打桩机的控制方法及打桩机的液压系统与流程
本发明涉及工程机械,尤其涉及一种打桩机的控制方法及打桩机的液压系统。
背景技术:
1、目前打桩机采用挖掘机底盘增加振动锤头,实现把钢板桩或者护筒桩,利用锤头振松土壤,借助动臂、斗杆或者整机的力把桩打入地下,防止施工时候周边土壤发生坍塌,当施工完成后,再把桩拔出来。打桩机打桩时,随着桩被打入越深,打入的阻力越大,在最后一段距离,打桩的阻力达到最大;打桩机拔桩时,随着桩被拔出越多,拔出的阻力越小,在最开始一段距离,拔桩的阻力最大。
2、目前在锤头遇到难打或难拔的工况时,主要方法就是提升主溢流阀的压力,提升动臂和斗杆的输出的拉力或者向下的压力,系统主溢流压力提升后,锤头的溢流压力相应提升,使锤头转速相对于低溢流压力,提升部分流量,锤头频率能够上升几十转,然而长时间进行溢流振动,把桩给打进入或者拔出来,效率低,浪费了大量的高压油液。
技术实现思路
1、本发明的目的在于提供一种打桩机的控制方法及打桩机的液压系统,提高了打桩或拔桩效率。
2、为达此目的,本发明采用以下技术方案:
3、一种打桩机的控制方法,包括:
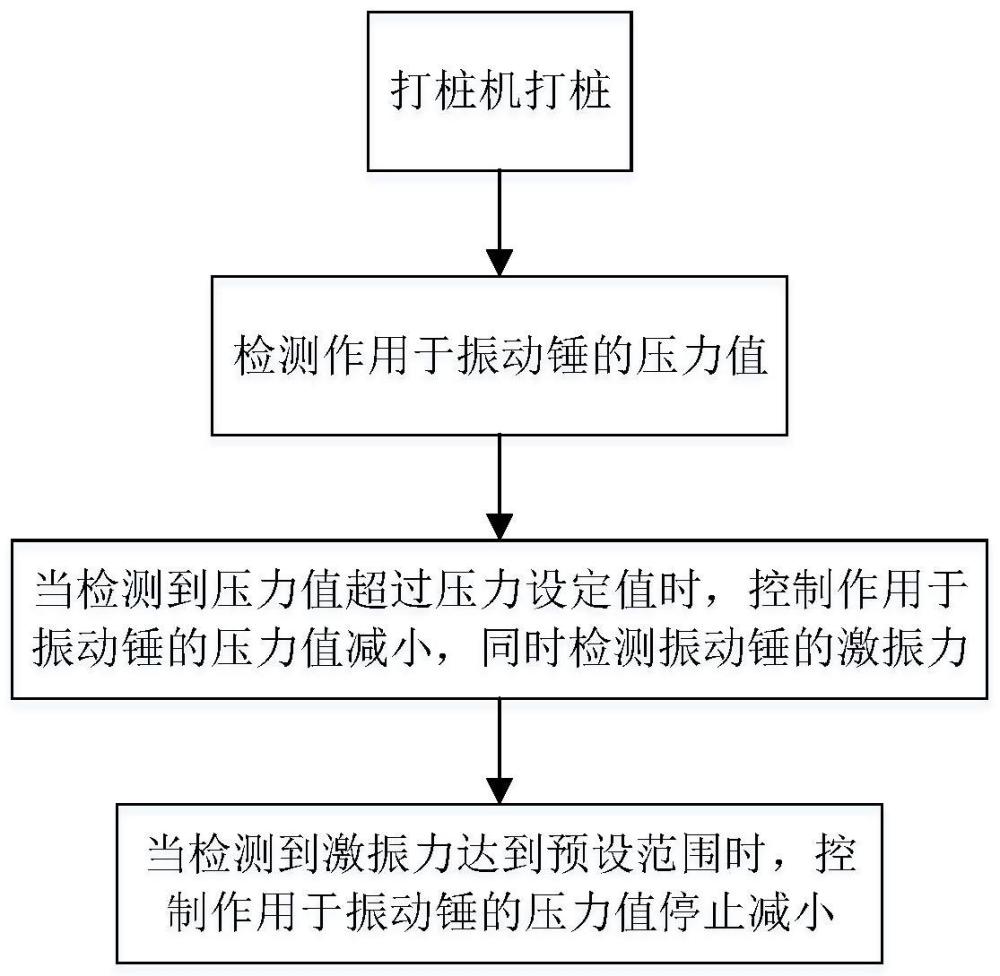
4、打桩机打桩时,检测作用于振动锤的压力值,当检测到压力值超过压力设定值时,则控制作用于振动锤的压力值减小,同时检测振动锤的激振力,当检测到激振力达到预设范围时,则控制作用于振动锤的压力值停止减小;
5、打桩机拔桩时,检测作用于振动锤的拉力值,当检测到拉力值超过拉力设定值时,则控制作用于振动锤的拉力值减小,同时检测振动锤的激振力,当检测到激振力达到预设范围时,则控制作用于振动锤的拉力值停止减小。
6、作为打桩机的控制方法的优选技术方案,当检测所述振动锤的激振力时,同时检测所述振动锤的振动幅度,当检测到所述激振力达到预设范围,同时检测到所述振动幅度达到预设幅度时,则控制作用于所述振动锤的压力值或拉力值停止减小。
7、作为打桩机的控制方法的优选技术方案,作用于所述振动锤的压力或拉力由动臂施加,所述动臂由动臂油缸驱动,油液经第二主阀供给所述动臂油缸,通过控制所述第二主阀的阀芯动作来控制所述动臂作用于所述振动锤的压力值或拉力值的大小;
8、或者,作用于所述振动锤的压力或拉力由斗杆施加,所述斗杆由斗杆油缸驱动,油液经第三主阀供给所述斗杆油缸,通过控制所述第三主阀的阀芯动作来控制斗杆作用于所述振动锤的压力值或拉力值的大小。
9、作为打桩机的控制方法的优选技术方案,所述振动锤的减震块上设置有拉压力传感器,作用于所述振动锤上的压力值或拉力值由所述拉压力传感器测得。
10、作为打桩机的控制方法的优选技术方案,所述振动锤的激振力为f,f=mr·(2πf)2,其中m为偏心块的质量,单位为千克(kg);r为偏心半径参数,单位为米(m);f为振动频率,单位为赫兹(hz);
11、因此通过检测所述振动锤的振动频率就能计算出激振力。
12、作为打桩机的控制方法的优选技术方案,所述振动锤上设置有频率传感器,所述振动锤的振动频率由所述频率传感器测得。
13、作为打桩机的控制方法的优选技术方案,所述振动锤的振动频率为f,f=q/v,其中q为振动马达的流量,v为振动马达的排量;
14、所述振动马达的排量为定值,因此通过检测所述振动马达的流量就能计算出振动频率,进而计算出激振力。
