一种适应多尺寸跳台的滑雪跳台曲面修整机器人
1.本发明涉及冰雪运动场地建设技术领域,特别涉及一种适应多尺寸跳台的滑雪跳台曲面修整机器人。
背景技术:
2.运动员在参与自由式滑雪空中技巧,单板滑雪u型场地技巧等项目的比赛和训练时,滑雪跳台曲面质量的好坏影响着运动员的起跳高度和出台速度,进而影响运动员的比赛成绩。传统的滑雪跳台曲面建设采用人工修整的方式,跳台曲面修整效率低,修整之后的跳台曲面一致性差,尤其训练过程中的人工修整过程压缩了运动员的训练时间。
技术实现要素:
3.针对现有技术的问题和不足,本发明目的在于提供一种适应多尺寸跳台的滑雪跳台曲面修整机器人,以解决现有人工修整效率低、曲面一致性差的问题,实现滑雪跳台曲面的高效、自动化修整。
4.为了实现上述目的,本发明采用以下技术方案:
5.一种适应多尺寸跳台的滑雪跳台曲面修整机器人,包括移动平台、机械臂可调基座、机械臂及跳台曲面修整工具,其中机械臂可调基座设置于移动平台上,机械臂设置于机械臂可调基座上,跳台曲面修整工具设置于机械臂的执行末端。
6.所述机械臂可调基座包括可调基座安装板、活动支架、机械臂安装板、主直线驱动模块及辅助直线驱动模块,其中可调基座安装板与所述移动平台连接,活动支架的下端与可调基座安装板的一端铰接,机械臂安装板的一端与活动支架的上端铰接;主直线驱动模块和辅助直线驱动模块均铰接在可调基座安装板的另一端,主直线驱动模块的输出端与机械臂安装板的另一端铰接,辅助直线驱动模块的输出端与活动支架铰接。
7.所述辅助直线驱动模块包括平行设置的辅助直线驱动模块ⅰ和辅助直线驱动模块ⅱ,辅助直线驱动模块ⅰ和辅助直线驱动模块ⅱ分别位于所述主直线驱动模块的两侧。
8.所述跳台曲面修整工具包括修整刀具、工具支架、旋转驱动装置、传动装置、雪屑抛出箱及抛雪叶片,其中工具支架与所述机械臂的执行末端连接,修整刀具可转动地安装在工具支架的下部;雪屑抛出箱设置于工具支架的上部,抛雪叶片通过两端的叶片轴可转动地设置于雪屑抛出箱内,且抛雪叶片与修整刀具平行设置;
9.旋转驱动装置和传动装置分别设置于工具支架的两端,旋转驱动装置与修整刀具的输入端连接,用于驱动修整刀具转动;传动装置用于连接修整刀具的输出端与抛雪叶片的叶片轴。
10.所述旋转驱动装置包括驱动电机、电机端同步带轮、电机端同步带及刀具驱动同步带轮,其中驱动电机设置于所述工具支架上,驱动电机的输出端与电机端同步带轮连接,刀具驱动同步带轮设置于所述修整刀具的输入端,刀具驱动同步带轮通过电机端同步带与电机端同步带轮连接。
11.所述传动装置包括被动同步带轮、被动同步带及叶片驱动同步带轮,其中被动同步带轮设置于所述修整刀具的输出端,叶片驱动同步带轮设置于所述抛雪叶片的叶片轴上,叶片驱动同步带轮通过被动同步带与被动同步带轮连接。
12.所述雪屑抛出箱设置于所述修整刀具的正上方,所述雪屑抛出箱的底部设有进雪口,所述雪屑抛出箱的顶部设有排雪口。
13.所述移动平台上还设有视觉定位系统和通讯控制系统。
14.所述移动平台采用三角履带轮作为行走单元。
15.本发明具有以下有益效果及优点:
16.1.本发明采用三角履带轮作为行走单元,可以更好地适应冰雪运动比赛场地地形。
17.2.本发明采用机械臂作为跳台曲面修整工具的支撑结构,整个修整过程作业精度高,修整作业过的跳台曲面一致性好。
18.3.本发明中的机械臂可调基座结构,可以通过直线驱动模块的直线运动改变机械臂的基座位置,采用这种方式可以在不更换机械臂的情况下修整不同尺寸的滑雪跳台曲面。
