一种锥桶全自动收放装置及方法与流程
1.本发明属于道路施工安全附属设施领域,特别涉及一种锥桶全自动收放装置及方法。
背景技术:
2.锥桶是实施道路养护及交通管控重要的警示设施。截止2020年末,全国公路总养护里程已达514.40万公里,随着公路养护里程的不断增长,交通锥桶的收放作业量日益增加,而作业过程中的安全问题也日益突出。目前,在道路养护、管控中交通锥桶的收放主要依赖于人工,部分先进单位使用了半自动的锥桶收放机,但仍存在作业效率不高、危险性大、交通影响事件长、施放锥桶不够规范等问题,而这些问题在高速公路养护过程中尤为突出。因此,交通锥桶收放作业的自动化、智能化是实现道路管理高效经济、安全可靠的关键保障。
3.为此,有许多学者开发了一体式的交通锥桶自动收放车,如授权公告号为cn106320214b的中国发明专利“交通锥自动收放存储车”、申请公布号为cn110984021a的中国发明专利“一种交通锥筒全自动收放车”等。其都采用侧向抓取装置,以达到自动收放、自动储存效果。在储存模式上,前者采用纵向多层垛架,后者采用旋转仓结构,以提升空间利用率。但目前采用侧向收放方案的发明,普遍仅能实现直线段交通锥桶的回收和施放,不能适应曲线段作业和处理异常偏移锥桶。为了实现曲线段收放作业需求,申请公告号为cn111945610a的国发明专利“一种便于自动收放交通锥的摆放车”、采用六轴机器人进行摆放和回收,虽然便利性进一步增强,但是需要用到视觉识别等技术,在户外情况下可靠性不高。申请公告号为cn111827162a的国发明专利“一种交通锥桶全自动收放储存车及方法”、其采用尾部传送带装置进行摆放,侧面回收的方式,虽然解决了车辆后退问题,但是无法解决斜线段锥桶的回收。授权公告号为cn103469740的中国发明专利“交通锥全自动收放储存专用车”、申请公布号为cn109868769a的中国发明专利“一种具有左右拓宽功能的交通锥收放车”等,其采用了后置传送带抓取装置,可以灵活调整横向位置,以实现收放过程中根据交通锥桶的实际位置进行调整,但横向位置调整需要操作员或者驾驶者对准。
4.综上,目前侧向收放系统基本不能实现横向位置调整,而尾部收放系统需要人为对准回收,或通过视觉处理形式,可靠性不高。因此,当前设备在收放灵活性、安全可靠性方面还存在一些问题。同时,提高交通锥桶的收放速度和储存效率,以及提升便利性是当前需要面对的问题。
5.以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现要素:
6.本发明的目的在于提供一种锥桶全自动收放装置及方法,从而克服现有的锥桶自
动抓取装置在作业的过程中,灵活便利性差,可靠性低,收放效率以及锥桶存储率低的缺陷。
7.为实现上述目的,本发明提供了一种锥桶全自动收放装置,包括:行走装置,所述行走装置包括前端和后端,所述行走装置能够向所述前端和所述后端的方向进行移动;锥桶库,其设于所述行走装置上,所述锥桶库包括若干个锥桶库单元,所述锥桶库单元设有存储仓以及与所述存储仓相连通的仓口,所述仓口朝向所述后端,所述存储仓内设有隔板装置,所述隔板装置包括若干个间隔设于所述存储仓内的隔板以及传动组件,所述传动组件能够驱动所述隔板从所述仓口向所述存储仓内移动,所述锥桶库单元还设有第一动力源,所述第一动力源的输出端与所述传动组件相互连接并为其提供动力;回收引导装置,其包括回收架体,所述回收架体的一端与所述后端转动连接,所述回收架体上设有若干个待抓部,各所述待抓部沿所述行走装置的一侧向其另一侧并排设置,在所述待抓部与所述后端相互远离的一端设有引导部,所述引导部和所述待抓部之间设有通过口,在所述引导部远离所述待抓部的一端设有进料口,所述进料口的宽度大于所述通过口的宽度,在所述通过口处设有传感器,所述回收架体上还设有若干个与地面接触的滚轮,当所述回收架体的一端进行转动时,能够使所述引导部向所述后端靠