一种降低高边坡支护作业风险的机械施工方法与流程
本发明涉及边坡支护施工,更具体地说,本发明涉及一种降低高边坡支护作业风险的机械施工方法。
背景技术:
1、水电站边坡支护作业机械施工主要用于边坡开挖和支护,可以有效地保证施工的安全和项目的顺利进行。这种机械能够增加边坡的稳定性,减少边坡滑坡和倒塌的风险,确保施工过程中人员和设备的安全。
2、现有已经公开的技术中,中国专利公开号cn114059557a的专利公开了一种深厚覆盖层水电站厂房基坑直立边坡开挖支护方法,针对施工期较长,常规方式一般采取放坡开挖,给主机间施工提供工作面。待主机间四周墙体施工完成并回填后。方可开始安装间、副厂房,延长了施工工期,机组安装调试滞后,成为影响工期的主要因;则通过采用缓坡比放坡开挖厂房基坑相比,缩短厂房施工工期和节省投资,并可提前实现安装间功能,尽早开展机电设备安装工作,开挖支护方法可广泛用于深厚覆盖层水电站厂房基坑施工;但是该施工方法还存在如下缺陷;
3、上述水电站边坡支护作业过程中,有大量的施工人员进出以及人工搭设架子支护施工,极易导致侧边滑落的石头下降,施工风险较高,安全性较差,因此施工事故率有效提高,而且效率较低,为此需要提供一种降低高边坡支护作业风险的机械施工方法。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种降低高边坡支护作业风险的机械施工方法。
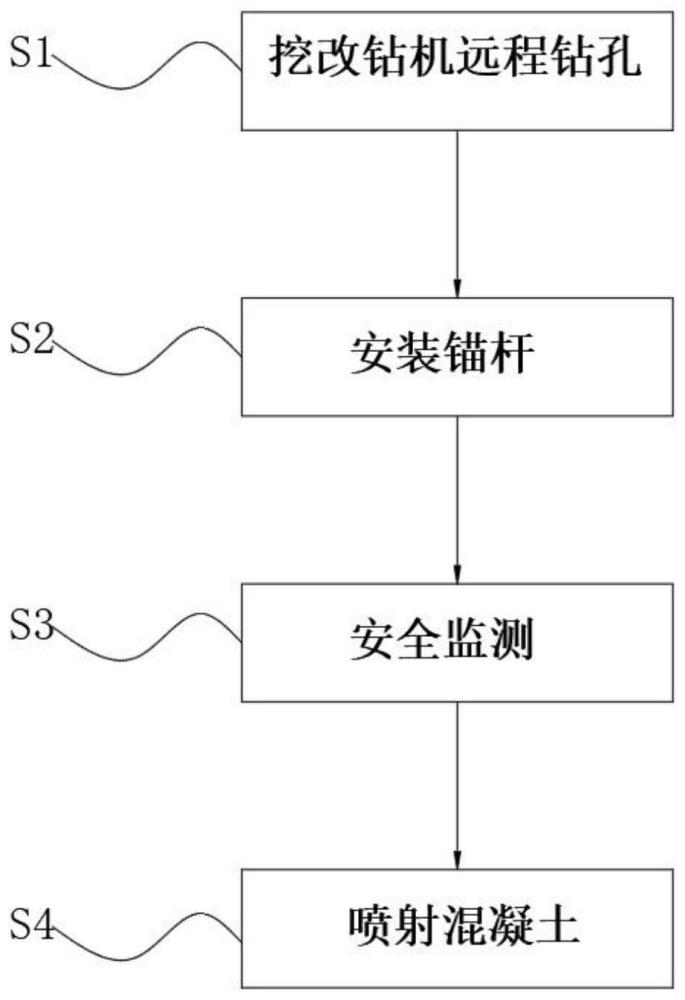
2、为实现上述目的,本发明提供如下技术方案:一种降低高边坡支护作业风险的机械施工方法,包括具体步骤如下:
3、s1、挖改钻机远程钻孔,在低坡位置处通过无线网移动挖改钻机,钻头接触高边坡侧面,钻孔深度和直径需根据设计要求确定实现钻挖;
4、s2、安装锚杆,利用远程操控锚杆安装机将锚杆插入到钻孔中,填充混凝土浇筑固定;
5、s3、安全监测,在锚杆的外露部分利用吊机安装支撑模板,以固定锚杆的位置,通过无人机俯视监控机械施工区域;
6、s4、喷射混凝土,使用喷射机将混凝土喷射到边坡表面,形成一层保护层,并通过悬挂检测承重力,无裂痕即可。
7、优选地,所述s1中挖改钻机调整好钻头的位置和角度,角度保持在50-90°范围,钻头选取1—1.2m,在钻孔过程中,需要时刻观察钻头的运行情况是否产生断头问题,以及钻孔深度为0.5—0.6m,并调整钻头位置为120-150°以及转速切换为600-800r/min,所述s1中采取测试信号强度或者咨询网络提供商方式来确定覆盖范围,在挖改钻机上安装无线网卡,并连接到可用的无线网,根据无线网提供商的要求,配置挖改钻机的网络连接,获取ip地址、网关、dns网络参数,并将其配置到挖改钻机的网络设置中,在配置好网络连接后,可以移动挖改钻机到低坡位置处,移动距离边坡需要达到2—5m,所述s1中钻孔深度通过超声波探测仪发射超声波进入洞口,每50s检测一次,对获取的钻孔深度和直径数据计算平均值、最大值、最小值,选取平均值,根据测量结果,对钻孔的过程进行调整和优化,按照指定深度钻孔,检测到的所有数据通过无线网远程输送到操作人员操作平台上。
8、优选地,所述s2中通过无线网连接方式,将锚杆安装机与远程控制终端操控平台连接起来,在远程控制终端上操作锚杆安装机,将锚杆插入到钻孔中,在锚杆插入钻孔后,使用锚杆安装机的调整和固定装置,将锚杆调整到所需的位置,并使用固定装置将锚杆固定在钻孔中填充砂浆,在锚杆安装完成后,对安装情况拍照5—10张图片,拍照后通过上传数据库,与数据库在5—10s内比对锚杆位置,确定各个锚杆位置与图纸位置相同,所述s2中填充混凝土采用混凝土浇筑车,通过浇筑管道对接至将锚杆插入孔边缘空隙中,使用振捣器接触锚杆振捣5—10min,等待5—6h后在混凝土初凝,通过高压水枪以2-5mpa压力进行养护,检查开裂状况。
