一种海上风电导管架施工测量系统的制作方法
本技术涉及海上风电工程,具体涉及一种海上风电导管架施工测量系统。
背景技术:
1、导管架是海上风电场平台的重要基础,海上风电场建设需要将导管架固定设置在特定位置。在相应的施工过程中,需要对导管架进行精准定位测量。随着国内海上风电的快速发展,海上风场选址离岸距离越来越远,水深越来越深,个别施工项目区域的水深在50米左右。现有的测量定位技术很难满足海上风电场导管架施工的精度需求,深水区中难以实现精准测量定位,施工难度增加,施工效率大大降低。
技术实现思路
1、有鉴于此,本说明书实施例提供了一种海上风电导管架施工测量系统,能够在施工过程中实现精准定位测量,保证施工精确性,提高施工效率。
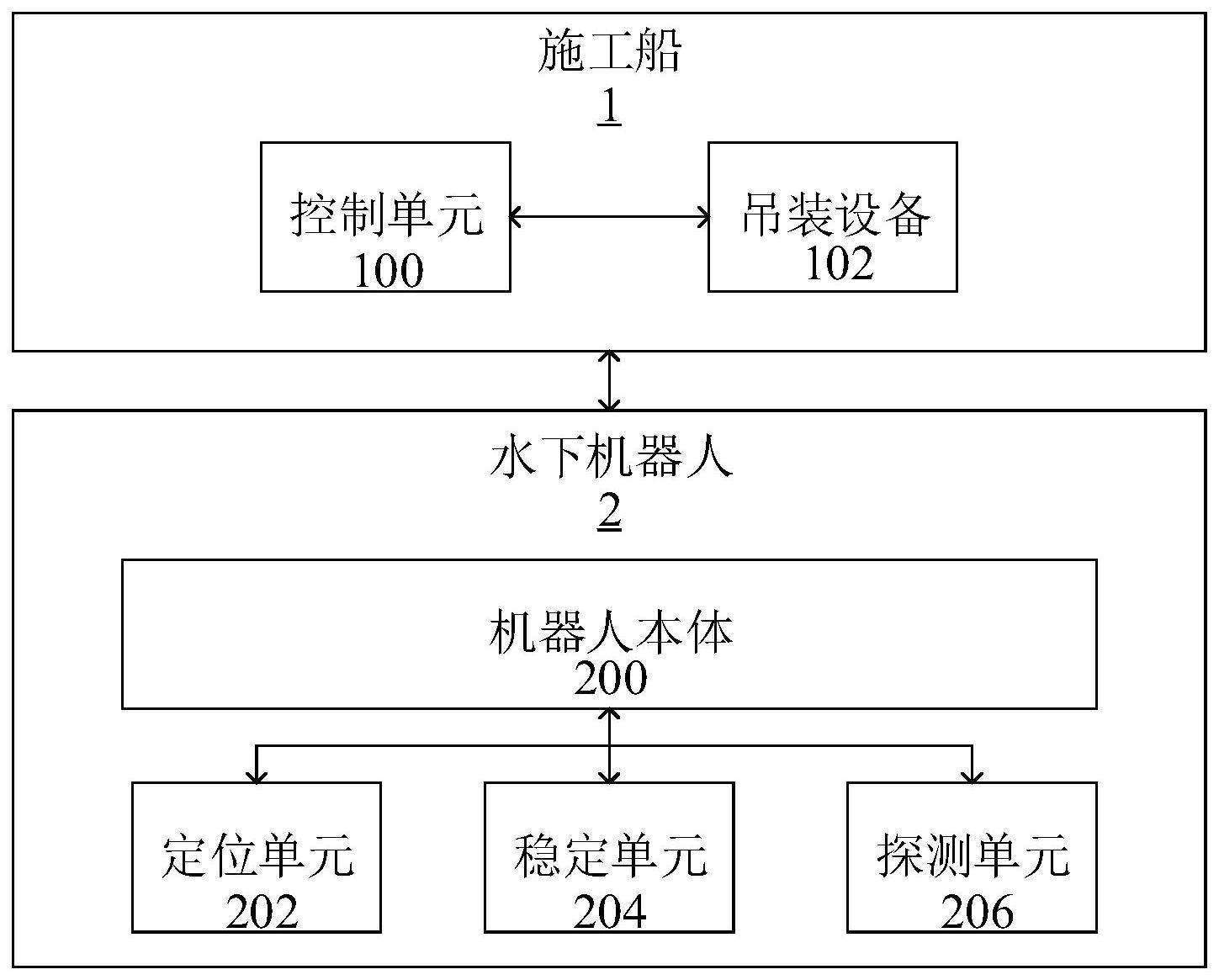
2、本说明书实施例提供了一种海上风电导管架设施工测量系统,所述系统包括施工船与水下机器人,所述施工船与所述水下机器人通过传输线缆连接;
3、所述施工船包括控制单元与吊装设备;
4、其中,所述控制单元用于控制所述水下机器人行驶至目标施工区域,以及用于控制所述吊装设备调整导管架的位置及姿态;
5、所述水下机器人包括机器人本体以及装载在所述机器人本体上的定位单元、稳定单元与探测单元;
6、其中,所述定位单元,用于获取所述水下机器人的实时位置信息;
7、所述稳定单元,用于在所述水下机器人行驶至所述目标施工区域后实时修正所述机器人本体的水下姿态,使所述机器人本体保持姿态稳定;
8、所述探测单元设置在所述机器人本体下部,用于在所述目标施工区域中探测识别出预设的固定桩,所述固定桩用于与所述导管架对接。
9、可选的,所述定位单元还用于将所述实时位置信息发送给所述控制单元;
10、所述控制单元,还用于根据所述实时位置信息为所述水下机器人生成指向所述目标施工区域的导航路径,并基于所述导航路径控制所述水下机器人行驶。
11、可选的,所述定位单元为超短基线定位装置。
12、可选的,所述稳定单元包括姿态感知模块与姿态调整模块;
13、所述姿态感知模块,用于感知确定所述水下机器人的实时姿态;
14、所述姿态调整模块,用于在所述实时姿态相对预设稳定姿态发生偏转时对所述水下机器人进行姿态修正。
15、可选的,所述姿态感知模块为高精度多轴光纤姿态仪。
16、可选的,所述探测单元包括扫描探测模块与识别模块;
17、所述扫描探测模块,用于对所述目标施工区域的海底地形环境进行扫描探测,获取相应的海底地形图像;
18、所述识别模块,用于从所述地形图像中识别出所述固定桩,并确定所述固定桩与所述水下机器人的相对位置关系。
19、可选的,所述扫描探测模块为多波束声呐扫描装置。
20、可选的,所述探测单元还包括固定桩定位模块;
21、所述固定桩定位模块,用于根据所述水下机器人对应的所述实时位置信息以及所述固定桩与所述水下机器人的所述相对位置关系确定所述固定桩对应的桩定位信息。
22、可选的,所述固定桩定位模块,还用于将所述桩定位信息发送至所述控制单元;