近并使所述滚轮和地面相互分离;抓取装置,其设于所述锥桶库和所述回收引导装置之间,所述抓取装置包括机械臂和抓手装置,所述机械臂的一端与所述行走装置转动连接,所述机械臂的另一端能够从所述回收引导装置向所述锥桶库转动并能够屈伸,所述抓手装置包括第一转动座、第二转动座和活动指,所述第一转动座的一端与所述机械臂的另一端转动连接,所述第一转动座的另一端与所述第二转动座的一端转动连接,所述活动指共有两根并分别以可转动的方式设于所述第二转动座的另一端,两根所述活动指能够相互靠近或远离,所述第一转动座的两端的转动轴线相互垂直。
8.优选的,上述技术方案中,所述行走装置中设有行走轮组、动力系统以及控制器,所述动力系统能够驱动所述行走轮组进行转动以及为控制器提供电力。
9.优选的,上述技术方案中,所述锥桶库单元设有锥桶架,所述锥桶架固定设于所述行走装置上,所述存储仓开设在所述锥桶架上,所述仓口开设在所述锥桶架的一端。
10.优选的,上述技术方案中,所述传动组件还包括第一链轮组件,所述第一链轮组件共有两组,两组所述第一链轮组件分设于所述锥桶架的两侧,所述第一链轮组件包括相互配合的第一链轮和第一链条,所述隔板设于所述第一链条上,两组所述第一链轮组件上的所述隔板对称设置。
11.优选的,上述技术方案中,所述传动组件还包括第二链轮组件,所述第二链轮组件包括相互匹配的第二链轮和第二链条,所述第二链轮共有两个,其中一个所述第二链轮与任一组所述第一链轮组件中的所述第一链轮同轴连接,另一个所述第二链轮与所述第一动力源的输出端同轴连接。
12.优选的,上述技术方案中,所述传动组件还包括相互啮合的第一齿轮和第二齿轮,所述第一齿轮与所述第一动力源的输出端同轴连接,所述第二齿轮与另一组所述第一链轮组件中的所述第一链轮同轴连接。
13.优选的,上述技术方案中,所述回收引导装置还包括固定座,所述固定座的一端与所述后端固定连接,所述固定座的另一端从所述后端向外延伸并与所述回收架体的一端铰
接。
14.优选的,上述技术方案中,所述回收架体包括第一架体和第二架体,所述第一架体的一端与所述固定座的另一端铰接,所述第一架体的另一端与所述第二架体的一端铰接,所述第一架体的两端的铰轴相互平行,所述待抓部设于所述第一架体上,所述引导部设于所述第二架体上,所述通过口设于所述第二架体的一端,所述进料口设于所述第二架体的另一端,各所述进料口之间设有分边角,所述滚轮设于所述第二架体的另一端。
15.优选的,上述技术方案中,所述第二转动座的另一端设有固定指,所述固定指的中部设有圆弧形的卡口,两根所述活动指的一端分别与所述卡口的两侧转动连接,所述活动指的另一端能够向所述卡口处相互靠近,从而将锥桶抓持。
16.另一方面,为实现上述目的,本发明提供了一种锥桶全自动收放方法,通过如上所述的锥桶全自动收放装置进行实施,包括如下步骤:锥桶的摆放,首先将所述回收架体折叠,使所述行走装置向所述前端的方向行走,所述锥桶库通过所述隔板装置和所述驱动组件将锥桶逐个从所述仓口向外送出,所述抓取装置中的所述抓手装置成水平状态,在机械臂的驱动下将锥桶从所述仓口夹取,然后摆动至竖直状态,将锥桶放置在路面的指定位置上,当一个所述锥桶库单元中的锥桶被取完后,所述抓取装置再从另外的锥桶库单元中进行锥桶的取用;锥桶的回收,首先将所述回收架体打开,使所述行走装置向所述后端的方向行走,锥桶随机进入到进料口中通过引导部和通过口移动至待抓部中,该通过口上的传感器能够感知锥桶的进入,使所述抓取装置中的所述抓手装置成竖直状态,移动至该待抓部的上方将锥桶进行抓持,在机械臂的驱动下将锥桶摆动至水平状态并从所述仓口放入至所述锥桶库中,通过所述隔板装置和所述驱动组件将锥桶向存储仓内移动收置。
