解决复杂管道拥堵自适应全向机器人
本技术属于管道机器人领域,具体涉及解决复杂管道拥堵自适应全向机器人。
背景技术:
1、城市及家庭下水管道的清理和疏通是一个庞大而复杂的工程,管道直径种类众多,走向四通八达,管道清理工作环境恶劣,大多数情况下人员不可进入、人手难以触及。因此,研发一种管道机器人来代替人工工作,提高工作效率的同时又可保障工人的人身安全和健康,在管道的清理、检测和维护方面具有广阔的应用前景。
2、申请公布号cn108275216a公开了一种爬壁机器人的独立多吸盘爬臂系统机械结构设计,他包括主体、肩胛转块、爬臂气压缸和真空吸盘。该独立多吸盘爬臂系统通过肩胛转块的转动,实现爬壁机器人的移动,由于肩胛转块只能在一定角度范围内转动,所以爬壁机器人只能在平面实现移动。对于复杂管道,特备是t形的管道,爬壁机器人不能实现90度拐角移动。
3、申请公布号cn112224299a公开了一种仿鲍鱼式吸盘爬壁机器人,其包括括前轮部分、后轮部分、用于连接前轮部分和后部分的机械臂部分,所述前轮部分和后轮部分均设置有仿鲍鱼式吸盘,机械臂部分包括通过从动关节连接的前机械臂和后机械臂,前机械臂与前轮部分、后机械臂与后轮部分均通过驱动关节和转向关节连接,前后机械臂之间的夹角在30°~150°之间。该爬壁机器人通过永磁体小车,采用磁吸的方式,吸附在被吸附物表面;再进行90度拐角移动;也可以通过吸盘吸附在被吸附物表面,再进行90度拐角移动,但是吸盘能吸附被吸附物,前提在于永磁体小车要吸附在被吸附物表面,让吸盘与被吸附物之间保持密封。综上,该机器人只能用于金属的管壁,必须得满足永磁体小车能吸附管道内壁这个前提。
4、因此,不难看出,现有技术中,没有能应用于非金属的管壁,且能全面移动的机器人。
技术实现思路
1、为了克服现有技术中的不足,本实用新型提出解决复杂管道拥堵自适应全向机器人,其为了解决如何在非金属管道内壁稳定地移动同时,能应对复杂的管道的技术问题。
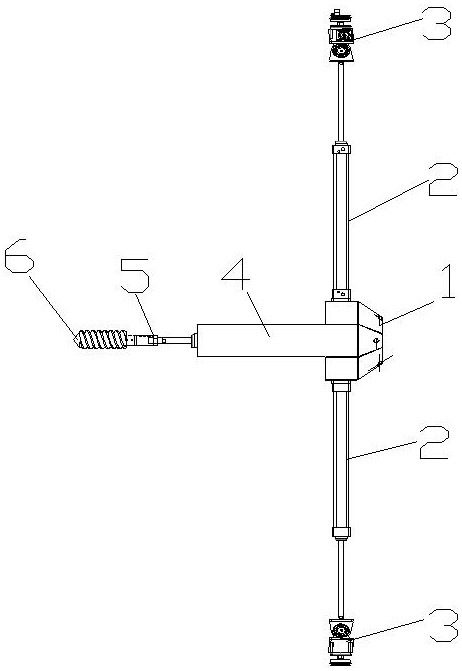
2、为了实现上述目的,本实用新型的解决复杂管道拥堵自适应全向机器人,包括安装座,所述安装座上固定有两个伸缩件,两个伸缩件的轴线重合,且两个伸缩件中心对称设置;两个伸缩件的伸缩轴上固定有下连接耳,下连接耳上通过偏转轴转动连接有上连接耳,偏转轴的轴线垂直于伸缩轴轴线;安装座上固定有摄像头;上连接耳上固定有用于驱动下连接耳绕偏转轴轴线转动的偏转电机;上连接耳上设有用于带动上连接耳转动的转向电机,转动电机的外壳上连接有吸盘,转动电机的转轴与上连接耳连接;转向电机的转轴与偏转轴的轴线垂直,且转向电机的转轴轴线能与伸缩轴轴线重合;所述机器人还包括用于破坏堵塞物的钻头;吸盘上设有用于控制吸盘吸附的控制组件。
3、进一步地,所述伸缩件为电动伸缩杆或者气缸。
4、进一步地,所述转向电机的外壳上固定有设备框,设备框朝向吸盘的一侧表壁上固定有压力传感器,吸盘固定在压力传感器背向设备框的一侧表壁上。
5、可以判断吸盘与管道内壁产生的压力,从而宽泛地认为吸盘与管道内壁之间已经没有了空气,再通过气泵进行抽气,就可以将吸盘稳固地吸附在管道上。
