一种装载机铲斗控制方法、装置、系统及无人装载机与流程
本发明涉及装载机挖掘,具体涉及一种装载机铲斗控制方法、装置、系统及无人装载机。
背景技术:
1、在装载机的无人作业过程中,铲掘过程的安全性与满斗率直接关系到工程进度与经济效益,如何能在铲掘过程中很好将铲斗控制与底盘控制协同起来,共同完成铲掘作业是一个难点,现存的自动铲掘控制方案大多基于对车速和扭矩的判断进行铲掘,忽略了铲斗实际状态,无法保证物料满斗率,或采用控制铲斗按预设时间交替转动,使铲斗保持震动保证满斗率,但会引起车身整体较大的震动,现存的自动铲掘方案均不涉及铲斗与底盘的协同控制,无法使铲斗与底盘配合运动,在保证满斗率的同时保证安全性。
技术实现思路
1、有鉴于此,本发明提供了一种装载机铲斗控制方法、装置、系统及无人装载机,以解决铲斗与底盘无法配合运动,不能保证满斗率和装载机的安全的问题。
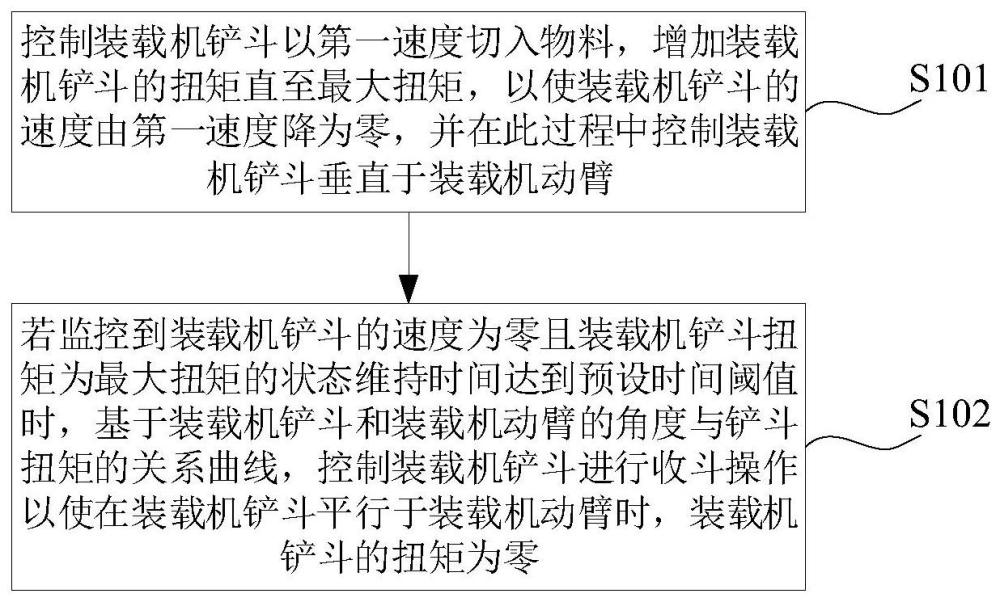
2、第一方面,本发明提供了一种装载机铲斗控制方法,所述方法包括:控制装载机铲斗以第一速度切入物料,增加装载机铲斗的扭矩直至最大扭矩,以使装载机铲斗的速度由第一速度降为零,并在此过程中控制所述装载机铲斗垂直于装载机动臂;若监控到装载机铲斗的速度为零且装载机铲斗扭矩为最大扭矩的状态维持时间达到预设时间阈值时,基于装载机铲斗和装载机动臂的角度与铲斗扭矩的关系曲线,控制装载机铲斗进行收斗操作,以使在装载机铲斗平行于装载机动臂时,装载机铲斗的扭矩为零。
3、本发明提供的装载机铲斗控制方法,在装载机铲斗切入物料时,通过增加装载机铲斗的扭矩直至最大扭矩,装载机铲斗的速度降为零,若装载机铲斗的速度为零且装载机铲斗扭矩为最大扭矩的状态维持一定时间时,再基于装载机铲斗和装载机动臂的角度与铲斗扭矩的关系曲线,控制装载机铲斗进行收斗操作,可防止炉渣检测不准确导致铲斗未插入物料导致挖掘失败或铲斗插入物料较浅位置,导致无法满斗的情况,且根据铲斗的实际角度,动态分配底盘的扭矩,保证铲掘过程中的满斗率,在铲斗收斗过程中,当装载机铲斗平行于装载机动臂时,控制装载机铲斗的扭矩为零,保证收斗后底盘不再施加力矩,保证收斗完成后车辆的安全性。
4、在一种可选的实施方式中,所述装载机铲斗和装载机动臂的角度与铲斗扭矩的关系曲线通过下述步骤得到:选取装载机铲斗在收斗过程中装载机铲斗与动臂之间形成的任意两个角度所对应的装载机铲斗的扭矩作为动态调整点,其中,选取的角度大于0°且小于90°;基于装载机铲斗垂直于动臂时的最大扭矩、装载机平行于动臂时的零扭矩以及两个动态调整点调节三阶贝塞尔曲线的变化趋势,获得装载机铲斗与装载机动臂的角度与铲斗扭矩的关系曲线。
5、本发明通过选取装载机铲斗与动臂之间形成的任意两个角度对应的装载机铲斗的扭矩作为动态调整点,并基于装载机铲斗垂直于动臂时的最大扭矩、装载机平行于动臂时的零扭矩的两个端点调节三阶贝塞尔曲线的变化趋势,三阶贝塞尔曲线可基于四个控制点绘制更加精确的平滑曲线,从而得到更加精准的装载机铲斗与装载机动臂的角度与铲斗扭矩的关系曲线,继而保证铲斗工作的安全性和铲掘过程中的平顺性。
6、在一种可选的实施方式中,所述基于装载机铲斗和装载机动臂的角度与铲斗扭矩的关系曲线,控制装载机铲斗进行收斗操作,包括:从装载机铲斗与装载机动臂的角度与铲斗扭矩的关系曲线上提取一系列贝塞尔曲线点,构成贝塞尔曲线点集合;获取装载机铲斗与装载机动臂的当前角度,判断所述当前角度是否与所述贝塞尔曲线点集合中的任一贝塞尔曲线点一致;若当前角度与所述贝塞尔曲线点集合中的某一贝塞尔曲线点一致,则基于与所述当前角度一致的贝塞尔曲线点所对应的第一扭矩控制装载机铲斗进行收斗操作;若当前角度与所述贝塞尔曲线点集合中的所有贝塞尔曲线点均不一致,则选取贝塞尔曲线点集合中与当前角度相邻最近的两个点所对应的扭矩,并进行线性插值处理,得到当前角度对应的第二扭矩,并基于所述第二扭矩控制装载机铲斗进行收斗操作。
