一种自升式平台就位区域海底障碍物扫测打捞方法与流程
本发明属于海上油田自升式平台就位作业,尤其是涉及一种自升式平台就位区域海底障碍物扫测打捞方法。
背景技术:
1、随着油田开发开采力度的加大,大部分油田开发均通过自升式平台完成,自升式平台是推进海上油田开发中最重要的移动式钻井装置。自升式平台在就位作业过程中,在初就位位置点桩,通过抛锚和收放锚牵引自升式平台完成就位。在就位作业过程中,桩靴要入泥0.5米~1米,因此桩靴需一直接触泥面,而就位区域存在一些人为掉落物,比如梯子、短管等刚性物体,这些海底障碍物会对桩靴结构产生损伤,导致桩靴刺漏,甚至对桩腿和升降结构产生影响和破坏,严重影响了就位作业时自升式平台的安全。
2、现阶段,自升式平台在就位作业前未进行扫测和打捞而直接就位,在就位时,遇到插桩困难、滑移处理困难和船体升船困难的情况,影响了就位作业进程。当自升式平台进坞检修时,发现桩靴出现裂纹和刺漏,自升式平台靠桩靴站立在地基基础上,因此,海底障碍物尤其是刚性物体对自升式平台存在很大安全隐患。在未查明就位区域海底情况以及安全的前提下,进行就位作业和插桩作业是一项风险较高的作业。
技术实现思路
1、本发明要解决的问题是提供一种自升式平台就位区域海底障碍物扫测打捞方法,该方法有助于自升式平台在上线、精就位过程中的作业安全,保护自升式平台桩腿、桩靴免受损伤,保障自升式平台设施安全,推进自升式平台就位作业和油田开发进程。
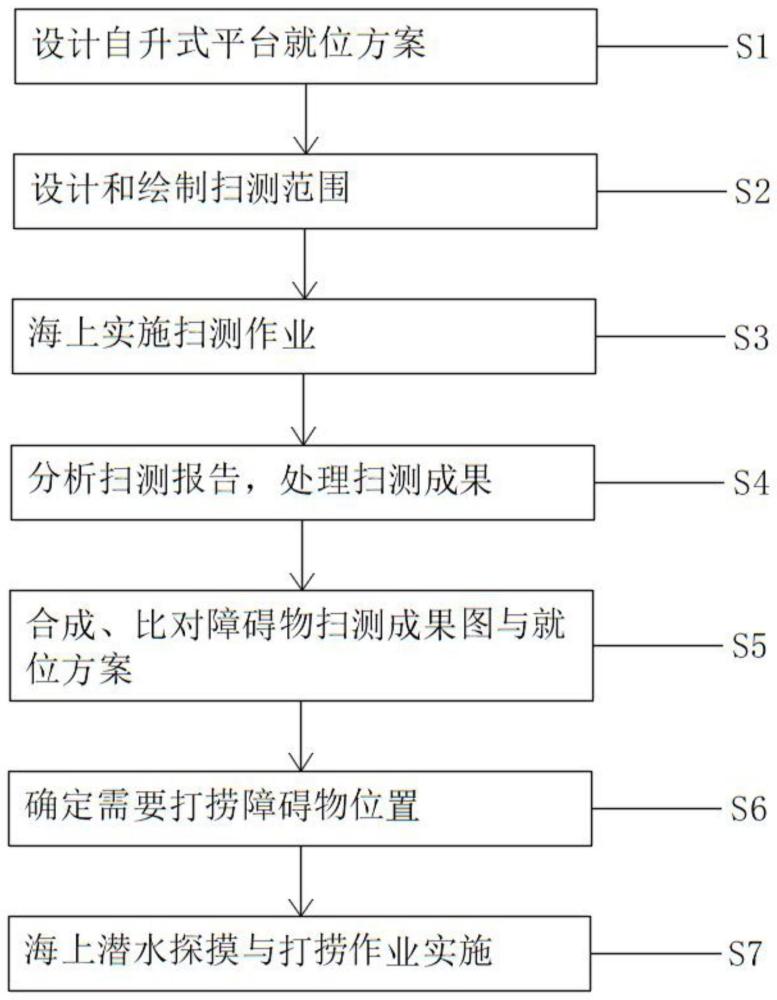
2、本发明提供一种自升式平台就位区域海底障碍物扫测打捞方法,包括以下步骤,
3、s1:设计自升式平台就位方案;
4、s2:设计和绘制扫测范围;
5、s3:海上实施扫测作业;
6、s4:分析扫测报告,处理扫测成果;
7、s5:合成、比对障碍物扫测成果图与就位方案;
8、s6:确定需要打捞障碍物位置;
9、s7:海上潜水探摸与打捞作业实施。
10、进一步的,在所述s1中,所述自升式平台就位方案包括自升式平台、对接的生产平台、管线电缆、老脚印、就位技术要求多种要素,所述自升式平台初就位位置位于所述生产平台前方100米处。
11、进一步的,所述s2包括以下步骤,
12、s21:以所述就位方案中自升式平台船艉所在线段为正方形底边,所述底边中点为船艉中点,以所述船艉中点为中点向左右舷各延伸100米,以所述底边两个端点向船艏方向伸展作为正方形的两条侧边,最后连接两条侧边,形成闭合正方形;
13、s22:船体中心线与正方形边的交点为正方形的中心线;
14、s23:所述闭合正方形的外形尺寸为边长200米×200米;
15、s24:在autocad软件上扫测范围,在就位设计方案图上进行绘制。
16、进一步的,所述s3包括以下步骤,
17、s31:将扫描声纳系统放置在对接生产平台上;
18、s32:通过所述扫描声纳系统扫测海底障碍物,扫测成像内容包括障碍物尺寸和形状;
19、s33:通过水下定位系统和潜水探摸方法确定障碍物位置。
20、进一步的,所述s4包括以下步骤,
21、s41:标记扫测出来的障碍物,标记内容包括障碍物序号编号和坐标值;
22、s42:记录扫测范围内的管线、电缆及管缆压块;
23、s43:记录扫描出的桩坑位置、深度和形态。
24、进一步的,在所述s5中,以就位方案中生产平台某井口或自升式平台船艉中心为合成图的参考点,合成图中显示自升式平台最终就位位置、初就位位置和三个桩靴移位路线辅助线。
25、进一步的,所述s6包括以下步骤,
26、s61:确定自升式平台最终就位位置桩靴处以及桩靴周围10米范围内的障碍物为需打捞障碍物,记录需打捞障碍物序号;
27、s62:自升式平台初就位位置到最终位置桩靴移动路线上的障碍物以及移位路线两侧5米范围内的障碍物为需打捞障碍物,记录需打捞障碍物序号;
28、s63:在autocad软件上直接读出需打捞障碍物到桩靴、移位路线的距离;
29、s64:确定需打捞障碍物位置后发给作业实施方。