17.与现有的技术相比,本发明具有如下有益效果:1. 本发明中的锥桶全自动收放装置及方法通过锥桶库能够实现锥桶的水平叠加式存放并提升其存储量并且存储分离方便;通过带有机械臂和抓手装置的抓取装置,能够对锥桶实现高精度的摆放与回收入库,并且摆放范围广,能够实现车道宽度内的全覆盖摆放以及位置调整;通过回收引导装置能够将车道范围内的任意位置的锥桶自动引导至待抓部中,等待抓取装置对其进行精确抓取,其回收效率高,且结构简单可靠性高成本低,易于维护。
18.2. 本发明中的回收引导装置中的回收架体能够向行走装置的后端进行折叠,能够在锥桶的收放过程中方便使用以及姿态的转换。
19.3. 本发明中的锥桶库中的隔板装置有第一链轮组件和隔板组成,隔板能够卡在叠放的锥桶的外沿上,并且使各个锥桶进行水平方向的叠放,第一链轮组件不仅能够驱动隔板在存储仓内进行移动,而且还能够使对称侧的隔板在仓口处实现对向翻转,从而对锥桶进行逐个卡合和释放,在与抓取装置共同的配合下,实现了锥桶的上下料动作。
20.4. 本发明中的回收引导装置中的通过口处设置有传感器,当装置整体向后倒车时,位于车道内的锥桶能够被随机引导至任一处的待抓部内,当锥桶从通过口处通过时,能够触发传感器,从而能够使抓取装置对锥桶进行准确抓取。
21.5. 本发明中的回收引导装置的回收架体上设置有滚轮,当回收架体被打开时,滚轮能够与地面接触,并且使回收架体整体在水平的状态下随行走装置一同进行平移。
22.6. 本发明中的回收架体由可相互折叠的第一架体和第二架体组成,通过增加了折叠段数,能够使回收架体折叠后所占的空间更小。
23.7. 本发明中的抓取装置的转动座上设置有圆弧形的卡口,两根活动指分别安装在卡口的两侧,当两根活动指相互靠近时,其与卡口所形成的夹持区域的轮廓刚好能够与锥桶的外侧轮廓相互吻合,加大了贴合面积,从而使锥桶夹得更紧,降低了锥桶掉落的概率。
附图说明
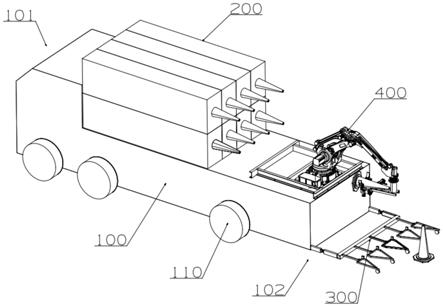
24.图1是实施例一中的锥桶全自动收放装置的结构图。
25.图2是实施例一中的锥桶库的结构图。
26.图3是实施例一中的回收引导装置的结构图。
27.图4是实施例一中的抓取装置的结构图。
28.主要附图标记说明:100-行走装置,101-前端,102-后端,110-行走轮组;200-锥桶库,210-锥桶库单元,211-存储仓,212-仓口,213-锥桶架,220-隔板装置,221-隔板,230-传动组件,231-第一链轮组件,232-第一链轮,233-第一链条,234-第二链轮组件,235-第二链轮,236-第二链条,237-第一齿轮,238-第二齿轮,240-第一动力源;300-回收引导装置,310-回收架体,311-第一架体,312-第二架体,320-待抓部,330-引导部,331-通过口,332-进料口,333-分边角,340-传感器,350-滚轮,360-固定座;400-抓取装置,410-机械臂,420-抓手装置,421-第一转动座,422-第二转动座,423-活动指,424-固定指,425-卡口。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”“上”、“下”、“前”、“后”“左”、“右”、“竖直”、“水平”、“顶”、“底”、“顶部”、“底部”、“顶面”、“底面”、“内”、“外”、“内侧”、“外侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
31.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到术语“第一”、“第二”、“第三”只是用于描述目的以及区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
32.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地
连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。下面根据本发明的整体结构,对其实施例进行说明。
