一种基坑自动监测控制系统及方法与流程
本发明涉及建筑施工领域,尤其涉及一种基坑自动监测控制系统及方法。
背景技术:
1、目前,随着城市建设的发展,各类建筑对于地下空间的需求增大,因此开挖深度大、开挖面积大的深大基坑工程日益增多。复杂的水文地质条件、土体开挖后应力变化、周边既有建筑对土体的附加压力以及施工措施等内外部因素,均会对基坑工程和既有建筑的变形产生影响。一旦土体产生较大的变形甚至失稳,则会造成严重的生命财产损失,带来恶劣的社会影响。因此,为保证深基坑施工安全,对其进行全面的监测是必不可少的措施。
2、现行基坑工程监测标准中,必要和比较常见的监测内容有地下水位、围护墙(边坡)顶部水平和竖向位移,周边建筑和管线的竖向位移、周边建筑和地表的裂缝、土体深层水平位移以及支撑结构和锚杆的轴力等。以上基坑监测工作主要依赖人工完成,深基坑工程监测量大,人工监测无法实时监测反馈基坑各项数据,难以及时发现施工过程中存在的问题和风险。
3、土方开挖作为基坑工程中工程量大的工作,开挖土方的测算能够帮助施工技术人员了解当前工况的开挖进度,合理安排施工资源,但是目前关于基坑土方开挖量的测算以及开挖进度测算的技术较少,也缺少土方开挖对支撑轴力影响分析的方法。
4、相较于人工监测,自动化监测具有实时监测、精度高、自动化数据处理及预警和大范围监测等优势,自动化基坑工程监测是未来发展的必然趋势。但是现阶段的自动化监测工作仅以预警为主,无法对一些预警内容进行初步干预,及时降低风险,自动化的优势无法完全发挥。
技术实现思路
1、本发明提供一种基坑自动监测控制系统及方法,以解决上述技术问题。
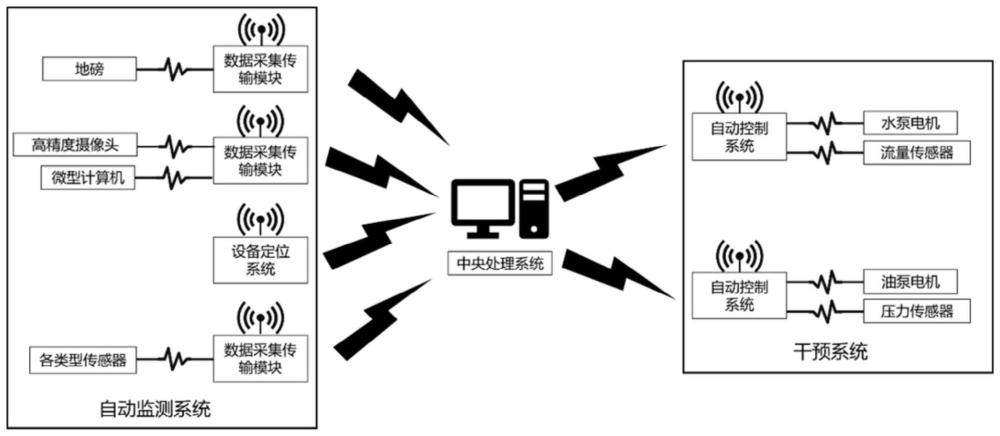
2、为解决上述技术问题,本发明提供一种基坑自动监测控制系统,包括自动化监测系统、中央处理系统以及干预系统,
3、所述自动化监测系统包括设备定位系统、称重系统以及视觉识别系统,所述设备定位系统用于获取施工设备的位置信息;所述称重系统用于获取进出场车辆的重量;所述视觉识别系统用于识别进出场车辆的车牌号码;
4、所述中央处理系统用于建立基坑三维模型,接收所述自动化监测系统的监测数据,并基于监测数据控制所述基坑三维模型中对应位置处的所述干预系统工作;
5、所述干预系统至少包括降水系统和支撑轴力伺服控制系统,所述降水系统用于调节水泵电机的排水速度;所述支撑轴力伺服控制系统用于调节油泵电机的支撑轴力。
6、较佳地,所述设备定位系统包括定位导航系统和红绿信号灯,所述定位导航系统用于获取和传输所述施工设备的位置信息,所述红绿信号灯用于显示对应的施工设备的状态;所述称重系统包括地磅;所述视觉识别系统包括摄像头。
7、较佳地,所述自动化监测系统预留有多个手动接口。
8、较佳地,所述自动化监测系统监测的监测数据显示于所述基坑三维模型中。
9、本发明还提供了一种如上所述的基坑自动监测控制系统的控制方法,包括如下步骤:
10、步骤1:在所述中央处理系统上建立基坑三维模型,按照地勘报告对所述基坑三维模型的土层进行划分,并输入各土层的物理性质,标记监测点位置;
11、步骤2:按照预定施工方案对所述基坑三维模型划分施工区域,并输入各施工区域对应的开挖时间以及施工设备安排,设定各项监测数据的警戒值、警报值;
12、步骤3:在基坑相应位置处安装所述自动监测系统和干预系统;
13、步骤4:所述中央处理系统发出指令,所述自动监测系统开始首次监测工作,并使用人工监测对获取的监测数据进行标定;