19.4.本发明的跳台曲面修整工具通过一套驱动系统可以同时驱动修整刀具和雪屑抛出叶片,跳台曲面修整效率高,控制简单。
附图说明
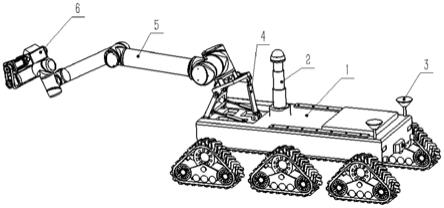
20.图1是本发明一种适应多尺寸跳台的滑雪跳台曲面修整机器人的结构示意图;
21.图2是本发明中的机械臂可调基座的结构示意图;
22.图3是本发明中的跳台曲面修整工具的结构示意图;
23.图4是本发明的工作示意图;
24.图中:1为移动平台,2为视觉定位系统,3为通讯控制系统,4为机械臂可调基座,5为机械臂,6为跳台曲面修整工具,7为滑雪跳台,401为可调基座安装板,402为活动支架,403为机械臂安装板,404为主直线驱动模块,405为辅助直线驱动模块ⅰ,406为辅助直线驱动模块ⅱ,601为修整刀具,602为工具支架,603为驱动电机,604为电机端同步带轮,605为电机端同步带,606为刀具驱动同步带轮,607为被动同步带轮,608为被动同步带,609为叶片驱动同步带轮,610为雪屑抛出箱,611为抛雪叶片。
具体实施方式
25.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
26.如图1所示,本发明提供的一种适应多尺寸跳台的滑雪跳台曲面修整机器人,包括移动平台1、机械臂可调基座4、机械臂5及跳台曲面修整工具6,其中机械臂可调基座4设置于移动平台1上,机械臂5设置于机械臂可调基座4上,跳台曲面修整工具6设置于机械臂5的执行末端。
27.如图2所示,本发明的实施例中,机械臂可调基座4包括可调基座安装板401、活动支架402、机械臂安装板403、主直线驱动模块404及辅助直线驱动模块,其中可调基座安装
板401与移动平台1连接,活动支架402的下端与可调基座安装板401的一端铰接,机械臂安装板403的一端与活动支架402的上端铰接;主直线驱动模块404和辅助直线驱动模块均铰接在可调基座安装板401的另一端,主直线驱动模块404的输出端与机械臂安装板403的另一端铰接,辅助直线驱动模块的输出端与活动支架402铰接。
28.具体地,辅助直线驱动模块包括平行设置的辅助直线驱动模块ⅰ405和辅助直线驱动模块ⅱ406,辅助直线驱动模块ⅰ405和辅助直线驱动模块ⅱ406分别位于主直线驱动模块404的两侧。
29.具体地,活动支架402通过销与可调基座安装板401上的铰接座ⅰ连接,可调基座安装板401另一端设有三个铰接座ⅱ,三个铰接座ⅱ通过销分别与辅助直线驱动模块ⅰ405、主直线驱动模块404和辅助直线驱动模块ⅱ406连接,辅助直线驱动模块ⅰ405、主直线驱动模块404和辅助直线驱动模块ⅱ406固定端可绕销转动。其中活动支架402上等高度设有两个中间耳座,两个中间耳座分别与辅助直线驱动模块ⅰ405和辅助直线驱动模块ⅱ406的输出端铰接。辅助直线驱动模块ⅰ405和辅助直线驱动模块ⅱ406可驱动活动支架402绕下端的销轴转动。机械臂安装板403的底部两端分别设有两个耳座,两个耳座分别与活动支架402的上端和主直线驱动模块404的输出端铰接,主直线驱动模块404可驱动机械臂安装板403绕机械臂安装板403和活动支架402之间的销轴转动。工作时,通过调整主直线驱动模块404和辅助直线驱动模块的长度,实现机械臂可调基座4不同位置的调节,进而调整机械臂5的工作空间,来适应修整不同尺寸的滑雪跳台。