30、进一步的,所述s7包括以下步骤,
31、s71:潜水员携带信标下水进行探摸和打捞调查,对调查范围内的海底设施、障碍物、异常物、海底表面异常状态进行定位并打捞障碍物;
32、s72:在探摸目视过程中,对重点部位进行水下拍照和录像;
33、s73:障碍物打捞出水后进行拍照,作为扫测报告部分内容。
34、进一步的,将扫测成果图中的障碍物和参考点植入就位方案中,将就位方案中的自升式平台最终位置与参考点植入扫测成果图中进行验证。
35、进一步的,扫测作业结束后,将地貌情况、障碍物情况、潜水探摸情况和打捞情况汇总形成报告。
36、本发明具有的优点和积极效果是:
37、本发明的自升式平台就位作业区域海底地貌、管缆、障碍物等清晰可见,通过潜水探摸更加明确障碍物性质和位置,清除就位区域海底障碍物,有利于就位作业实施,保障作业设施安全,有助于自升式平台在上线、精就位过程中的作业安全,保护自升式平台桩腿、桩靴免受损伤,保障自升式平台设施安全,推进自升式平台就位作业和油田开发进程。
技术特征:
1.一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:在所述s1中,所述自升式平台就位方案包括自升式平台、对接的生产平台、管线电缆、老脚印、就位技术要求多种要素,所述自升式平台初就位位置位于所述生产平台前方100米处。
3.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:所述s2包括以下步骤,
4.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:所述s3包括以下步骤,
5.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:所述s4包括以下步骤,
6.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:在所述s5中,以就位方案中生产平台某井口或自升式平台船艉中心为合成图的参考点,合成图中显示自升式平台最终就位位置、初就位位置和三个桩靴移位路线辅助线。
7.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:所述s6包括以下步骤,
8.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:所述s7包括以下步骤,
9.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:将扫测成果图中的障碍物和参考点植入就位方案中,将就位方案中的自升式平台最终位置与参考点植入扫测成果图中进行验证。
10.根据权利要求1或2所述的一种自升式平台就位区域海底障碍物扫测打捞方法,其特征在于:扫测作业结束后,将地貌情况、障碍物情况、潜水探摸情况和打捞情况汇总形成报告。
技术总结
本发明提供一种自升式平台就位区域海底障碍物扫测打捞方法,包括以下步骤,S1:设计自升式平台就位方案;S2:设计和绘制扫测范围;S3:海上实施扫测作业;S4:分析扫测报告,处理扫测成果;S5:合成、比对障碍物扫测成果图与就位方案;S6:确定需要打捞障碍物位置;S7:海上潜水探摸与打捞作业实施。本发明的自升式平台就位作业区域海底地貌、管缆、障碍物等清晰可见,通过潜水探摸更加明确障碍物性质和位置,清除就位区域海底障碍物,有利于就位作业实施,保障作业设施安全,有助于自升式平台在上线、精就位过程中的作业安全,保护自升式平台桩腿、桩靴免受损伤,保障自升式平台设施安全,推进自升式平台就位作业和油田开发进程。
技术研发人员:张宝平,李庄威,张甫,岳明,王攀,杨旭才,龚明,王金明,苏会轩
受保护的技术使用者:中海油能源发展股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!