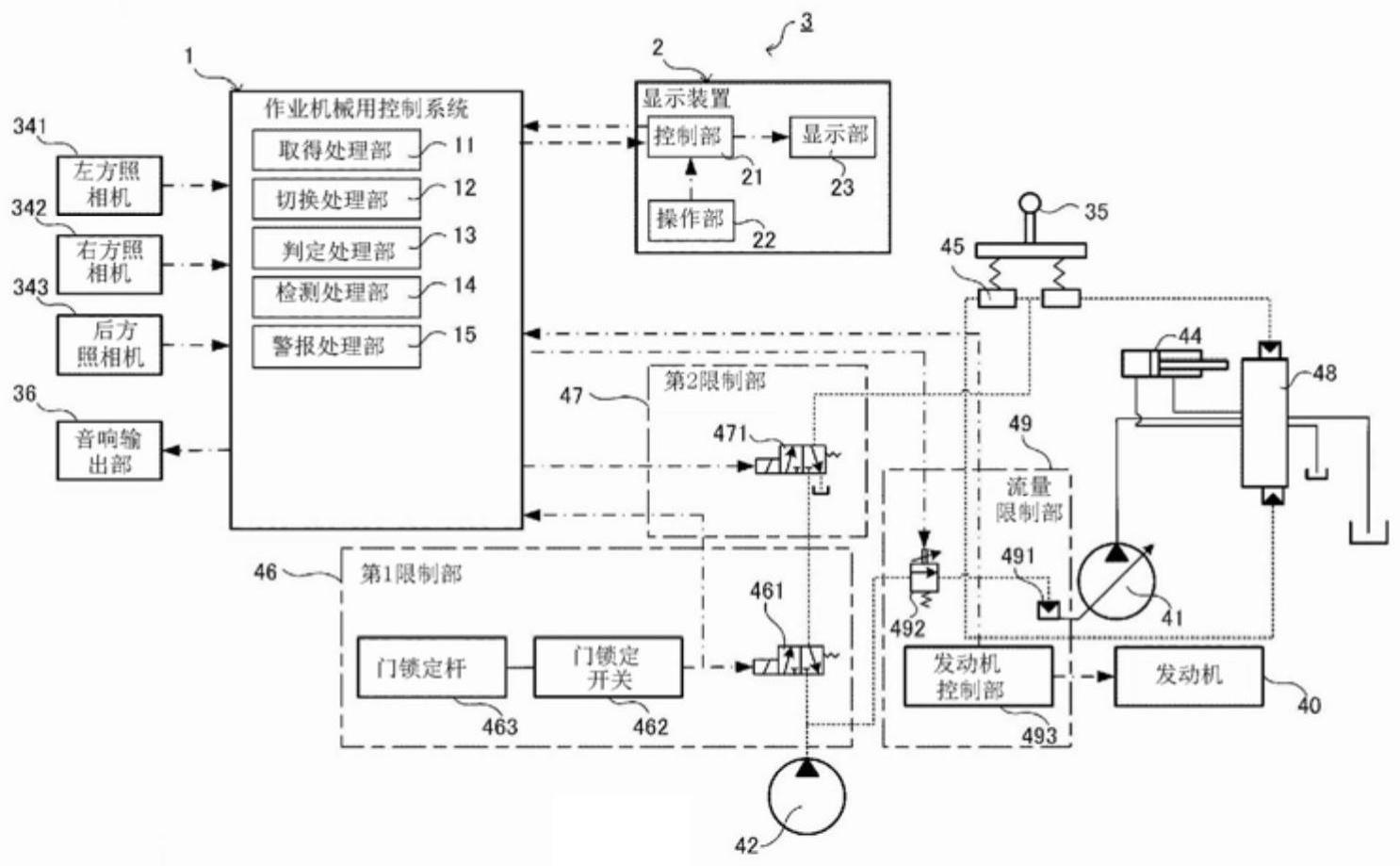
2、本发明的一个方式的作业机械用控制系统具备取得处理部、判定处理部和警报处理部。上述取得处理部取得在作业机械的机体的周围的物体的检测结果。上述判定处理部判定是处于能够操作上述作业机械的状态还是处于无法操作上述作业机械的状态。上述警报处理部进行警报的输出。在第1状况之后被判定为处于能够操作上述作业机械的状态时,上述警报处理部禁止上述警报的输出。另外,上述警报处理部在第1状况下输出上述警报,在上述第1状况之后被判定为处于能够操作上述作业机械的状态时,继续上述警报的输出。上述第1状况是被判定为处于无法操作上述作业机械的状态且上述检测结果满足规定条件的状况。
3、本发明的一个方式的作业机械具备上述作业机械用控制系统和上述机体。
4、本发明的一个方式的作业机械的控制方法具有如下步骤,即:取得在作业机械的机体的周围的物体的检测结果;判定是处于能够操作上述作业机械的状态还是处于无法操作上述作业机械的状态;以及在将被判定为处于无法操作上述作业机械的状态且上述检测结果满足规定条件的状况设为第1状况的情况下,在上述第1状况之后被判定为处于能够操作上述作业机械的状态时,禁止警报的输出。另外,本发明的一个方式的作业机械的控制方法具有如下步骤,即:取得在作业机械的机体的周围的物体的检测结果;判定是处于能够操作上述作业机械的状态还是处于无法操作上述作业机械的状态;以及在将被判定为处于无法操作上述作业机械的状态且上述检测结果满足规定条件的状况设为第1状况的情况下,在上述第1状况下,输出警报,在上述第1状况之后被判定为处于能够操作上述作业机械的状态时,继续上述警报的输出。
5、本发明的一个方式的作业机械用控制程序是用于使一个以上的处理器执行上述作业机械的控制方法的程序。
6、根据本发明,能够提供容易减轻操作人员的注意力下降的作业机械用控制系统、作业机械、作业机械的控制方法以及作业机械用控制程序、以及容易减轻操作人员的与操作相关的负担的作业机械用控制系统、作业机械、作业机械的控制方法以及作业机械用控制程序。
技术特征:
1.一种作业机械用控制系统,其特征在于,具备:
2.根据权利要求1所述的作业机械用控制系统,其特征在于,
3.根据权利要求1或2所述的作业机械用控制系统,其特征在于,
4.根据权利要求1~3中任一项所述的作业机械用控制系统,其特征在于,
5.根据权利要求1~4中任一项所述的作业机械用控制系统,其特征在于,
6.根据权利要求1~5中任一项所述的作业机械用控制系统,其特征在于,
7.一种作业机械,其特征在于,具备:
8.一种作业机械的控制方法,其特征在于,
9.一种作业机械用控制程序,其特征在于,
10.一种作业机械用控制系统,其特征在于,具备:
11.根据权利要求10所述的作业机械用控制系统,其特征在于,
12.根据权利要求10或11所述的作业机械用控制系统,其特征在于,
13.根据权利要求10~12中任一项所述的作业机械用控制系统,其特征在于,
14.根据权利要求13所述的作业机械用控制系统,其特征在于,
15.根据权利要求10~14中任一项所述的作业机械用控制系统,其特征在于,
16.一种作业机械,其特征在于,具备:
17.一种作业机械的控制方法,其特征在于,
18.一种作业机械用控制程序,其特征在于,
技术总结
提供两种作业机械用控制系统、作业机械、作业机械的控制方法以及作业机械用控制程序,一种容易减轻操作人员的注意力下降,另一种容易减轻操作人员的操作负担。作业机械用控制系统具备取得处理部、判定处理部和警报处理部。取得处理部取得在作业机械的机体的周围的物体的检测结果。判定处理部判定是能够操作作业机械的状态还是无法的状态。警报处理部进行警报的输出。在第1状况之后被判定为处于能够操作作业机械的状态时,警报处理部禁止警报的输出。另外,警报处理部在第1状况下,输出警报,在第1状况之后被判定为处于能够操作作业机械的状态时,继续警报的输出。第1状况是被判定为处于无法操作作业机械的状态且检测结果满足规定条件的状况。
技术研发人员:段口将志
受保护的技术使用者:洋马控股株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!