一种挖掘机群辅助控制系统
本发明涉及土木工程,具体为一种挖掘机群辅助控制系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、挖掘机是常用的土木工程设备,通过驾驶员控制挖掘机在所需的区域执行挖掘作业,作业期间依赖驾驶员的经验和视觉进行控制。实际作业时,经常出现多台挖掘机同时作业的场景,由于每台挖掘机覆盖的作业范围存在差异,加之每台挖掘机依赖驾驶员的经验使得作业面的范围和高程难以精确控制。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种挖掘机群辅助控制系统,通过在施工前设定好每一台挖掘机的作业范围以及作业高程,施工时对挖掘机位置数据进行实时信息采集并分析处理后,获得作业位置信息和高程信息,从而为施工人员以及驾驶人员提供实时挖掘信息,并通过终端展示作业面上每台挖掘机的作业范围和高度,从而对挖掘机群进行辅助控制。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种挖掘机群辅助控制系统,包括:
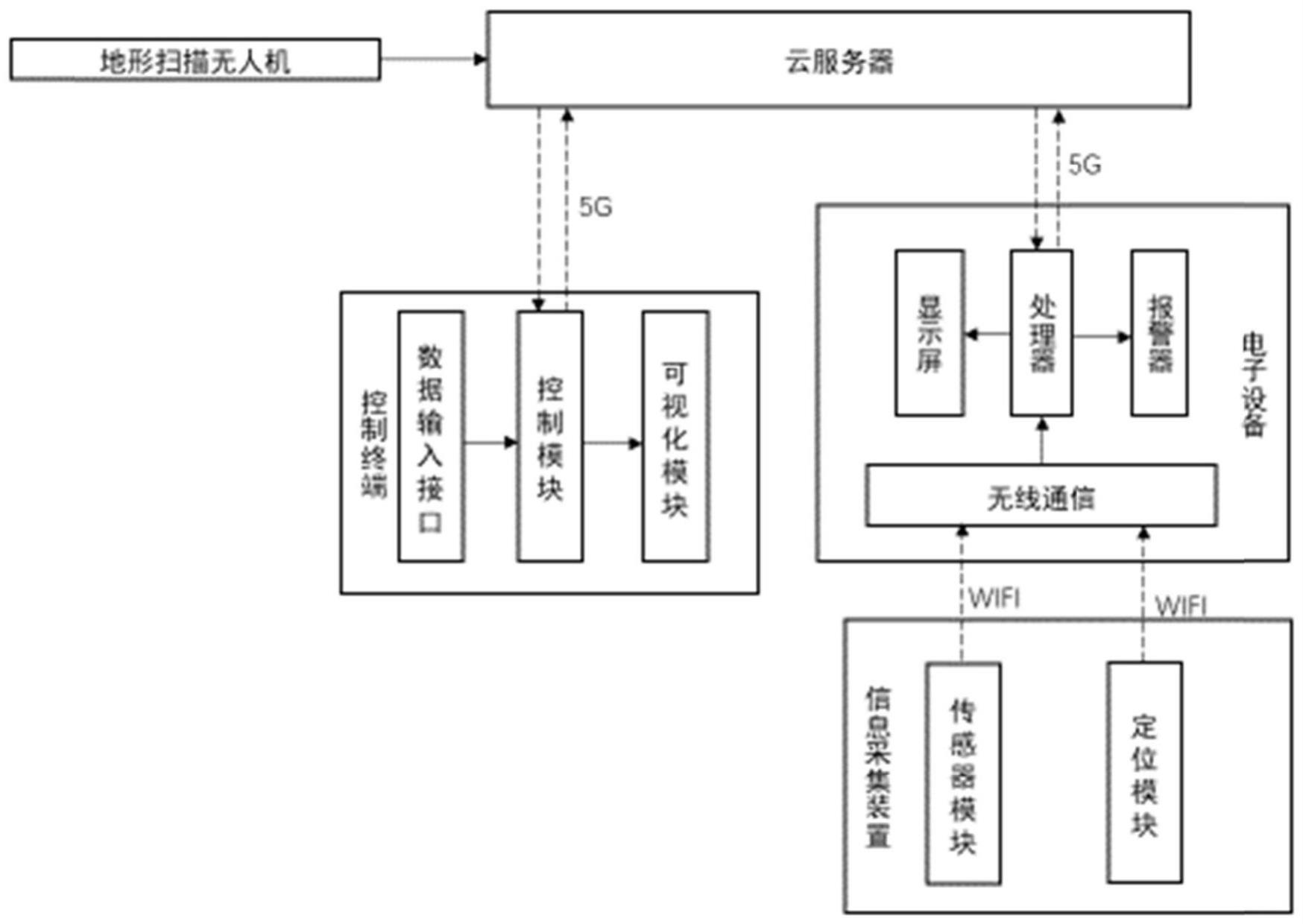
4、信息采集装置,包括定位模块和传感器模块,定位模块获取每一台挖掘机的工作位置发送给电子设备,传感器模块获取每一台挖掘机小臂与垂直面间的倾角和信息采集装置相对于零点位置的高程信息,发送给电子设备;
5、云服务器,根据挖掘机的工作位置判断是否超出作业范围限制;根据信息采集装置所在的位置、挖掘机小臂与垂直面间的倾角、信息采集装置相对于零点位置的高程信息和设定的作业高程,判断每一台挖掘机是否超出高程限制以及挖掘范围限制;将结果发送给控制终端和对应的电子设备;
6、电子设备,接收信息采集装置发来的数据,并发送给云服务器,接收云服务器发来的结果,根据判断结果产生提醒信号并显示;
7、控制终端,接收每一台挖掘机的作业范围信息、作业高程信息和全部判断结果并显示。
8、信息采集装置包括定位模块和传感器模块,定位模块获取挖掘机的工作位置,传感器模块包括布置在挖掘机小臂设定位置处的倾角传感器和高程传感器;倾角传感器获取小臂与垂直面之间的夹角;小臂一端活动连接挖斗,另一端活动连接大臂一端,大臂另一端活动连接挖掘机本体;传感器模块距离挖斗设定距离;传感器模块和定位模块连接在一起,通过高程传感器获取信息采集装置的高程信息。
9、电子设备位于挖掘机驾驶室内,包括分别与处理器连接的显示模块、提醒模块和无线通讯模块;控制终端包括分别与控制模块连接的可视化模块和数据输入接口;信息采集装置与电子设备通讯连接,电子设备和控制终端均与云服务器通讯连接。