30.如图3所示,本发明的实施例中,跳台曲面修整工具6包括修整刀具601、工具支架602、旋转驱动装置、传动装置、雪屑抛出箱610及抛雪叶片611,其中工具支架602与机械臂5的执行末端连接,修整刀具601可转动地安装在工具支架602的下部;雪屑抛出箱610设置于工具支架602的上部,抛雪叶片611通过两端的叶片轴可转动地设置于雪屑抛出箱610内,且抛雪叶片611与修整刀具601平行设置;旋转驱动装置和传动装置分别设置于工具支架602的两端,旋转驱动装置与修整刀具601的输入端连接,用于驱动修整刀具601转动;传动装置用于连接修整刀具601的输出端与抛雪叶片611的叶片轴。
31.具体地,旋转驱动装置包括驱动电机603、电机端同步带轮604、电机端同步带605及刀具驱动同步带轮606,其中驱动电机603设置于工具支架602上,驱动电机603的输出端与电机端同步带轮604连接,刀具驱动同步带轮606设置于修整刀具601的输入端,刀具驱动同步带轮606通过电机端同步带605与电机端同步带轮604连接。
32.具体地,传动装置包括被动同步带轮607、被动同步带608及叶片驱动同步带轮609,其中被动同步带轮607设置于修整刀具601的输出端,叶片驱动同步带轮609设置于抛雪叶片611的叶片轴上,叶片驱动同步带轮609通过被动同步带608与被动同步带轮607连接。具体地,抛雪叶片611为多片式螺旋叶片结构。
33.进一步地,雪屑抛出箱610设置于修整刀具601的正上方,雪屑抛出箱610的底部设有进雪口,雪屑抛出箱610的顶部设有排雪口,为雪屑抛出提供通道。抛雪叶片611可通过叶片轴旋转将修整之后的雪屑抛出,防止雪屑堵塞。
34.工作时,驱动电机603通过电机端同步带605驱动修整刀具601旋转,修整刀具601的输出端通过被动同步带608驱动抛雪叶片611旋转,抛雪叶片611通过旋转可将修整剩余的雪屑通过雪屑抛出箱610的顶部抛出,避免雪屑堆积影响修整刀具601的工作。
35.本发明的实施例中,移动平台1采用三角履带轮作为行走单元,可以更好地适应冰雪运动比赛场地地形。具体地,移动平台1的底盘使用不少于四个三角履带轮。本实施例中,机械臂5采用现有技术中的六自由度机械臂。
36.在上述实施例的基础上,进一步地,移动平台1上还设有视觉定位系统2和通讯控制系统3,视觉定位系统2用于定位跳台的位置及检测跳台表面的状态,通讯控制系统3用于控制机械臂5动作。具体地,视觉定位系统包含相机和电动可升降桅杆,相机设置于电动可升降桅杆上,电动可升降桅杆可以调节相机的高低,适应不同尺寸滑雪跳台的识别和定位。
37.如图4所示,工作时,机械臂可调基座4可通过主直线驱动模块404和辅助直线驱动模块调节机械臂5底座的位置,从而拓展机械臂5的工作空间,适应不同尺寸的滑雪跳台7的修整作业。对于大尺寸的滑雪跳台7的修整,首先通过视觉定位系统2定位跳台的位置及检测跳台表面的状态,之后通过通讯控制系统3控制移动平台1沿滑雪跳台7的坡面向上行驶,由修整工具6先完成滑雪跳台7的起跳点处大角度坡面的修整作业之后,再通过通讯控制系统3控制移动平台1沿滑雪跳台7的坡面向下行驶,由机械臂5和跳台曲面修整工具6完成大尺寸跳台、小角度坡面的修整。
38.本发明可适应不同尺寸、类型滑雪跳台的跳台曲面修整,实现曲面修整工具可调,使曲面修整工具与冰雪地形适应,完成不同尺寸滑雪跳台曲面的高效、自动化修整,解决现有人工修整效率低、曲面一致性差的问题。
39.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1