33.实施例一:如图1到图4所示,该实施例中的锥桶全自动收放装置包括:行走装置100,前端101,后端102,行走轮组110,锥桶库200,锥桶库单元210,存储仓211,仓口212,锥桶架213,隔板装置220,隔板221,传动组件230,第一链轮组件231,第一链轮232,第一链条233,第二链轮组件234,第二链轮235,第二链条236,第一齿轮237,第二齿轮238,第一动力源240,回收引导装置300,回收架体310,第一架体311,第二架体312,待抓部320,引导部330,通过口331,进料口332,分边角333,传感器340,滚轮350,固定座360,抓取装置400,机械臂410,抓手装置420,第一转动座421,第二转动座422,活动指423,固定指424,卡口425。
34.行走装置100包括前端101和后端102,在行走装置100的底部安装有行走轮组110,在行走装置100的内部安装有控制器以及动力系统,其中动力系统由电机和动力电池组成,动力行走装置100能够向前端101和后端102的方向进行移动。
35.锥桶库200安装在行走装置100上,锥桶库200包括多个锥桶库单元210,各锥桶库单元210以矩形阵列的形式设置在行走装置100上,锥桶库单元210中设有锥桶架213,锥桶架213固定设于行走装置100上,在锥桶机阿213上开设有存储仓211,在锥桶架213的一端开设有仓口212,仓口212朝向后端102,在存储仓211内设有隔板装置220,隔板装置220由隔板221和传动组件230组成,传动组件包括第一链轮组件231和第二链轮组件234,第一链轮组件共有两组,两组第一链轮组件231分别安徽脏在锥桶架213的两侧,第一链轮组件231包括相互配合的第一链轮232和第一链条233,第一链条233位于存储仓211的两侧,隔板221沿着第一链条233间隔安装在第一链条233上,两组第一链轮组件231上的隔板221以存储仓211为中心对称设置,且第一链条233的一端与仓口212相平齐,当第一链条233转动时能够驱动隔板221从仓口212向存储仓211内移动或从仓口212向外移动,隔板221与第一链条233相互垂直;锥桶库单元210包括由驱动电机够的成的第一动力源240,第二链轮组件234包括相互匹配的第二链轮235和第二链条236,第二链轮235共有两个,其中一个第二链轮235与任意一组第一链轮组件231中的第一链轮232同轴连接,另一个第二链轮235与第一动力源240的输出端同轴连接;传动组件230还包括相互啮合的第一齿轮237和第二齿轮238,第一齿轮237与第一动力源240的输出端同轴连接,第二齿轮238与另一组第一链轮组件231中的第一链轮232同轴连接,当第一动力源240转动时,能够驱使第一链条233和第二链条236进行传动。
36.回收引导装置300包括回收架体310和固定座360,固定座360的一端与后端102固定连接,固定座360的另一端从后端102向行走装置100的后方垂直延伸;回收架体310包括第一架体311和第二架体312;第一架体311的一端与固定座360的另一端铰接,第一架体311的另一端与第二架体312的一端铰接,第一架体311的两端的铰轴相互平行并且同时并同时与行走装置100的行进方向相垂直,待抓部320设置在第一架体311上,其为矩形的方孔结构,引导部330设置第二架体312上,该引导部330为一个“v”字形的通道,在引导不330的两端分别设置有通过口331和进料口332,进料口332的宽度大于通过口331的宽度,通过口331开设在第二架体312靠近第一架体311的一端,进料口332设于第二架体312远离第一架体
