基于多传感器数据融合的无人机跟踪方法
本发明涉及定位,特别涉及一种基于多传感器数据融合的无人机跟踪方法。
背景技术:
1、随着无人机民用化的发展,无人机入侵事件也越来越频繁,无人机跟踪、驱逐的需求也越来越多。现有低空无人机跟踪技术在隐蔽探测、机动目标跟踪、多目标能力等方面存在巨大差距。无人机目标具有体积小、机动灵活、可以靠近遮蔽物飞行等特点,目前已有部分雷达探测系统、光电跟瞄系统、宽带射频信号定位系统实现低空无人机探测、定位,但是这些传感器都是独立工作、依靠人工跟踪识别目标,难以支持后续的无人机诱捕、反制等任务。
技术实现思路
1、本发明的目的在于提供一种基于多传感器数据融合的无人机跟踪方法,以解决单一数据导致跟踪不准确的问题,提高低空无额人机的跟踪精度。
2、为了实现上述发明目的,本发明实施例提供了以下技术方案:
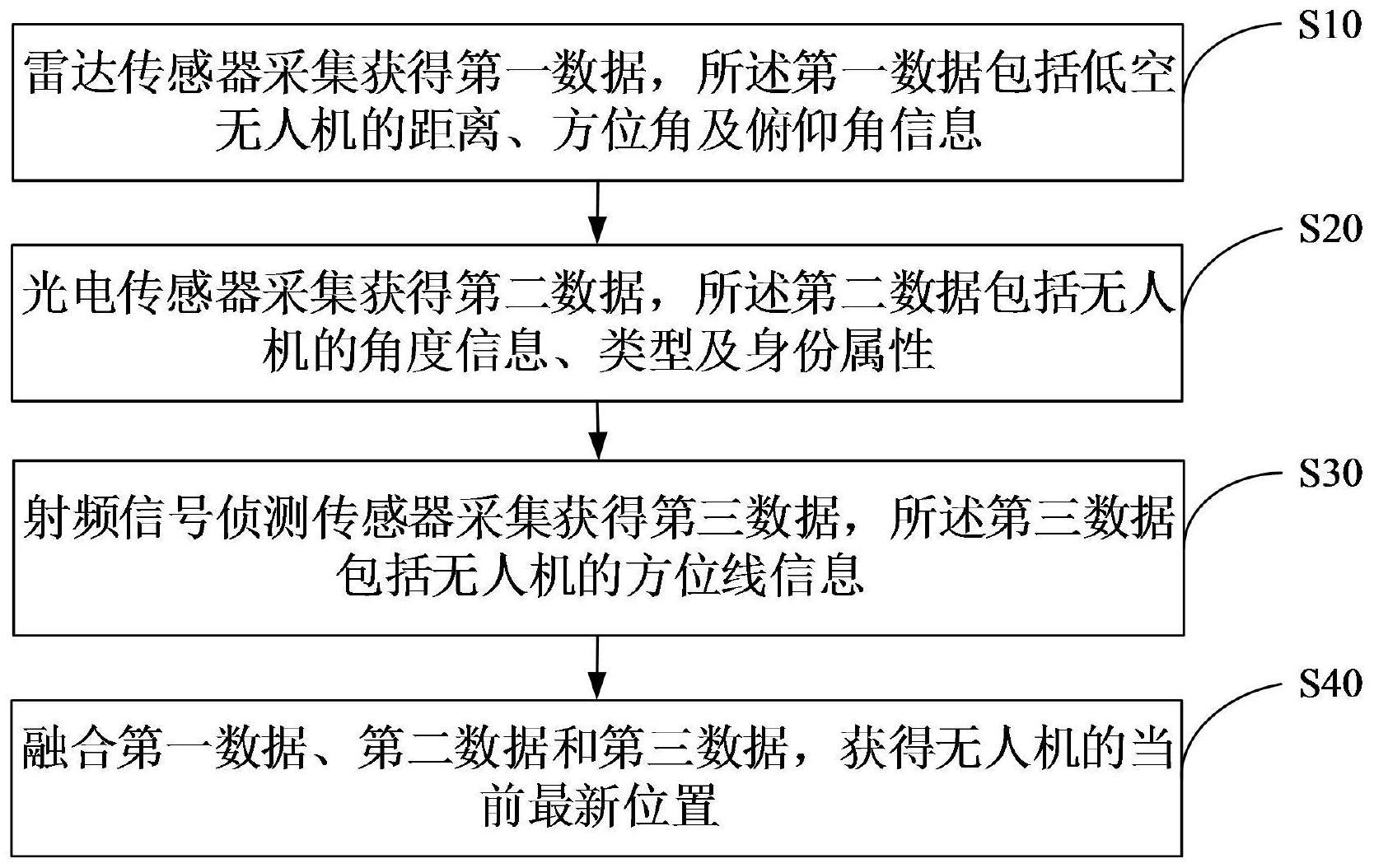
3、一种基于多传感器数据融合的无人机跟踪方法,包括以下步骤:
4、雷达传感器采集获得第一数据,所述第一数据包括低空无人机的距离、方位角及俯仰角信息;
5、红外传感器采集获得第二数据,所述第二数据包括无人机的角度信息及身份属性;
6、射频信号侦测传感器采集获得第三数据,所述第三数据包括无人机的方位线信息;
7、融合第一数据、第二数据和第三数据,获得无人机的当前最新位置。
8、在一种可实施方案中,所述融合第一数据、第二数据和第三数据,获得无人机的当前最新位置的步骤包括:先融合第一数据和第二数据得到融合后的航迹,再将融合后的航迹与第三数据融合,最终得到无人机的当前最新位置。
9、在进一步优化的方案中,采用当前统计模型的滤波跟踪算法对所述当前最新位置在时域进行滤波估计。本方案中,通过对融合后得到的位置在时域(也就是多拍)完成滤波估计,可以使得新计算出来的位置更加平滑。