9、优选地,所述s3中吊装过程中模板通过吊机夹持爪夹持固定,通过由下到上依次移动5—10m后通过,摄像头采集图像确定模板安装位置后,放置在锚杆上,喷射混凝土覆盖5-10层后利用吊机爪切换抹平板贴合在混凝土上,从右到左依次涂抹混凝土,并且压平混凝土5—10次,所述s3中无人机监测时将无人机和摄像头安装在施工区域周边合适的位置,确保覆盖需要监控的区域根据实际需要选择位于吊机上方位置处,飞行高度为50—80m,拍摄角度向下倾斜45-60°,通过遥控器或自动控制程序操纵无人机进行拍摄,同时,可以通过无人机搭载的摄像头实时传输画面到指挥中心或监控设备上,通过图像识别技术将起吊区域分为危险区和安全区,人员进入危险区则立刻报警提示,在5—10s内关闭吊机运行。
10、优选地,所述s4中拉拔试验时,将液压千斤顶放在托板和螺母之间,拧紧螺母,施加一定的预应力,然后用手动液压泵加压5-6mpa,同时记录液压表和位移计上的对应读数,停止加压,测试后可整理出锚杆的荷载位移曲线,所述位移计数量设置为3—5台,并且多个位移计从左到右依次等距排列设置,相邻两台位移计之间的距离为100—150cm。
11、本发明的技术效果和优点:
12、1、本发明在锚杆的外露部分利用吊机安装支撑模板,摄像头采集图像确定模板安装位置后,放置在锚杆上,喷射混凝土覆盖后利用吊机爪切换抹平板贴合在混凝土上,固定锚杆的位置,通过无人机俯视监控机械施工区域,无人机监测时将无人机和摄像头安装在施工区域周边合适的位置,确保覆盖需要监控的区域根据实际需要选择位于吊机上方位置处,通过图像识别技术将起吊区域分为危险区和安全区,人员进入危险区则立刻报警提示,能够对施工区域实现远程机械施工操作,同时对施工区域实现实时监测,避免施工人员闯入正在作业的机械设备危险区域范围,降低高边坡支护作业风险,提高施工安全性;
13、2、本发明采用喷射机将混凝土喷射到边坡表面,形成一层保护层,并通过悬挂检测承重力,将液压千斤顶放在托板和螺母之间,拧紧螺母,施加一定的预应力,然后用手动液压泵加压到指定压力,同时记录液压表和位移计上的对应读数,停止加压,测试后可整理出锚杆的荷载位移曲线,能够对施工后的整个混凝土喷射实现测试操作,避免出现开裂脱落问题,提高施工安全性;
14、3、本发明采用钻孔深度实现远程获取后,对获取的钻孔深度和直径数据计算平均值、最大值、最小值,选取平均值,根据测量结果,对钻孔的过程进行调整和优化,检测到的所有数据通过无线网远程输送到操作人员操作平台上,在远程控制终端上操作锚杆安装机,将锚杆插入到钻孔中,在锚杆插入钻孔后,使用锚杆安装机的调整和固定装置,能够实现远程机械设备检测施工操作,提高边坡支护作业安全性;
15、通过上述多个作用的相互影响,首先通过图像识别技术将起吊区域分为危险区和安全区,再通过检测到的所有数据通过无线网远程输送到操作人员操作平台上,在远程控制终端上操作锚杆安装机,最后通过记录液压表和位移计上的对应读数,停止加压,测试后可整理出锚杆的荷载位移曲线,综上能够确保施工时远程无线测量以及控制机械施工,并且远程实时监控各个机械的施工危险区,避免人员进入机械施工作业危险区,提高作业安全性。
- 还没有人留言评论。精彩留言会获得点赞!