一种桥梁施工用的安全施工平台的制作方法
1.本发明涉及一种施工平台,尤其涉及一种桥梁施工用的安全施工平台。
背景技术:
2.桥梁施工平台是指为了进行桥梁基础水上施工而搭设的作业场地,传统的固定式吊平台设计为π形结构,施工时将整个平台固定在钢梁上,钢梁安装完成后在桥面板安装前必须将平台拆除后方能施工,如此一方面影响施工进度,另一方面平台拆除过程中存在安全风险,而且,传统的吊平台移动需采用桥面吊机等吊装设备起吊移动,此过程中施工人员需临空安装及拆除该平台,安全风险极高,同时,由于钢梁悬臂吊装、高栓施工和小纵梁安装时施工人员均为高空、悬空作业,安全风险较高,对作业人员心里影响较大。
3.专利申请cn210420875u,公开日为2020.04.28,公开了一种安全的桥梁施工平台,包括有已完成主梁、正拼装主梁、上层平台、下层平台、栏杆、爬梯和爬梯栏杆等,所述已完成主梁的一侧设置有正拼装主梁,所述正拼装主梁的两侧均设置有上层平台,所述正拼装主梁的下方设置有下层平台,所述上层平台的外侧设置有栏杆,所述上层平台和下层平台之间设置有爬梯,所述爬梯的两侧均设置有爬梯栏杆,该安全的桥梁施工平台,采用两侧悬挂式对称布置,实现横向可折叠式,以适应桥梁截面变化,下方连接可实现主梁两侧人员互动或行走,结合主梁截面构造实现纵向可牵引或可顶升式平移,具有可折叠、纵向和横向尺寸可调节以及可自动化移动的功能,然而该装置体积较大,结构过于复杂,经济成本较高。
4.因此,亟待设计一种风险较低,能够自动升降且方便移动的桥梁施工用的安全施工平台。
技术实现要素:
5.为了克服现有的施工平台安全风险较高,不能自动升降且移动不方便的缺点,本发明的技术问题为:提供一种风险较低,能够自动升降且方便移动的桥梁施工用的安全施工平台。
6.本发明的技术方案为:一种桥梁施工用的安全施工平台,包括有:底板和围栏,底板上设有围栏;升降机构,底板上设有升降机构,升降机构与围栏连接;移动板,升降机构上设有移动板;支撑架,移动板顶部设有两根支撑架;挡板,两根支撑架顶部之间连接有挡板;攀爬机构,移动板上设有攀爬机构,攀爬机构与挡板接触;承重机构,移动板内部设有承重机构。
7.在本发明一个较佳实施例中,升降机构包括有:固定脚,底板两侧均设有固定脚,固定脚与围栏连接;第一电动推杆,两个固定脚上部内侧均设有第一电动推杆,第一电动推杆的伸缩
杆与移动板连接;第一接触开关,围栏上侧设有第一接触开关;第二接触开关,围栏上部设有第二接触开关。
8.在本发明一个较佳实施例中,攀爬机构包括有:第一固定块,移动板上设有两块第一固定块;安装板,移动板底侧设有安装板;安装环,安装板上设有安装环;减速电机,安装环内侧安装有减速电机;第一转轴,两块第一固定块之间转动式连接有第一转轴,第一转轴与减速电机的输出轴连接;梯子,第一转轴上设有梯子,梯子与挡板接触;扶手,梯子两侧均设有扶手;距离传感器,梯子顶部设有距离传感器。
9.在本发明一个较佳实施例中,承重机构包括有:滑杆,移动板内部滑动式设有四根滑杆;承重板,四根滑杆顶部之间连接有承重板,承重板与移动板滑动式连接;弹簧,四根滑杆上均绕有弹簧,弹簧连接在移动板与承重板之间;压力传感器,移动板顶侧中部设有压力传感器,压力传感器与承重板配合。
10.在本发明一个较佳实施例中,还包括有移动机构,移动机构包括有:第二电动推杆,底板中部内侧设有第二电动推杆;推动架,第二电动推杆的伸缩杆顶部设有推动架,推动架与底板滑动式连接;第二转轴,推动架底部内侧转动式设有四根第二转轴;滚轮,四根第二转轴上均设有滚轮,滚轮与底板滑动式连接。
11.在本发明一个较佳实施例中,还包括有辅助机构,辅助机构包括有:第二固定块,底板两侧均设有两块第二固定块;第三转轴,四块第二固定块内侧均转动式设有第三转轴;第一转杆,四根第三转轴上均设有第一转杆;第四转轴,四根第一转杆上部内侧均设有第四转轴;固定座,移动板两侧均设有四个固定座;第五转轴,相邻的两个固定座之间转动式连接有第五转轴,第五转轴的数量为四根;第二转杆,四根第五转轴上均设有第二转杆,第二转杆与第四转轴转动式连接。