10、与现有技术相比,本发明同时基于雷达、红外、射频信号三种传感器的数据进行融合,相比于单独采用一种传感器而言,可以提高跟踪位置的准确度,为无人机诱捕与反制提供支持。
技术特征:
1.一种基于多传感器数据融合的无人机跟踪方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于多传感器数据融合的无人机跟踪方法,其特征在于,所述融合第一数据、第二数据和第三数据,获得无人机的当前最新位置的步骤包括:先融合第一数据和第二数据得到融合后的航迹,再将融合后的航迹与第三数据融合,最终得到无人机的当前最新位置。
3.根据权利要求1或2所述的基于多传感器数据融合的无人机跟踪方法,其特征在于,基于长短周期模型进行数据融合。
4.根据权利要求1或2所述的基于多传感器数据融合的无人机跟踪方法,其特征在于,采用当前统计模型的滤波跟踪算法对所述当前最新位置在时域进行滤波估计。
5.根据权利要求4所述的基于多传感器数据融合的无人机跟踪方法,其特征在于,所述当前统计模型的离散时间状态方程为其中,v(k)是离散时间白噪声序列,且α为自相关时间常数,σa2为机动加速度方差,为机动加速度均值,且有
技术总结
本发明涉及一种基于多传感器数据融合的无人机跟踪方法,包括以下步骤:雷达传感器采集获得第一数据,所述第一数据包括低空无人机的距离、方位角及俯仰角信息;红外传感器采集获得第二数据,所述第二数据包括无人机的角度信息及身份属性;射频信号侦测传感器采集获得第三数据,所述第三数据包括无人机的方位线信息;融合第一数据、第二数据和第三数据,获得无人机的当前最新位置。本发明基于多传感器进行数据融合,解决了单一数据导致跟踪不准确的问题,可以提高低空无额人机的跟踪精度。
技术研发人员:刘晶,吴璐攸,冯波
受保护的技术使用者:西华大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!