一种用于装载机的智能感知系统及方法与流程
本发明属于工程机械,具体为一种用于装载机的智能感知系统及方法。
背景技术:
1、装载机应用范围广泛,常在港口码头、拌合站、煤矿、钢厂、电厂、焦化厂等地负责对物料进行铲装运卸及堆积码垛等操作。并且由于工作环境恶劣复杂、工作任务繁重劳累、工作节奏突发多变等特点,造成装载机驾驶员工作负荷大、易疲劳,从而难以对装载机周围环境或事件变化进行及时反应,引发安全事故。
2、虽然市场上存在智能辅助装载机、遥控装载机、无人装载机来提升装备的自动化、智能化水平,但是无一例外都是将感知设备固定在车身某处。这种方式往往有以下缺陷:1)因感知设备数量不足,加之装载机体积大且工作装置运动范围大,容易导致存在感知盲区,从而影响作业安全或对铲卸载精准度把控不准;2)增加感知设备虽能一定程序缓解前述问题,但相应增加了整机成本,并且会对机械布置安装与设备维护等方面造成一定困扰。
技术实现思路
1、发明目的:为了克服现有技术中的不足,本发明提供一种用于装载机的智能感知系统及方法,系统由智能感知系统控制单元及前后两个子系统构成,每个子系统都包含了底座、多自由度机械臂、末端的摄像头和激光雷达感知设备,其中底座用于将智能感知系统固定在装载机车身上;多自由度机械臂可通过摆动、旋转使末端的感知设备到达机械臂最大半径范围内的任意位置并保持稳定;摄像头和激光雷达则执行环境感知功能,相比于将摄像头和雷达固定在车上的传统方案,该智能感知系统可自动对当前感知信息的充分度进行评估,若评判可能接下来有感知盲区,则会提前启动机械臂进行移动来尽可能减少感知盲区存在,从而在不过多增加感知设备数量的前提下避免碰撞风险,为装载机行车及作业安全提供保障,通过本发明的系统及方法装载机能够控制感知设备灵活地以不同位姿和从不同角度去探测周围环境与作业情况,从而基于少量的感知设备达到消除感知盲区的目的。
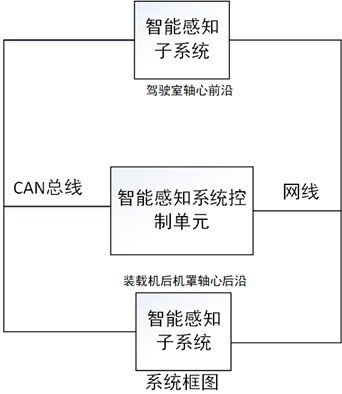
2、技术方案:一种用于装载机的智能感知系统,包括:一个智能感知系统控制单元,以及前后两个子系统1和2;
3、智能感知系统控制单元负责对两个子系统采集到的周围环境信息进行融合处理,并根据装载机控制决策系统的实时决策评估接下来装载机可能会遭遇的感知盲区,然后对子系统1和2进行运动控制;
4、子系统1位于装载机驾驶室顶部轴心前沿,子系统2位于装载机后车体机盖轴心后沿,它们都包含底座、多自由度机械臂、以及机械臂末端的摄像头和激光雷达感知设备,多自由度机械臂通过底座安装在装载机上;
5、子系统1负责前部车体正向、侧向范围的环境感知,子系统2负责后部车体后向、侧向范围的环境感知。
6、进一步的,所述智能感知系统控制单元包含通信模块和运算处理模块;
7、通信模块负责:1)通过网线接收来自两个子系统的摄像头和激光雷达采集到的周围环境信息;2)通过网线或其它高速通信方式接收来自装载机控制决策系统的实时决策信息;3)通过can总线向两个子系统发出相应的运动控制指令;
8、运算处理模块负责:1)对两个子系统的摄像头和激光雷达采集到的周围环境信息进行同步、去噪、比较等感知融合处理,从而使装载机对当前时刻的周围环境有清晰的感知了解;2)根据装载机控制决策系统的实时决策信息明确装载机接下来的动作意图,并结合当前感知的环境信息评估下一时刻装载机处于新位姿时是否会遭遇一定感知盲区;3)如果评估结果为可能遭遇感知盲区,则实时计算需要如何调整机械臂运动参数及姿态才可尽可能消除摄像头和激光雷达的盲区;4)实时根据车辆振动情况采用算法计算减振控制模型。
9、进一步的,所述子系统中底座的下部负责将子系统固定在装载机上,底座内的电机负责带动上部平台进行360°旋转,从而使底座上的多自由度机械臂实现360°旋转;
10、多自由度机械臂中每个机械臂的关节处都能进行在一定弧度范围内绕关节处进行摇摆运动,从而使机械臂末端的摄像头和激光雷达感知设备到达机械臂最大半径范围内的任意位置;