6、进一步地,所述控制组件包括气道,吸盘与管道的接触端与气道的其中一端连通,气道的另一端设有三通管,三通管的其中一端与气道连通,三通管的另外两端管壁中分别固定有单向阀和电磁阀,三通管设置有单向阀的一端固定有用于将三通管中空气抽出的气泵。
7、利用单向阀和电磁阀,可以自动控制单个吸附组件与管道内壁之间失去吸附能力,从而自由地实现机器人沿管道行走。
8、进一步地,所述安装座上固定有第二电动伸缩杆,第二电动伸缩杆的伸缩轴上固定有破壁电机,钻头固定在破壁电机的转轴上。
9、利用第二电动伸缩杆,使钻头能够伸长,从而能准确地到达管道的堵塞处,并利用钻头破坏堵塞处的堵塞物。
10、有益效果:
11、本机器人设置了偏转电机和转向电机,使整个机器人能向管道的各个方向移动,不仅仅只能行走于直管道,还能行走于t字形等复杂管道。设置了吸盘、气泵和单向阀,能给吸盘稳固地吸附管道内壁提供一定地保证,可以应用于非金属管壁。
技术特征:
1.解决复杂管道拥堵自适应全向机器人,其特征在于,包括安装座,所述安装座上固定有两个伸缩件,两个伸缩件的轴线重合,且两个伸缩件中心对称设置;两个伸缩件的伸缩轴上固定有下连接耳,下连接耳上通过偏转轴转动连接有上连接耳,偏转轴的轴线垂直于伸缩轴轴线,上连接耳上固定有用于驱动下连接耳绕偏转轴轴线转动的偏转电机;安装座上固定有摄像头;
2.根据权利要求1所述的解决复杂管道拥堵自适应全向机器人,其特征在于,所述伸缩件为电动伸缩杆或者气缸。
3.根据权利要求1所述的解决复杂管道拥堵自适应全向机器人,其特征在于,所述控制组件包括气道,吸盘与管道的接触端与气道的其中一端连通,气道的另一端设有三通管,三通管的其中一端与气道连通,三通管的另外两端管壁中分别固定有单向阀和电磁阀,三通管设置有单向阀的一端固定有用于将三通管中空气抽出的气泵。
4.根据权利要求1所述的解决复杂管道拥堵自适应全向机器人,其特征在于,所述安装座上固定有第二电动伸缩杆,第二电动伸缩杆的伸缩轴上固定有破壁电机,钻头固定在破壁电机的转轴上。
技术总结
本技术的解决复杂管道拥堵自适应全向机器人,属于机器人领域,包括安装座,所述安装座上固定有两个伸缩件,两个伸缩件的轴线重合,且两个伸缩件中心对称设置;两个伸缩件的伸缩轴上固定有下连接耳,下连接耳上通过偏转轴转动连接有上连接耳,偏转轴的轴线垂直于伸缩轴轴线,上连接耳上固定有用于驱动下连接耳绕偏转轴轴线转动的偏转电机;上连接耳上设有用于带动上连接耳转动的转向电机,转动电机的外壳上连有吸盘,转动电机的转轴与上连接耳连接;转向电机的转轴与偏转轴的轴线垂直,且转向电机的转轴轴线能与伸缩轴轴线重合;所述机器人还包括用于破坏堵塞物的钻头;吸盘上设有用于控制吸盘吸附的控制组件。本机器人能行走于复杂的管道。
技术研发人员:赵霖博,朱嘉烨,李旺,刘仡然,李晓甫
受保护的技术使用者:河海大学
技术研发日:20230612
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!