14、步骤5:所述中央处理系统对所述干预系统发出调节指令,测试所述干预系统是否能正常工作;
15、步骤6:对所述设备定位系统进行校准,并将各施工区域与施工设备和进出场车辆进行绑定,用于后续计算土方开挖进度和分析支撑轴力状态;
16、步骤7:所述自动化监测系统开始工作,按照设定的采样频率实时采集监测数据;
17、步骤8:将监测数据实时回传至所述中央处理系统储存,并按照监测点位置将各监测数据显示给技术人员;
18、步骤9:在监测数据出现异常后,所述中央处理系统发出警报,同时增加所述自动化监测系统的采样频率;
19、步骤10:所述中央处理系统根据异常情况判断是否需要采取干预措施,并将对应的干预措施发送给所述干预系统;
20、步骤11:技术人员根据现场情况对警报进行处理,监测数据反馈无异常后解除警报,系统恢复正常模式继续监测;
21、步骤12:根据项目需求,完成基坑在不同阶段的监测。
22、较佳地,计算土方开挖进度的方法包括:
23、根据地勘报告的土层密度信息以及基坑三维模型中施工区域划分得到本次开挖总重量;
24、再基于各施工区域与施工设备和进出场车辆的绑定关系,通过称重和识别车牌将外运的土方重量归类到各施工设备的开挖重量信息统计;
25、通过统计区域内施工设备的累计开挖重量,与开挖总重量对比,获得当前开挖进度;根据工作时长以及开挖重量计算得到开挖速率;根据开挖速率以及剩余开挖重量计算得到预计施工剩余时间。
26、较佳地,分析支撑轴力状态的方法包括:
27、通过所述中央处理系统中的工况设置以及自动监测系统的设备定位系统的位置信息的判断异常区域一段时间内是否存在施工作业;
28、再根据所述基坑三维模型中已设置的土层的物理性质、设备定位系统的位置信息得到平均开挖高度,计算主动土压力;用主动土压力乘以安全系数后,得到当前施工作业对支撑产生的最大水平荷载,判断轴力监测异常是否由开挖作业引起,并且是否在安全范围内。
29、较佳地,当判断支撑轴力发生异常且需要调整时,首先读取需要调整的支撑的数量以及当前支撑的轴力值,若仅有一根支撑需要调整,则按照设定的变化速率进行调整;若存在多根支撑的轴力需要进行调整,则计算轴力值与设定值之差的绝对值与设定值的比值,按照比值从大到小的顺序对各支撑的轴力进行调整。
30、较佳地,步骤9中,所述中央处理系统发出警报的方法包括:
31、所述中央处理系统将实时监测值与所述警戒值、报警值对比,判断基坑对应位置是否处于正常状态,若否,则基坑对应位置处于警报状态;
32、根据不同的监测数据异常组合判断所述警报状态的类别。
33、较佳地,所述警报状态的类别按照紧急程度分为:普通警报、黄色警报和红色警报。
34、与现有技术相比,本发明提供的基坑自动监测控制系统及方法具有如下优点:
35、1、本发明通过接入和兼容各类传感器实现基坑的自动化监测,能够远程实时查看基坑各项监测数据,避免监测数据存在滞后性的同时,减少人工测量工作;
36、2、本发明通过加入设备定位系统,能够实时显示坑内施工设备的位置以及运转情况,辅助识别当前基坑施工状态;
37、3、通过获取施工设备的位置信息(高度),以及外运的土方重量,再根据工况划分情况计算土方总开挖重量,从而判断当前的土方开挖进度;
38、4、本发明通过将干预系统和自动监测系统连接起来,可以在监测数据超过预警值时,结合各项监测数据自动分析研判,做出初步的干预措施,避免危险进一步发展,保障施工人员和项目安全。
- 还没有人留言评论。精彩留言会获得点赞!