一种混合总线清淤封堵气囊的控制装置的制作方法
本技术涉及管道封堵,具体为一种混合总线清淤封堵气囊的控制装置。
背景技术:
1、在市政工程中,经常需要将污水管道进行局部的清淤封堵,并把污水管道中的水抽出,以利施工人员进入污水管道中作业,传统的污水管封堵方法是采用人工封堵气囊堵水。
2、目前也有气囊封堵机器人,代替蛙人下井,将气囊封堵装置放入井下,气囊膨胀对井口进行封堵。但是机器人控制系的线路,有强电连接,也有通信线路的连接而强电对通信线路存在信号干扰问题,信号传输不稳定。
技术实现思路
1、本实用新型所要解决的技术问题在于:解决气囊封堵机器人的控制系统中,强电对通讯信号的干扰问题。
2、为解决上述技术问题,本实用新型提供如下技术方案:
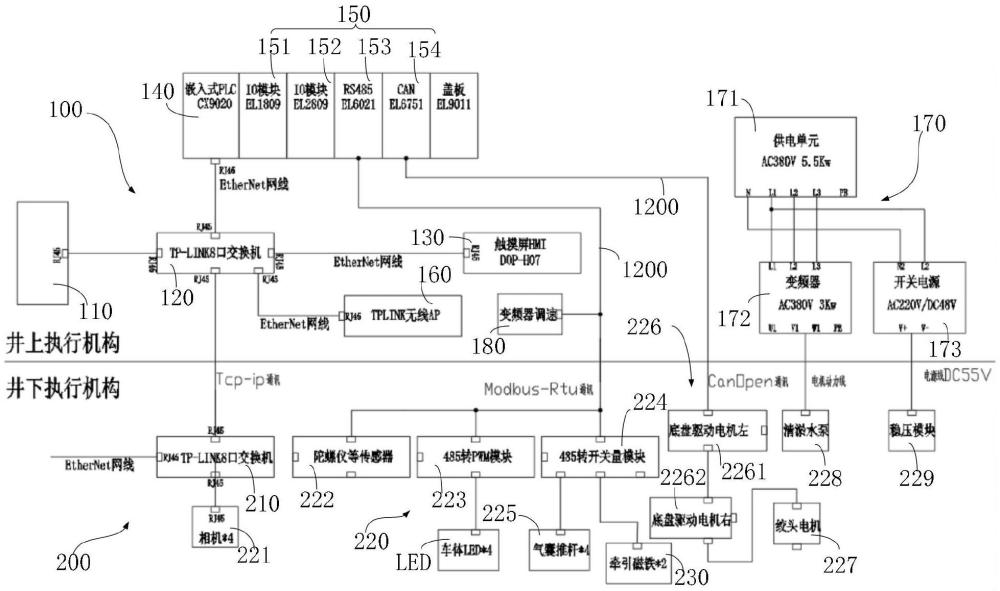
3、一种混合总线清淤封堵气囊的控制装置,包括:井上执行机构(100)以及与所述井上执行机构(100)通过双绞屏蔽电缆(1200)连接的井下执行机构(200);
4、所述井上执行机构(100)包括终端装置(110)、第一八口交换机(120)、触摸屏(130)、plc装置(140)、多个plc模块(150)、无线ap(160)和供电装置(170);所述plc装置(140)分别与所述终端装置(110)、所述触摸屏(130)、多个所述plc模块(150)、所述无线ap(160)通过所述第一八口交换机(120)连接;
5、所述井下执行机构(200)位于清淤封堵气囊机器人上,包括第二八口交换机(210)和车体装置(220);所述第二八口交换机(210)与第一八口交换机(120)通过所述双绞屏蔽电缆(1200)连接,所述车体装置(220)与所述多个plc模块(150)通过所述双绞屏蔽电缆(1200)连接;所述供电装置(170)与所述车体装置(220)的清淤水泵(228)通过电机动力线连接,与所述车体装置(220)的稳压模块(229)通过电源线连接。
6、在本实用新型的一实施例中,所述车体装置(220)包括相机(221)、多个传感器(222)、485转的pwm模块(223)、485转开关量模块放(224)、车体灯(led)、气囊推杆(225)、车体电机(226)、清淤绞头电机(227)、清淤水泵(228)和稳压模块(229);
7、所述相机(221)与所述第二八口交换机(210)连接;所述多个传感器(222)、所述485转pwm模块(223)和所述485转开关量模块放(224)与所述多个plc模块(150)连接;所述车体灯(led)与所述485转的pwm模块(223)连接;所述气囊推杆(225)与所述485转开关量模块放(224)连接;所述车体电机(226)和清淤绞头电机(227)与所述多个plc模块(150)连接;所述清淤水泵(228)和所述稳压模块(229)与所述供电装置(170)连接。
8、在本实用新型的一实施例中,所述多个plc模块(150)与所述plc装置(140)连接,包括第一io模块(151);
9、所述第一io模块(151)上设置有操控面板,所述操控面板包括急停按钮(sb3)、hmi自动按钮(sb4)、hmi远程按钮(sb5)、复位按钮(sb6)和hmi急停按钮(sb7);所述急停按钮(sb3)、所述hmi自动按钮(sb4)、所述hmi远程按钮(sb5)、所述复位按钮(sb6)和所述hmi急停按钮(sb7)的一端接24v电源;