311的一端,各进料口332之间设置有分边角333,在通过口331处安装有传感器340,在第二架体312的另一端还安装有多个与地面接触的滚轮350,当第二架体312和第一架体311进行折叠时,能够使引导部330向后端102靠近并使滚轮350和地面相互分离。
37.抓取装置400安装在锥桶库200和回收引导装置300之间,抓取装置400包括机械臂410和抓手装置420,机械臂410的一端与行走装置100转动连接,该转动轴线与行走装置100的行进方向相垂直,机械臂410的另一端能够从回收引导装置300向锥桶库200进行转动,并且机械臂410的两端能够屈伸;抓手装置420包括:第一转动座421、第二转动座422和活动指423,第一转动座421的一端与机械臂410的另一端转动连接,第一转动座422的另一端与第二转动座422的一端转动连接,第二转动座422的另一端设置有固定指424,固定指424的中部开设有圆弧形的卡口424,活动指423共有两根,两根活动指423的一端分别与卡口424的两侧转动连接,活动指423的本体为圆弧形结构,活动指423的另一端能够向卡口424处转动并相互靠近,从而形成以个圆弧形的夹持区域,用于将锥桶抓持,第一转动座421的两端的转动轴线相互垂直。
38.实施例二:该实施例公开了一种锥桶全自动收放方法,该方法通过在实施例一中的锥桶全自动收放装置上进行实施,该方法包括以下步骤:锥桶摆放过程,首先将回收架体310中的第一架体311和第二架体312折叠到后端102上,启动行走装置100,使其向前端101的方向行走,锥桶库200通过隔板装置220和驱动组件230的驱动,将锥桶逐个以水平姿态从仓口212向外送出,送出时其尖部朝外;抓取装置400中的抓手装置420成水平状态,在机械臂410的驱动下将锥桶从仓口212中夹取,然后摆动至竖直状态,将锥桶放置在路面的指定位置上,当一个锥桶单元210中的锥桶被取完后,抓取装置400再从另外的锥桶单元210中进行锥桶的取用;锥桶回收过程,首先将回收架体310中的第一架体311和第二架体312同时打开,使滚轮350与地面基础,启动行走装置100,使其向后端102的方向行走,在行走装置100的宽度范围内的锥桶随机进入到进料口332中,通过引导部330和通过口331被随机移动至任意待抓部320中,该待抓部320对应的通过口331上的传感器340能够感知锥桶的进入,控制器发出指令使抓取装置400中的抓手装置420成竖直状态,并将抓手装置420移动至该待抓部320的上方将锥桶进行抓持,在机械臂410的驱动下将锥桶摆动至水平状态并从仓口212放入至锥桶库200中,通过隔板装置220和驱动组件230将锥桶扣合并移向存储仓211内移动收置。
39.综上所述,本发明中的装置和方法通过锥桶库能够实现锥桶的水平叠加式存放并提升其存储量并且存储分离方便;通过带有机械臂和抓手装置的抓取装置,能够对锥桶实现高精度的摆放与回收入库,并且摆放范围广,能够实现车道宽度内的全覆盖摆放以及位置调整;通过回收引导装置能够将车道范围内的任意位置的锥桶自动引导至待抓部中,等待抓取装置对其进行精确抓取,其回收效率高,且结构简单可靠性高成本低,易于维护。
40.前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的,这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化,尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,对示例性实施例进行选择和描述的目的在于解释本发明的
特定原理及其实际应用,从而使得本领域的技术人员能够在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换、变型以及各种不同的选择和改变,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1