7、本发明的三阶贝塞尔曲线通过一系列的离散贝塞尔曲线点进行实际应用,在基于关系曲线提取一系列贝塞尔曲线点后,可在铲斗收斗过程中获取装载机铲斗与动臂的当前角度,若当前角度与所有贝塞尔曲线点均不一致,则选取贝塞尔曲线点集合中与当前角度相邻最近的两个点所对应的扭矩,并进行线性插值处理,得到当前角度对应的第二扭矩,防止实际角度值无法与一系列的贝塞尔曲线点对应,导致控制铲斗的扭矩有误差,无法保证装载机的安全性和满斗率。
8、在一种可选的实施方式中,所述方法还包括:基于物料位置点设置一个安全点;在装载机铲斗收斗过程中,若监测到装载机铲斗的当前位置超过安全点位置时,或监控到装载机铲斗平行于装载机动臂时,控制装载机铲斗的扭矩为零。
9、本发明通过在物料位置处设置安全点,监测到铲斗当前位置超过安全点位置时,控制铲斗的扭矩为零,防止物料位置点和安全点之间实际无物料,但被装载机误检测为有物料,在无任何阻力的情况下,装载机施加较大的力矩会引发安全问题。
10、在一种可选的实施方式中,所述方法还包括:监测装载机的侧倾角和俯仰角,当所述装载机的侧倾角大于预设的侧倾角阈值时,和/或所述装载机的俯仰角大于预设的俯仰角阈值时,控制装载机进行制动操作。
11、本发明通过实时监测装载机的侧倾角和俯仰角,与对应的阈值进行比较,在大于阈值后,则控制装载机紧急制动,保证装载机的安全。
12、在一种可选的实施方式中,在控制装载机铲斗以第一速度切入物料之前,所述方法还包括:设定装载机开始工作点,获取装载机开始工作点和物料位置点间的距离,所述装载机在开始工作点时的速度为零;基于所述第一速度以及所述装载机开始工作点和物料位置点间的距离,计算装载机行驶的加速度;基于所述加速度控制装载机行驶,并在装载机行驶过程中控制铲斗贴地。
13、本发明通过设置开始工作点,基于第一速度和开始工作点和物料位置点获取加速度,并控制装载机行驶,保证装载机在物料位置处有一定的速度,可保证较高的满斗率,且在装载机行驶过程中控制铲斗贴地,实现了将行驶路段上的残留物料推至物料堆,并在物料处进行挖掘收斗。
14、在一种可选的实施方式中,所述方法还包括:在装载机由停车点采用循迹模式循迹行驶至开始工作点时,将装载机的控制模式由循迹模式切换为作业模式。
15、第二方面,本发明提供了一种装载机铲斗控制装置,所述装置包括:
16、铲斗控制模块,用于控制装载机铲斗以第一速度切入物料,增加装载机铲斗的扭矩直至最大扭矩,以使装载机铲斗的速度由第一速度降为零,并在此过程中控制所述装载机铲斗垂直于装载机动臂;
17、铲斗收斗模块,用于若监控到装载机铲斗的速度为零且装载机铲斗扭矩为最大扭矩的状态维持时间达到预设时间阈值时,基于装载机铲斗和装载机动臂的角度与铲斗扭矩的关系曲线,控制装载机铲斗进行收斗操作,以使在装载机铲斗平行于装载机动臂时,装载机铲斗的扭矩为零。
18、第三方面,本发明提供了一种装载机铲斗控制系统,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的装载机铲斗控制方法。
19、第四方面,本发明提供了一种无人装载机,包括上述第三方面的装载机铲斗控制系统。
- 还没有人留言评论。精彩留言会获得点赞!