12.在本发明一个较佳实施例中,还包括有保护机构,保护机构包括有:安装座,移动板底部设有两个安装座;第三电动推杆,两个安装座内侧均设有第三电动推杆;推动杆,两根第三电动推杆的伸缩杆顶部均设有推动杆;固定环,两根推动杆上均设有两个固定环;围挡,四个固定环之间连接有围挡,围挡与移动板滑动式连接。
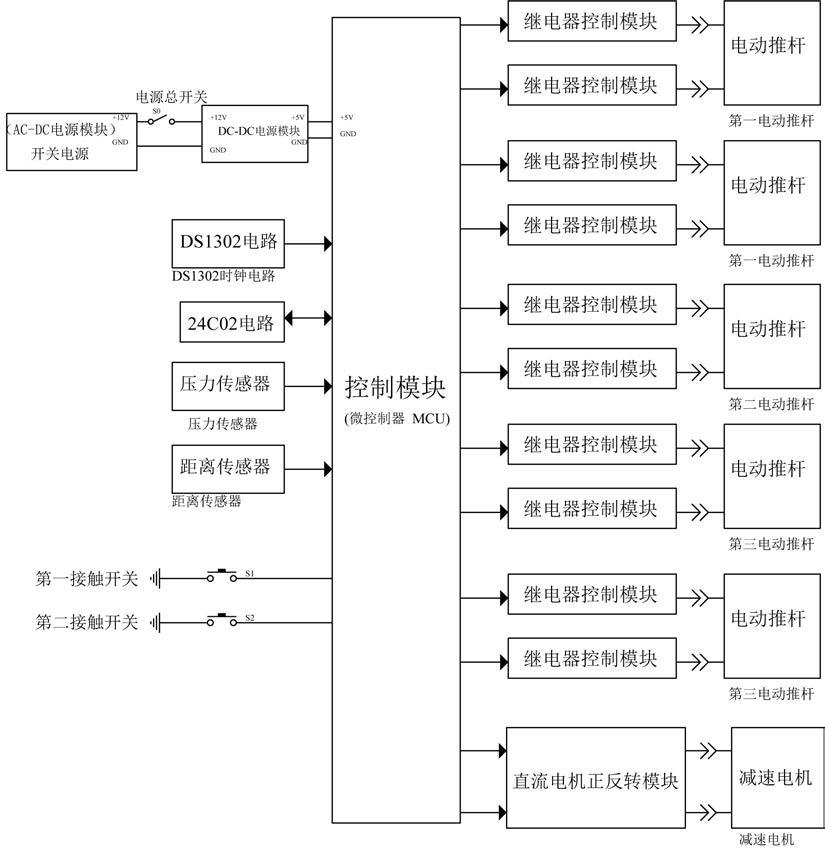
13.在本发明一个较佳实施例中,还包括有控制箱,围栏上设有控制箱,控制箱内安装
有开关电源、控制模块和电源模块,开关电源为桥梁施工用的安全施工平台供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一接触开关和第二接触开关均与控制模块通过电性连接,第一电动推杆、第二电动推杆和第三电动推杆均与控制模块通过继电器控制模块连接,减速电机与控制模块通过直流电机正反转模块连接。
14.有益效果为:1、本发明通过设有升降机构,升降机构运转能够使移动板上下移动,从而达到了自动升降的效果,进而方便人们调节平台的高度;2、本发明通过设有攀爬机构和承重机构,工作人员通过攀爬机构向上攀爬,然后站在承重机构上,待施工结束后,工作人员再通过攀爬机构离开承重机构,如此非常便利;3、本发明通过设有移动机构,移动机构能够辅助人们移动该施工平台,进而方便工作人员在不同位置进行施工;4、本发明通过设有辅助机构和保护机构,辅助机构能够对移动板起到辅助支撑的作用,同时保护机构能够防止工作人员施工时从移动板上向下掉落,如此较为安全。
附图说明
15.图1为本发明的第一视角立体结构示意图。
16.图2为本发明的第二视角立体结构示意图。
17.图3为本发明的部分立体结构示意图。
18.图4为本发明的升降机构立体结构示意图。
19.图5为本发明的攀爬机构第一部分立体结构示意图。
20.图6为本发明的攀爬机构第二部分立体结构示意图。
21.图7为本发明的承重机构第一部分立体结构示意图。
22.图8为本发明的承重机构第二部分立体结构示意图。
23.图9为本发明的移动机构第一部分立体结构示意图。
24.图10为本发明的移动机构第二部分立体结构示意图。
25.图11为本发明的辅助机构立体结构示意图。
26.图12为本发明的辅助机构剖面立体结构示意图。
27.图13为本发明的保护机构立体结构示意图。
28.图14为本发明的电路框图。
29.图15为本发明的电路原理图。
30.附图中的标记:1:底板,2:围栏,3:移动板,4:支撑架,5:挡板,6:控制箱,7:升降机构,71:固定脚,72:第一电动推杆,73:第一接触开关,74:第二接触开关,8:攀爬机构,81:第一固定块,82:安装环,83:减速电机,84:第一转轴,85:梯子,86:扶手,87:安装板,88:距离传感器,9:承重机构,91:滑杆,92:弹簧,93:承重板,94:压力传感器,10:移动机构,101:第二电动推杆,102:推动架,103:第二转轴,104:滚轮,11:辅助机构,111:第二固定块,112:第三转轴,113:第一转杆,114:第四转轴,115:第二转杆,116:第五转轴,117:固定座,12:保护机构,121:安装座,122:第三电动推杆,123:推动杆,124:固定环,125:围挡。
具体实施方式
31.下面结合附图详细说明本发明的优选技术方案。
32.实施例1一种桥梁施工用的安全施工平台,如图1
‑
8所示,包括有底板1、围栏2、移动板3、支撑架4、挡板5、升降机构7、攀爬机构8和承重机构9,底板1上设有围栏2,底板1上设有升降机构7,升降机构7与围栏2连接,升降机构7上设有移动板3,移动板3顶部左右两侧均设有支撑架4,两根支撑架4顶部之间连接有挡板5,移动板3前部设有攀爬机构8,攀爬机构8与挡板5接触,移动板3内部设有承重机构9。
