水底清淤设备的制作方法
本技术涉及水下作业设备领域,具体而言,涉及一种水底清淤设备。
背景技术:
1、为了改善生态环境,需要对河道以及涵洞等位置的淤泥进行清理作业,人工清理劳动强度大,作业环境复杂,安全性低,因此,现有技术中越来越多的场合使用水下清淤机器人,目前,水下清淤机器人主要分为抽吸式和铲挖式。抽吸式机器人一般通过履带带动行走在水下,在行走过程中,对河道内的淤泥进行抽吸清理,抽吸获得的淤泥和污水混合物被储存在船舱中。
2、经发明人研究发现,现有的水下清淤机器人至少存在如下缺点:
3、由于水下地形环境复杂,机器人行走过程中受地形的限制较多,移动速度慢,姿态调整不便,导致清淤效果不佳;此外,清理得到的淤泥直接存储在船舱中,后续再统一运走进行处理,占用船舱较大空间,需要反复进行淤泥的转运作业,配套设施增加,处理成本高。
技术实现思路
1、本实用新型的目的在于提供一种水底清淤设备,其能够按需调整清淤机器人的姿态,从而适应水下复杂地形环境,受环境因素影响小,清淤效率高,清淤效果好;同时,淤泥在船舱进行处理,污水处理后可以排入河道,提高船舱容纳能力,能够储存更多淤泥,降低转运成本。
2、本实用新型的实施例是这样实现的:
3、本实用新型提供一种水底清淤设备,包括:
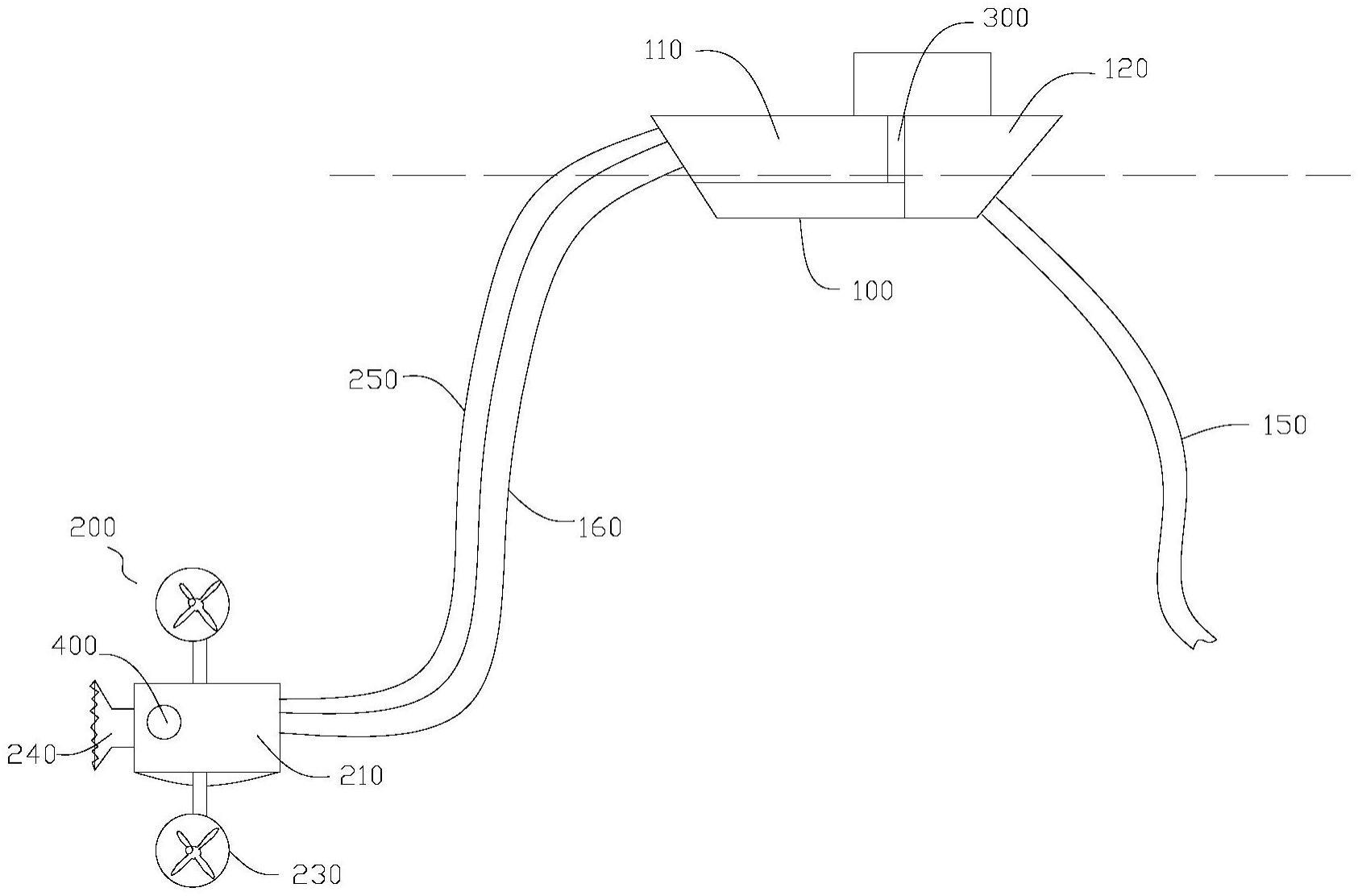
4、船体和清淤机器人,所述船体设置有淤泥腔和储水腔,所述淤泥腔与所述储水腔通过过滤装置隔开,所述过滤装置与所述船体可拆卸地连接;所述清淤机器人包括本体、行走履带、调位旋翼和清淤泵,所述本体通过线缆与所述船体连接,所述清淤泵安装于所述本体的前端,所述清淤泵通过输泥管与所述淤泥腔连接;所述调位旋翼和所述行走履带均安装于所述本体上,所述行走履带用于带动本体在水下行走,所述调位旋翼用于调节本体在水下的姿态。
5、在可选的实施方式中,所述淤泥腔和所述储水腔在所述船体的长度方向上间隔排布,且所述淤泥腔的底部高于所述储水腔的底部,以使所述淤泥腔和储水腔构成阶梯形。
6、在可选的实施方式中,所述过滤装置包括插框和过滤网,所述过滤网安装于所述插框围成的区域内,所述插框与所述船体可拆卸地连接。
7、在可选的实施方式中,所述船体上设置有相对的两个插槽,每组所述插槽在船体的高度方向上延伸,所述插框相对的两侧分别插接于所述两个插槽中,所述插框与所述插槽在所述船体的高度方向上可滑动地配合,以使所述插框能抽离所述插槽。
8、在可选的实施方式中,所述船体对应于所述淤泥腔的底壁上设置有定位槽,所述插框的底部插接于所述定位槽内。
9、在可选的实施方式中,所述过滤装置还包括多根防爆件,所述多根防爆件均安装于所述插框上,所述多根防爆件交叉设置,所述多根防爆件均位于所述过滤网靠近所述储水腔的一侧,用于与所述过滤网抵接,从而防止所述过滤网在淤泥的重力下过度变形。
10、在可选的实施方式中,所述调位旋翼的数量为两个,两个所述调位旋翼分别设于所述本体的左右两侧。