11、激光雷达感知设备包括半固态激光雷达、机械多线激光雷达;
12、多自由度机械臂中最后一节机械臂的末端能进行360°旋转,保证末端的高清摄像头、半固态激光雷达、机械多线激光雷达这三类感知设备有更大更全的角度覆盖;
13、多自由度机械臂与底座连接处、关节处、末端均配有主动减振稳定装置,并且连同机械臂所有电机共同在智能感知系统控制单元的算法指令下保持感知设备端的稳定度。
14、进一步的,所述通信模块包括usb转can装置和网卡;
15、usb转can装置通过usb接口与智能感知系统控制单元连接,负责将控制单元对子系统的控制指令转换为can信号;
16、网卡与摄像头和激光雷达连接,使智能感知系统控制单元可实时获知传感数据;
17、进一步的,所述底座包含can通信单元与智能感知系统控制单元进行通信、电机控制单元、标定参数存储单元;
18、can通信单元负责接收智能感知系统控制单元指令,并向其反馈机械臂运动状态;
19、电机控制单元负责对机械臂的所有电机进行运动控制;
20、标定参数存储单元负责存储构建不同位姿下各个电机的运动参数;
21、一种用于装载机的智能感知方法,包括:
22、当智能感知控制单元结合当前时刻t0周围环境的感知信息、装载机的当前位姿和装载机运动意图信息后,即可预测评估下一时刻t1装载机的新位姿lp1;
23、基于装载机的新位姿lp1,结合智能感知系统当前各个感知设备的位姿s0,即可获知下一时刻各个感知设备的最新位姿s1;
24、基于各个感知设备的新位姿s1,结合各个感知设备的感知方式和视野以及当前时刻的感知信息,即可综合预测下一时刻的感知信息并评估是否在某些区域存在感知盲区;
25、若评估存在感知盲区,则立即驱动机械臂使各个感知设备运动到若干指定区域进行环境观测与扫描,尽可能地消除或减少t1时刻的感知盲区。
26、在进一步的实施例中,用于装载机的智能感知方法的应用场景包括:
27、当装载机在正常行驶时,相比于感知设备固定的传统方式,智能感知系统可驱动机械臂对铲斗近处、动臂附近等处进行无死角观测,消除近处视野盲区;
28、当装载机在关注前后向环境事物的同时,可以驱动机械臂使感知设备周期性地对车身左右两边的区域进行补盲扫描观察,若发现有人或其它物体突然闯入装载机两边的安全范围,则立即采取避障防撞措施;
29、当装载机附近有围墙等障碍物且障碍物高度有限时,可以向上伸展机械臂使感知设备有更高更好的视野,从而能够及早对障碍物后面的情况有所了解,提前做好安全防范;
30、当装载机完成铲掘动作计划收斗时,相比于感知设备固定的传统方式,智能感知系统通过调节感知设备的观测距离与视角能够对铲掘满斗率有更精准的判断;
31、由于装载机卸料时动臂举升会造成感知设备的前向视野易被遮挡,可以驱动机械臂从其它视角对卸料处进行探测感知,评判盛料斗里的物料堆放情况并相应选取最佳卸料点,从而防止物料堆积不均匀或避免因卸载位置不准而造成的洒料问题;
32、当装载机完成卸料计划收斗时,感知设备固定的传统方式很难检测装载机铲斗中是否还有残余物料,智能感知系统可以控制机械臂使感知设备精准观测到铲斗中的物料情况;
33、当无人装载机在隧道等空间比较狭小的场景下作业时,智能感知系统能够根据实际可运动的空间范围实时控制调整机械臂位姿,保证机械臂在安全无碰撞的前提下,最大限度满足探测要求。
34、有益效果:本发明与现有技术相比具有以下优点:
35、感知设备不再固定在装载机车身某处,而是可以根据实际需求灵活运动,能够以更丰富、更有前瞻性、更科学合理的位姿对更大范围内的环境进行感知观测;
36、以尽可能少的感知设备投入实现对感知盲区的消除,避免了因感知设备过多带来的整机成本上升以及机械布置安装与设备维护困难的问题。
- 还没有人留言评论。精彩留言会获得点赞!