10、所述急停按钮(sb3)、所述hmi自动按钮(sb4)、所述hmi远程按钮(sb5)、所述复位按钮(sb6)和所述hmi急停按钮(sb7)的另一端分别与所述第一io模块(151)的第一引脚至第五引脚连接。
11、在本实用新型的一实施例中,所述多个plc模块(150)还包括第二io模块(152);所述第二io模块(152)上设置有线圈ka1、线圈ka2、线圈ka3、线圈ka4以及常开触点ka1-1、常开触点ka1-3、常开触点ka2-1、常开触点ka2-3、常开触点ka3-1、常开触点ka3-3、常开触点ka4-1和常开触点ka4-3;
12、所述线圈ka1和所述线圈ka2的一端分别与所述第二io模块152的第九引脚和第十引脚连接,另一端接0v电源;所述常开触点ka1-1和所述常开触点ka2-3的一端分别与所述气囊推杆(225)的正极连接,另一端分别接12v电源;所述常开触点ka1-3和所述常开触点ka2-1的一端分别与所述气囊推杆(225)的负极连接,另一端分别接0v电源;
13、所述线圈ka3和所述线圈ka4的一端接0v电源,另一端分别与所述第二io模块(152)的第七引脚和第八引脚连接;所述常开触点ka3-1和所述常开触点ka4-3的一端与所述清淤绞头电机(227)配合运动的绞头推杆的正极连接,所述常开触点ka3-1另一端接24v电源,所述常开触点ka4-3的另一端与接0v电源;所述常开触点ka3-3和所述常开触点ka4-1的一端与所述绞头推杆的负极连接,所述常开触点ka3-3的另一端接0v电源,所述常开触点ka4-1的另一端接24v电源。
14、在本实用新型的一实施例中,所述多个plc模块(150)还包括rs485模块(153);所述rs485模块(153)上设置有232转485转换器(1521),所述rs485模块(153)的第一引脚和第二引脚连接后,与所述232转485转换器(1521)的t/r+端口连接,所述rs485模块(153)的第五引脚和第六引脚连接后,与所述232转485转换器(1521)的t/r-端口连接。
15、在本实用新型的一实施例中,所述多个传感器(222)包括压力采集模块(2221)、真空压力传感器(2222)、姿态传感器(2223)和温湿度传感器(2224);
16、所述压力采集模块(2221)的接口data+和接口data-分别与所述t/r+端口和t/r-端口连接;所述压力采集模块(2221)的pw+端口和gnd端口分别接24v电源和0v电源;
17、真空压力传感器(2222)的out+端口和out-/in-端口分别与所述压力采集模块(2221)的in+端口和in-端口连接,所述真空压力传感器(2222)的in+端口接24v电源;
18、所述姿态传感器(2223)的485a端口和485b端口分别与所述t/r+端口和t/r-端口连接,所述姿态传感器(2223)的vcc端口接24v电源,gnd端口接0v电源;
19、所述温湿度传感器(2224)的485a端口和485b端口分别与所述t/r+端口和t/r-端口连接,所述温湿度传感器(2224)的v+端口接24v电源,v-端口接0v电源。
20、在本实用新型的一实施例中,所述多个plc模块(150)还包括can模块(154);所述can模块(154)与所述车体电机(226)和所述清淤绞头电机(227)连接;