33.人们按下电源总开关,将该施工平台上电,然后人们使升降机构7运转,进而使移动板3向上移动,继而使承重机构9、支撑架4和挡板5向上移动,同时升降机构7使攀爬机构8运转,待攀爬机构8触碰地面后,攀爬机构8停止运转,待移动板3移至所需高度后,人们使升降机构7停止运转,使得移动板3和挡板5停止移动,随后工作人员爬上攀爬机构8,然后踩在承重机构9中,随后工作人员进行施工,此时挡板5可为工作人员遮阳挡雨,待施工结束后,工作人员通过攀爬机构8离开该施工平台,然后人们使升降机构7反向运转,使得移动板3与挡板5移回原位,同时攀爬机构8反向转回原位,然后人们使升降机构7与攀爬机构8停止运转。
34.升降机构7包括有固定脚71、第一电动推杆72、第一接触开关73和第二接触开关74,底板1左右两侧均设有固定脚71,固定脚71与围栏2连接,两个固定脚71上部内侧均设有第一电动推杆72,第一电动推杆72的伸缩杆与移动板3连接,围栏2前侧右部上侧设有第一接触开关73,围栏2前部右侧上部设有第二接触开关74。
35.人们将该施工平台上电后,按下第一接触开关73,进而使控制模块控制第一电动推杆72的伸缩杆伸长,进而使移动板3向上移动,待移动板3移至合适高度后,人们按下第二接触开关74,进而使控制模块控制第一电动推杆72的伸缩杆停止移动,使得移动板3停止移动,待施工结束后,人们再次按下第一接触开关73,进而使控制模块控制第一电动推杆72的伸缩杆缩短,使得移动板3向下移回原位,然后人们再次按下第二接触开关74,进而使控制模块控制第一电动推杆72停止工作,使得移动板3停止移动,如此达到了自动升降的目的,从而方便人们调节平台高度。
36.攀爬机构8包括有第一固定块81、安装环82、减速电机83、第一转轴84、梯子85、扶手86、安装板87和距离传感器88,移动板3前部左右两侧均设有第一固定块81,移动板3底侧前部右侧设有安装板87,安装板87前部设有安装环82,安装环82内侧安装有减速电机83,两块第一固定块81之间转动式连接有第一转轴84,第一转轴84与减速电机83的输出轴连接,第一转轴84上设有梯子85,梯子85与挡板5接触,梯子85左右两侧均设有扶手86,梯子85顶部设有距离传感器88。
37.当人们初次按下第一接触开关73时,控制模块会控制减速电机83的输出轴向前转动,继而使第一转轴84向前转动,使得梯子85向下转动,继而使扶手86和距离传感器88向下运动,待距离传感器88检测到其与地面的距离值达到了控制模块中的预设值时,控制模块会控制减速电机83的输出轴停止转动,使得梯子85停止转动,然后工作人员抓住扶手86,踩上梯子85,然后向上爬至承重机构9中,待施工结束后,人们再次按下第一接触开关73,进而使控制模块控制减速电机83的输出轴反向转动,使得梯子85和距离传感器88逐渐恢复原
位,待距离传感器88检测到其与挡板5之间的距离值达到了控制模块中的预设值时,控制模块会控制减速电机83停止工作,使得梯子85停止转动。
38.承重机构9包括有滑杆91、弹簧92、承重板93和压力传感器94,移动板3内部左右两侧均滑动式设有两根滑杆91,四根滑杆91顶部之间连接有承重板93,承重板93与移动板3滑动式连接,四根滑杆91上均绕有弹簧92,弹簧92连接在移动板3与承重板93之间,移动板3顶侧中部设有压力传感器94,压力传感器94与承重板93配合。
39.工作人员向上爬至承重板93顶部后,此时工作人员站在承重板93上,进而使承重板93向下移动,继而使滑杆91向下移动,弹簧92被压缩,承重板93对工作人员实现承重的目的,然后承重板93向下压住压力传感器94,压力传感器94对所受到的压力进行检测,待施工结束后,工作人员离开承重板93,弹簧92复位,使得滑杆91与承重板93移回原位。
40.实施例2在实施例1的基础之上,如图1
‑
3和图9
‑
13所示,还包括有移动机构10,移动机构10包括有第二电动推杆101、推动架102、第二转轴103和滚轮104,底板1中部内侧设有第二电动推杆101,第二电动推杆101的伸缩杆顶部设有推动架102,推动架102与底板1滑动式连接,推动架102底部左右两侧内部均转动式设有两根第二转轴103,四根第二转轴103上均设有滚轮104,滚轮104与底板1滑动式连接。