10、无人机系统与云服务器通讯连接,将获取到的挖掘作业场地的地形信息输入云服务器;控制终端访问云服务器下载地形信息,展示在可视化模块中,控制模块设定每台挖掘机的作业区域界限信息和作业高程界限信息,并将设定好的界限信息发送给对应挖掘机内的电子设备。
11、根据地形信息获得每一台挖掘机作业区域的相对零点位置h3和地面高程h1,利用信息采集装置的高程传感器和倾角传感器,获得信息采集装置所在的高程h0和挖掘机小臂与垂直面间的倾角θ,设定该挖掘机在该区域的挖掘高程距离相对零点高程的距离为h2,信息采集装置布置在距离挖斗的设定距离a处。
12、得到挖掘机的挖斗距离设定挖掘高程线的距离h,h=h0-h3-h2-ac osθ。
13、得到挖掘机的挖斗距离地面的距离,即为h′=h0-h3-h2-h1-acosθ=h-h1。
14、判断高程是否超出界限,具体为:
15、若h<0,此时挖掘机的挖掘高程超出设定高程。
16、若信息采集装置的实时位置坐标超出其挖掘工作范围,同时h′<0,则此时挖掘机挖掘位置超出设定挖掘工作范围。
17、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
18、1、在施工前设定好每一台挖掘机的作业范围以及高程,施工时对挖掘机的作业数据进行信息采集并处理后,获得挖掘机的位置信息和高程信息,从而为施工人员以及驾驶人员提供实时的作业信息,并且在任意一台挖掘机超出作业范围或超出高程时给出提醒,减少对作业人员现场经验的依赖,使得作业的范围和高程更加精确。
19、2、对于整个挖掘机群,能够统筹规划整个施工场地尤其是大型项目的施工场地的所有挖掘机,无需对每个司机进行对接,告知每个司机的挖掘范围和高程,只需要在控制终端对挖掘机群中的所有挖掘机进行规划,每个司机便可通过驾驶舱中电子设备上的显示屏看到自己的作业范围和作业高程,节约了施工方和挖掘机操作人员的对接时间,更为方便快捷,同时也便于施工方只需在控制终端上便可远程了解到所有挖掘机的作业状况,也可通过控制终端随时对挖掘机群中的任意挖掘机的作业范围和作业高程进行修改。
技术特征:
1.一种挖掘机群辅助控制系统,其特征在于,包括:
2.如权利要求1所述的一种挖掘机群辅助控制系统,其特征在于,所述信息采集装置包括定位模块和传感器模块,定位模块获取挖掘机的工作位置;传感器模块和定位模块连接在一起,通过高程传感器获取信息采集装置的高程信息。
