一种装载机放平系统的控制方法和装载机放平系统与流程
本发明实施例涉及工程机械,尤其涉及一种装载机放平系统的控制方法和装载机放平系统。
背景技术:
1、装载机属于铲土运输机械类,广泛用于公路、铁路、建筑、水电、港口和矿山等工程建设。装载机具有作业速度快、效率高、机动性好、操作轻便等优点,因此成为工程建设中土石方施工的主要机种之一,对于加快工程建设速度,减轻劳动强度,提高工程质量,降低工程成本都发挥着重要的作用,是现代机械化施工中不可缺少的装备之一。
2、目前广泛使用的装载机,多沿用手动操作的方式进行放平,放平效率低,驾驶员劳动强度大。对远程遥控操作的装载机来说,驾驶员主要依靠车载的摄像头获取工作装置视频,并据此进行放平操作。由于视频为二维图像,没有立体感受,驾驶员很难依靠经验进行放平,效率和准确度均不能满足作业要求。行业内,也有基于角度/油缸位移传感器进行自动放平控制的,但其控制方法存在效率低,一般先将铲斗调到放平位置后再调动臂,存在不能同时动作、冲击大的问题。因此,常见的装载机放平控制方法存在效率低、冲击大的问题。
技术实现思路
1、本发明提供一种装载机放平系统的控制方法和装载机放平系统,具有效率高、冲击小的优点,解决现有装载机放平控制方法存在的效率低、冲击大的问题。
2、根据本发明的一方面,提供了一种装载机放平系统的控制方法,应用于遥控装载机,装载机放平系统的控制方法包括:
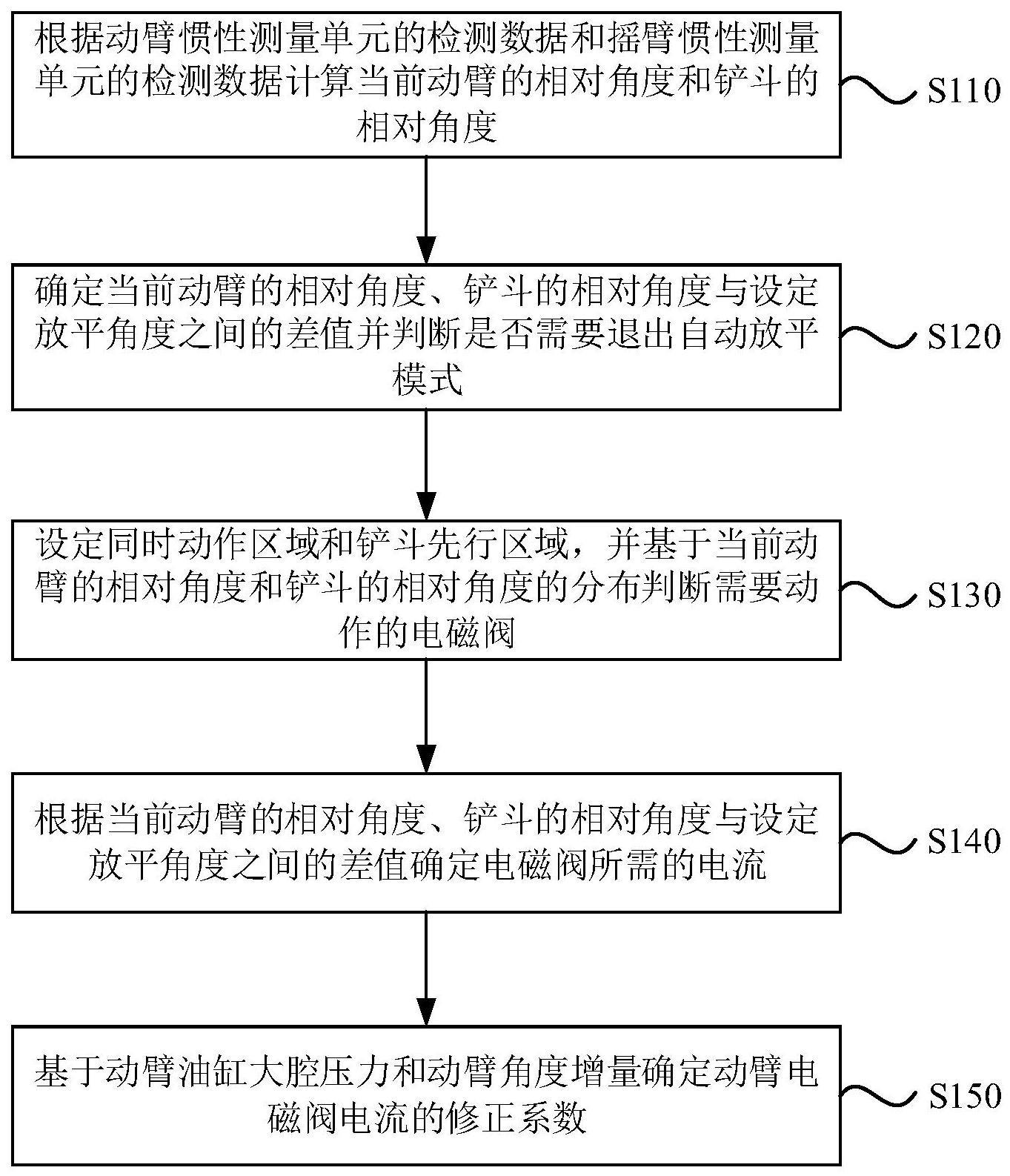
3、根据动臂惯性测量单元的检测数据和摇臂惯性测量单元的检测数据计算当前动臂的相对角度和铲斗的相对角度;
4、确定当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值并判断是否需要退出自动放平模式;
5、设定同时动作区域和铲斗先行区域,并基于当前动臂的相对角度和铲斗的相对角度的分布判断需要动作的电磁阀;
6、根据当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值确定电磁阀所需的电流;
7、基于动臂油缸大腔压力和动臂角度增量确定动臂电磁阀电流的修正系数。
8、可选地,所述根据动臂惯性测量单元的检测数据和摇臂惯性测量单元的检测数据计算当前动臂的相对角度和铲斗的相对角度之前还包括:
9、获取动臂惯性测量单元的检测数据、摇臂惯性测量单元的检测数据以及车架惯性测量单元的检测数据。
10、可选地,所述根据动臂惯性测量单元的检测数据和摇臂惯性测量单元的检测数据计算当前动臂的相对角度和铲斗的相对角度包括:
11、对获取到动臂惯性测量单元的数据进行修正得到动臂相对于车辆竖直方向的相对角度;
12、将获取到摇臂惯性测量单元的数据进行修正得到摇臂相对于车辆竖直方向的相对角度;
13、根据动臂相对于车辆竖直方向的相对角度和摇臂相对于车辆竖直方向的相对角度确定铲斗相对车辆竖直方向的相对角度。
14、可选地,所述确定当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值并判断是否需要退出自动放平模式包括:
15、分别计算当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值,若所述差值均小于预设值,则退出自动放平模式。