21、所述清淤绞头电机(227)的第五引脚与所述can模块(154)的can-l端连接,所述清淤绞头电机(227)的第六引脚与所述can模块(154)的can-h端连接;车体电机(226)包括左轮电机和右轮电机,所述左轮电机的第五引脚和第六引脚分别与所述清淤绞头电机(227)的第七引脚和第八引脚连接;所述右轮电机的第五引脚和第六引脚分别与所述左轮电机的第七引脚和第八引脚连接;以及所述can模块(154)与所述清淤绞头电机(227)之间和所述右轮电机的第七引脚和第八引脚之间分别并联有一个电阻。
22、在本实用新型的一实施例中,所述车体灯(led)包括第一车体灯、第二车体灯、第三车体灯和第四车体灯;每个车体灯的pwm+端口分别与所述485转pwm模块(223)的ch1端口、ch2端口、ch3端口和ch4端口连接;每个车体灯的pwm-端口均与所述485转pwm模块(223)的gnd端口连接;每个车体灯的in+的端口接24v电源,in-接0v电源,led+端口和led-端口之间串联的两个灯珠;以及所述485转pwm模块(223)的data+端口和data-端口分别与所述t/r+端口和t/r-端口连接;所述485转pwm模块(223)的pw+端口接24v电源,gnd端口接0v电源。
23、在本实用新型的一实施例中,所述485转开关量模块放(224)的data+端口和data-端口分别与所述t/r+端口和t/r-端口连接;所述485转开关量模块放(224)的pw+端口接24v电源,gnd端口接0v电源;牵引磁铁(230)的一端与所述485转开关量模块放(224)的rlond端口连接,另一端接电源0v,以及所述485转开关量模块放(224)的rlocdm端口接24v电源。
24、在本实用新型的一实施例中,供电装置(170)包括供电单元(171),所述供电单元(171)内设置有第一接线端子(xt1)、第二接线端子(xt2)、第三接线端子(xt3)和第四接线端子(xt4);所述第一接线端子(xt1)与所述清淤水泵(228)连接;所述第二接线端子(xt2)与所述第一八口交换机(120)、所述触摸屏(130)、plc装置(140)、多个plc模块(150)和所述相机(221)连接;所述第三接线端子(xt3)与所述气囊推杆(225)连接;所述第四接线端子(xt4)与车体装置(220)连接。
25、与现有技术相比,本实用新型的有益效果是:双绞屏蔽电缆进行分成两股处理,水泵动力线和电源线一路,六类屏蔽网线和两对两芯屏蔽双绞线一路,水泵动力线和电源线给机器人小车供电,六类屏蔽网线和两对两芯屏蔽双绞线进行通讯信号的传输和控制,有效的解决强电对于通讯信号的干扰问题。供电装置的四个接线端子功能不一,分开布线,便于接线,防止干扰。ac/dc模块和dc/dc模块均起到稳定电压的作用,防止柴油发电机组放电过程中压降导致机器人供电不稳定,停止按钮sb2能够快速高效地切断机器人小车和电源控制箱的电源。继电器的线圈ka1和线圈ka2控制气囊推杆动作,即通过小电流控制大电流可以起到保护多个plc模块的作用,同时继电器分担气囊推杆过载短路大电流的风险。操控面板上两路急停按钮使得机器人出现危险时候更安全一点,复位按钮能够保证危险解除后,对机器人进行复位操作,增加人工判别,防止意外操作导致的危险。两个120欧姆的电阻接到关节电机的首尾两端,整个回路形成60欧姆的电阻,抗干扰能力最强,同时整个can回路采用串联接法,这种接线方式最稳定可靠。rs485硬件接口直接从plc模块引出至传感器,比间接任何转换模块信号更稳定。
- 还没有人留言评论。精彩留言会获得点赞!