3.如权利要求2所述的一种挖掘机群辅助控制系统,其特征在于,所述传感器模块布置在挖掘机小臂设定位置处,包括倾角传感器和高程传感器,倾角传感器获取小臂与垂直面之间的夹角。
4.如权利要求3所述的一种挖掘机群辅助控制系统,其特征在于,所述小臂一端活动连接挖斗,另一端活动连接大臂一端,大臂另一端活动连接挖掘机本体。
5.如权利要求1所述的一种挖掘机群辅助控制系统,其特征在于,所述电子设备位于挖掘机驾驶室内,包括分别与处理器连接的显示模块、提醒模块和无线通讯模块。
6.如权利要求1所述的一种挖掘机群辅助控制系统,其特征在于,所述控制终端包括分别与控制模块连接的可视化模块和数据输入接口。
7.如权利要求1所述的一种挖掘机群辅助控制系统,其特征在于,所述信息采集装置与电子设备通讯连接,电子设备和控制终端均与云服务器通讯连接。
8.如权利要求6所述的一种挖掘机群辅助控制系统,其特征在于,还具有与云服务器通讯连接的无人机系统,无人机系统将获取到的挖掘作业场地的地形信息输入云服务器;控制终端访问云服务器下载地形信息,展示在可视化模块中,控制模块设定每台挖掘机的作业区域界限信息和作业高程界限信息,并将设定好的界限信息发送给对应挖掘机内的电子设备。
9.如权利要求1所述的一种挖掘机群辅助控制系统,其特征在于,根据地形信息获得每一台挖掘机作业区域的相对零点位置h3和地面高程h1,利用信息采集装置的高程传感器和倾角传感器,获得信息采集装置所在的高程h0和挖掘机小臂与垂直面间的倾角θ,设定该挖掘机在该区域的挖掘高程距离相对零点高程的距离为h2,信息采集装置布置在距离挖斗的设定距离a处;
10.如权利要求9所述的一种挖掘机群辅助控制系统,其特征在于,若信息采集装置的实时位置坐标超出其挖掘工作范围,同时h′<0,则此时挖掘机挖掘位置超出设定挖掘工作范围。
技术总结
本发明涉及一种挖掘机群辅助控制系统,其中的信息采集装置用于采集每一台挖掘机的工作位置、小臂与垂直面的倾角和信息采集装置的位置信息并发送给云服务器;云服务器根据信息采集装置获取的信息判断挖掘机是否超出作业区域界限和高程界限;并将全部判断结果发送给电子设备;电子设备接收云服务器发来的判断结果并根据判断结果产生提醒信号。施工前设定好作业范围及高程,施工时获得搅拌头的位置信息和高程信息,并在超出作业范围或高程时提醒,减少对作业人员现场经验的依赖。
技术研发人员:张炯,侯召,刘佳,邢晓波,张广帅,李伟,李镇,张旭旭,刘振国,刘慧宁,胡德功,飞鹏,李宏伟,李雷波,段晓峰,王昆,王友冕
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!