11、在可选的实施方式中,所述本体的侧部设置有收纳凹槽,所述收纳凹槽内设置有伸缩器,所述旋翼与所述伸缩器连接,所述伸缩器用于带动所述旋翼伸出或缩回所述收纳凹槽。
12、在可选的实施方式中,所述水底清淤设备还包括探测器,所述探测器安装于所述本体的顶部。
13、在可选的实施方式中,所述探测器包括均支架和均安装于支架上的声呐和摄像头,所述支架与所述本体的顶部连接。
14、本实用新型实施例的有益效果是:
15、综上所述,本实施例提供的水底清淤设备,船体行走于水面,利用线缆以及绳索等将清淤机器人下潜至设定位置,并且,在清淤机器人下潜过程中,能够配合调位旋翼,实时调整清淤机器人的形态,使清淤机器人能够平稳地到达水下设定位置,提高清淤机器人下潜过程的稳定性,提高下潜效率。同时,在清淤机器人行走于河道中时,在遇到坑洼或坡度较大的地形时,调位旋翼能够使清淤机器人悬浮一定高度,提高清淤机器人的通过性,也提高清淤机器人在复杂地形环境下行走时的平稳性,淤泥清理方便快捷,淤泥清理效率高,淤泥清理效果好。同时,在利用清淤泵产生的吸力吸入淤泥时,可以通过调位旋翼提供反作用,避免清淤机器人在清淤泵的吸力下前进,使得清淤机器人能够在悬停状态下进行作业,清淤效果好。清淤泵将淤泥吸入到淤泥腔后,在过滤装置的作用下,淤泥中的水能够穿过过滤装置并进入到储水腔中,储水腔中的水满足排放要求,能够直接从船体排放至河道中,通过对淤泥进行初步处理,能够减少污水所占用船舱空间,也便于后续淤泥的处理。
技术特征:
1.一种水底清淤设备,其特征在于,包括:
2.根据权利要求1所述的水底清淤设备,其特征在于:
3.根据权利要求2所述的水底清淤设备,其特征在于:
4.根据权利要求3所述的水底清淤设备,其特征在于:
5.根据权利要求4所述的水底清淤设备,其特征在于:
6.根据权利要求3-5中任一项所述的水底清淤设备,其特征在于:
7.根据权利要求1所述的水底清淤设备,其特征在于:
8.根据权利要求1所述的水底清淤设备,其特征在于:
9.根据权利要求1所述的水底清淤设备,其特征在于:
10.根据权利要求9所述的水底清淤设备,其特征在于:
技术总结
本申请提供一种水底清淤设备,水底清淤设备包括船体和清淤机器人,船体设置有淤泥腔和储水腔,淤泥腔与储水腔通过过滤装置隔开,过滤装置与船体可拆卸地连接。清淤机器人包括本体、行走履带、调位旋翼和清淤泵。本体通过线缆与船体连接,清淤泵安装于本体的前端,清淤泵通过输泥管与淤泥腔连接。调位旋翼和行走履带均安装于本体上,行走履带用于带动本体在水下行走,调位旋翼用于调节本体在水下的姿态。作业时,稳定性高,移动能力强,清淤范围大,清淤效果好,能够实现同步处理淤泥,过滤的污水能够排放至河道,降低处理成本。
技术研发人员:邓富升,郑敏,廖远华,吴定阳,冉浩然,杨攀,王可珂,汪鑫,汤文延
受保护的技术使用者:中国电建集团重庆工程有限公司
技术研发日:20230508
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!