41.当人们需要移动该施工平台时,人们长按第一接触开关73三秒,进而使第二电动推杆101的伸缩杆缩短至最小值,使得推动架102向下移动,继而使第二转轴103向下移动,进而使滚轮104向下移动,直至与地面接触,此时底板1与地面分开,三秒后,控制模块控制第二电动推杆101的伸缩杆停止移动,使得滚轮104停止下移,随后人们推动推动架102,使得底板1移动,继而使滚轮104在地面上转动,从而使该施工平台移动,进而方便工作人员在不同位置进行施工,待该施工平台移至合适位置后,人们再次长按第一接触开关73三秒,进而使第二电动推杆101的伸缩杆伸长至原始值,使得滚轮104向上移回原位,三秒后,控制模块控制滚轮104停止移动,同时底板1与地面接触。
42.还包括有辅助机构11,辅助机构11包括有第二固定块111、第三转轴112、第一转杆113、第四转轴114、第二转杆115、第五转轴116和固定座117,底板1前后两侧均设有两块第二固定块111,四块第二固定块111内侧均转动式设有第三转轴112,四根第三转轴112上均设有第一转杆113,四根第一转杆113上部内侧均设有第四转轴114,移动板3前后两侧均设有四个固定座117,相邻的两个固定座117之间转动式连接有第五转轴116,第五转轴116的数量为四根,四根第五转轴116上均设有第二转杆115,第二转杆115与第四转轴114转动式连接。
43.移动板3上移会带动固定座117向上移动,进而使第五转轴116向上移动并转动,继而使第二转杆115转动,使得第一转杆113和第四转轴114向上运动,继而使第三转轴112转动,从而起到辅助支撑的作用,如此更加安全,待施工结束后,移动板3向下移回原位,使得第一转杆113与第二转杆115恢复原位。
44.还包括有保护机构12,保护机构12包括有安装座121、第三电动推杆122、推动杆123、固定环124和围挡125,移动板3底部左右两侧均设有安装座121,两个安装座121内侧均设有第三电动推杆122,两根第三电动推杆122的伸缩杆顶部均设有推动杆123,两根推动杆123前后两侧均设有固定环124,四个固定环124之间连接有围挡125,围挡125与移动板3滑
动式连接。
45.移动板3上下移动会带动安装座121移动,进而带动第三电动推杆122移动,使得推动杆123、固定环124和围挡125移动,当压力传感器94感受到的压力值达到了控制模块中的预设值时,控制模块会控制第三电动推杆122的伸缩杆伸长至最大值后停止运动,使得推动杆123和固定环124向上移动,继而使围挡125向上移动,然后围挡125停止移动,当工作人员施工时,围挡125能够防止施工人员从承重板93上掉落下来,较为安全,待施工结束后,人们长按第二接触开关74三秒,进而使控制模块控制第三电动推杆122的伸缩杆缩短至原始长度,使得围挡125移回原位。
46.如图1、图14和图15所示,还包括有控制箱6,围栏2前侧中部设有控制箱6,控制箱6内安装有开关电源、控制模块和电源模块,开关电源为桥梁施工用的安全施工平台供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;第一接触开关73和第二接触开关74均与控制模块通过电性连接,第一电动推杆72、第二电动推杆101和第三电动推杆122均与控制模块通过继电器控制模块连接,减速电机83与控制模块通过直流电机正反转模块连接。
47.以上结合具体实施例描述了本发明实施例的技术原理。这些描述只是为了解释本发明实施例的原理,而不能以任何方式解释为对本发明实施例保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明实施例的其它具体实施方式,这些方式都将落入本发明实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1