16、可选地,所述设定同时动作区域和铲斗先行区域,并基于当前动臂的相对角度和铲斗的相对角度的分布判断需要动作的电磁阀包括:
17、若当前动臂的相对角度和铲斗的相对角度的值位于同时动作区域,则动臂电磁阀和铲斗电磁阀同时开启动作;若当前动臂的相对角度和铲斗的相对角度的值位于铲斗先行区域,则铲斗电磁阀开启动作;若当前动臂的相对角度和铲斗的相对角度的值位于同时动作区域和铲斗先行区域以外,则输出报警。
18、可选地,所述根据当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值确定电磁阀所需的电流包括:
19、基于当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值并通过pid控制算法确定电磁阀所需的电流。
20、可选地,所述基于动臂油缸大腔压力和动臂角度增量确定动臂电磁阀电流的修正系数包括:
21、若动臂油缸大腔压力和动臂角度增量均小于设定值,则动臂电磁阀电流的修正系数为第一修正系数;若动臂油缸大腔压力和动臂角度增量中的任一大于设定值,则动臂电磁阀电流的修正系数为第一修正系数;其中,所述第一修正系数大于所述第二修正系数。
22、可选地,所述基于动臂油缸大腔压力和动臂角度增量确定动臂电磁阀电流的修正系数之后还包括:通过模糊控制或者最优控制对动臂电磁阀电流的修正系数进行优化调整。
23、根据本发明的另一方面,提供了一种装载机放平系统,该装载机放平系统包括:动臂惯性测量单元、摇臂惯性测量单元、车架惯性测量单元、动作手柄、动臂压力传感器、整车控制器、显示屏、集成按键面板、动臂电磁阀、铲斗电磁阀、动臂油缸和铲斗油缸;
24、所述动作手柄安装在驾驶室或远程遥控驾驶舱内,所述动作手柄与所述整车控制器电连接,所述动作手柄用于完成动臂以及铲斗的相关动作;
25、所述动臂压力传感器安装于动臂油缸大腔侧,所述动臂压力传感器与所述整车控制器电连接,所述动臂压力传感器用于实时采集动臂下降过程中动臂油缸的大腔压力;
26、所述动臂惯性测量单元、所述摇臂惯性测量单元和所述车架惯性测量单元分别安装于动臂、摇臂和车架上,且均与所述整车控制器电连接,所述动臂惯性测量单元用于实时检测动臂相对于垂直地平面方向的夹角,所述摇臂惯性测量单元用于实时检测摇臂相对于垂直地平面方向的夹角,所述车架惯性测量单元用于实时检测车架相对于垂直地平面方向的夹角;
27、所述集成按键面板和所述显示屏均安装在驾驶室或远程遥控驾驶舱内,所述集成按键面板和所述显示屏用于装载机放平参数的设定;
28、所述动臂电磁阀连接在所述整车控制器和所述动臂油缸之间,所述动臂电磁阀用于控制所述动臂油缸;
29、所述铲斗电磁阀连接在所述整车控制器和所述铲斗油缸之间,所述铲斗电磁阀用于控制所述铲斗油缸。
30、可选地,所述动作手柄上设置放平按键和结束放平按键,所述放平按键和所述结束放平按键均为触发型按键。
31、本发明实施例的技术方案,提出了一种装载机放平系统的控制方法实现了装载机机具的自动放平,相较于运用角度传感器和油缸位移传感器的方案,可以排除车辆本身倾斜对放平精度的影响。基于动臂、铲斗角度划定同时动作区域,实现动臂和铲斗的同时动作,提高放平效率。基于动臂油缸压力和动臂角度增量,对动臂下降速度进行修正,降低了动臂下降过程的冲击。综上所述,本发明克服了现有装载机放平控制方法存在的效率低、冲击大的问题。