23、所述控制单元,还用于根据所述桩定位信息控制所述吊装设备移动所述导管架,使所述导管架靠近所述固定桩。
24、可选的,在所述导管架入水后,所述探测单元还用于探测识别所述导管架的水下部分,并确定所述导管架水下部分的实时位置与姿态。
25、从上面可以看出,本说明书实施例所提供的一种海上风电导管架施工测量系统,具有如下有益的技术效果:
26、所述海上风电导管架施工测量系统,利用探测单元206对目标施工区域进行精准探测,识别确定固定桩,过程中利用定位单元202获取实时位置信息,并利用稳定单元204保持探测单元206姿态稳定从而确保所述探测单元206探测识别结果的准确性与有效性,这样的方式在深水区依然能够实现对导管架的精确定位测量,保证施工精确性,提高施工效率。
技术特征:
1.一种海上风电导管架施工测量系统,其特征在于,所述系统包括施工船与水下机器人,所述施工船与所述水下机器人通过传输线缆连接;
2.根据权利要求1所述的系统,其特征在于,所述定位单元还用于将所述实时位置信息发送给所述控制单元;
3.根据权利要求1所述的系统,其特征在于,所述定位单元为超短基线定位装置。
4.根据权利要求1所述的系统,其特征在于,所述稳定单元包括姿态感知模块与姿态调整模块;
5.根据权利要求4所述的系统,其特征在于,所述姿态感知模块为高精度多轴光纤姿态仪。
6.根据权利要求1所述的系统,其特征在于,所述探测单元包括扫描探测模块与识别模块;
7.根据权利要求6所述的系统,其特征在于,所述扫描探测模块为多波束声呐扫描装置。
8.根据权利要求6所述的系统,其特征在于,所述探测单元还包括固定桩定位模块;
9.根据权利要求8所述的系统,其特征在于,所述固定桩定位模块,还用于将所述桩定位信息发送至所述控制单元;
10.根据权利要求1所述的系统,其特征在于,在所述导管架入水后,所述探测单元还用于探测识别所述导管架的水下部分,并确定所述导管架水下部分的实时位置与姿态。
技术总结
本说明书公开了一种海上风电导管架施工测量系统,能够在施工过程中实现精准定位测量,保证施工精确性,提高施工效率。所述系统包括施工船以及通过传输线缆连接的水下机器人。所述施工船包括控制单元与吊装设备;所述水下机器人包括机器人本体以及装载在所述机器人本体上的定位单元、稳定单元与探测单元;所述定位单元用于获取所述水下机器人的实时位置信息;所述稳定单元,用于在所述水下机器人行驶至所述目标施工区域后实时修正所述机器人本体的水下姿态,使所述机器人本体保持姿态稳定;所述探测单元设置在所述机器人本体下部,用于在所述目标施工区域中探测识别出预设的固定桩,所述固定桩用于与所述导管架对接。
技术研发人员:洪泽,罗玉涛,刘玉飞,潘东,王丽刚,常勇,余刚
受保护的技术使用者:华电重工股份有限公司
技术研发日:20230228
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!