15、作为打桩机的控制方法的优选技术方案,所述振动马达的进油路上设置有流量传感器,所述振动马达的流量由所述流量传感器测得。
16、作为打桩机的控制方法的优选技术方案,所述振动锤上设置有振幅传感器,所述振动锤的振动幅度由所述振幅传感器测得。
17、一种打桩机的液压系统,采用如上任一方案所述的打桩机的控制方法。
18、本发明的有益效果:
19、本发明提供一种打桩机的控制方法,通过控制作用于振动锤的压力或拉力的大小来控制振动锤的总负载,从而提升振动锤的振动频率,进而提升振动锤的激振力,确保振动锤有足够的激振力,也有适量的压力或拉力,提高打桩或拔桩效率。
技术特征:
1.一种打桩机的控制方法,其特征在于,包括:
2.根据权利要求1所述的打桩机的控制方法,其特征在于,当检测所述振动锤的激振力时,同时检测所述振动锤的振动幅度,当检测到所述激振力达到预设范围,同时检测到所述振动幅度达到预设幅度时,则控制作用于所述振动锤的压力值或拉力值停止减小。
3.根据权利要求1或2所述的打桩机的控制方法,其特征在于,作用于所述振动锤的压力或拉力由动臂施加,所述动臂由动臂油缸驱动,油液经第二主阀供给所述动臂油缸,通过控制所述第二主阀的阀芯动作来控制所述动臂作用于所述振动锤的压力值或拉力值的大小;
4.根据权利要求1或2所述的打桩机的控制方法,其特征在于,所述振动锤的减震块上设置有拉压力传感器,作用于所述振动锤上的压力值或拉力值由所述拉压力传感器测得。
5.根据权利要求1或2所述的打桩机的控制方法,其特征在于,所述振动锤的激振力为f,f=mr·(2πf)2,其中m为偏心块的质量,单位为千克(kg);r为偏心半径参数,单位为米(m);f为振动频率,单位为赫兹(hz);
6.根据权利要求5所述的打桩机的控制方法,其特征在于,所述振动锤上设置有频率传感器,所述振动锤的振动频率由所述频率传感器测得。
7.根据权利要求5所述的打桩机的控制方法,其特征在于,所述振动锤的振动频率为f,f=q/v,其中q为振动马达的流量,v为振动马达的排量;
8.根据权利要求7所述的打桩机的控制方法,其特征在于,所述振动马达的进油路上设置有流量传感器,所述振动马达的流量由所述流量传感器测得。
9.根据权利要求2所述的打桩机的控制方法,其特征在于,所述振动锤上设置有振幅传感器,所述振动锤的振动幅度由所述振幅传感器测得。
10.一种打桩机的液压系统,其特征在于,采用如权利要求1-9任一项所述的打桩机的控制方法。
技术总结
本发明公开一种打桩机的控制方法及打桩机的液压系统。控制方法包括:打桩机打桩时,检测作用于振动锤的压力值,当检测到压力值超过压力设定值时,则控制作用于振动锤的压力值减小,同时检测振动锤的激振力,当检测到激振力达到预设范围时,则控制作用于振动锤的压力值停止减小;打桩机拔桩时,检测作用于振动锤的拉力值,当检测到拉力值超过拉力设定值时,则控制作用于振动锤的拉力值减小,同时检测振动锤的激振力,当检测到激振力达到预设范围时,则控制作用于振动锤的拉力值停止减小。通过控制作用于振动锤的压力或拉力来控制振动锤的总负载,从而提升振动锤的激振力,确保振动锤有足够的激振力,也有适量的压力或拉力,提高打桩或拔桩效率。
技术研发人员:王凯,董立队,姚运飞,张学强
受保护的技术使用者:山东临工工程机械有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!