32、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种装载机放平系统的控制方法,应用于遥控装载机,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据动臂惯性测量单元的检测数据和摇臂惯性测量单元的检测数据计算当前动臂的相对角度和铲斗的相对角度之前还包括:
3.根据权利要求1所述的方法,其特征在于,所述根据动臂惯性测量单元的检测数据和摇臂惯性测量单元的检测数据计算当前动臂的相对角度和铲斗的相对角度包括:
4.根据权利要求1所述的方法,其特征在于,所述确定当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值并判断是否需要退出自动放平模式包括:
5.根据权利要求1所述的方法,其特征在于,所述设定同时动作区域和铲斗先行区域,并基于当前动臂的相对角度和铲斗的相对角度的分布判断需要动作的电磁阀包括:
6.根据权利要求1所述的方法,其特征在于,所述根据当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值确定电磁阀所需的电流包括:
7.根据权利要求1所述的方法,其特征在于,所述基于动臂油缸大腔压力和动臂角度增量确定动臂电磁阀电流的修正系数包括:
8.根据权利要求1所述的方法,其特征在于,所述基于动臂油缸大腔压力和动臂角度增量确定动臂电磁阀电流的修正系数之后还包括:通过模糊控制或者最优控制对动臂电磁阀电流的修正系数进行优化调整。
9.一种装载机放平系统,其特征在于,包括:动臂惯性测量单元、摇臂惯性测量单元、车架惯性测量单元、动作手柄、动臂压力传感器、整车控制器、显示屏、集成按键面板、动臂电磁阀、铲斗电磁阀、动臂油缸和铲斗油缸;
10.根据权利要求9所述的装载机放平系统,其特征在于,所述动作手柄上设置放平按键和结束放平按键,所述放平按键和所述结束放平按键均为触发型按键。
技术总结
本发明公开了一种装载机放平系统的控制方法和装载机放平系统。装载机放平系统的控制方法应用于遥控装载机,包括根据动臂惯性测量单元的检测数据和摇臂惯性测量单元的检测数据计算当前动臂的相对角度和铲斗的相对角度;确定当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值并判断是否需要退出自动放平模式;设定同时动作区域和铲斗先行区域,并基于当前动臂的相对角度和铲斗的相对角度的分布判断需要动作的电磁阀;根据当前动臂的相对角度、铲斗的相对角度与设定放平角度之间的差值确定电磁阀所需的电流;基于动臂油缸大腔压力和动臂角度增量确定动臂电磁阀电流的修正系数。本发明装载机放平系统的控制方法具有效率高、冲击小的优点。
技术研发人员:迟峰,张建,刘成全,徐腾飞
受保护的技术使用者:山东临工工程机械有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!