一种具有防砸功能的车辆道闸控制方法与流程
1.本发明属于道闸控制技术领域,特别涉及一种具有防砸功能的车辆道闸控制方法。
背景技术:
2.道闸又称挡车器,是专门用于道路上限制机动车行驶的通道出入口管理设备,现广泛应用于公路收费站、停车场系统管理车辆通道,用于管理车辆的出入,道闸都具有固定的升降行程或者手动控制,在使用的过程中,道闸上升过高会造成电能浪费,在车辆经过道闸的过程中,如果道闸复位则会造成车辆被砸,安全性较低,但是,现有的具有防砸功能的车辆道闸控制方法不能够解决上述问题,为此,本发明提出一种具有防砸功能的车辆道闸控制方法。
技术实现要素:
3.为了解决现有技术存在的问题,本发明提供了一种具有防砸功能的车辆道闸控制方法,该具有防砸功能的车辆道闸控制方法设计合理,根据车辆的数据和行驶轨迹计算道闸的最高碰触点,根据最高碰触点计算道闸的中间安全角度,在车辆经过道闸的过程中,将中间安全角度设置为道闸的行程最低角度,然后对道闸的行程进行规划,通过改变道闸的行程最低角度限制道闸栏杆的最低下降角度,从而达到防砸的目的,提高道闸使用的安全性。
4.为了实现上述目的,本发明是通过如下的技术方案来实现:一种具有防砸功能的车辆道闸控制方法,具体步骤如下:
5.步骤一:车辆识别;车辆到达道闸一定范围内后,道闸的识别机构对车辆进行识别,并获取车辆影像;
6.步骤二:车辆数据计算;预测车辆到达道闸时的行驶轨迹,根据车辆的影像计算出车辆的数据,根据车辆的数据和行驶轨迹计算道闸的最高碰触点;
7.步骤三:道闸行程规划;根据最高碰触点计算道闸的中间安全角度,在车辆经过道闸的过程中,将中间安全角度设置为道闸的行程最低角度,从而防止碰撞,将中间安全角度向上调30
°
作为道闸的行程最高角度,防止电能浪费;
8.步骤四:执行控制;车辆到达道闸前,控制道闸栏杆提前升至行程最高角度,道闸的识别机构继续对车辆进行监测;
9.步骤五:道闸复位;车辆安全通过后,将行程最低角度恢复为初始行程最低角度,然后控制道闸复位至此角度。
10.作为本发明的一种优选实施方式,所述步骤二中,在进行车辆数据计算时,需要进行车顶异物识别,识别到异物时,最高碰触点的计算增加异物的高度。
11.作为本发明的一种优选实施方式,所述步骤二中,车辆基本信息为车型、高度和宽度。
12.作为本发明的一种优选实施方式,所述步骤三中,当中间安全角度距离垂直角度不足30
°
时,设置垂直角度为栏杆行程的最大角度。
13.作为本发明的一种优选实施方式,所述步骤五中,初始行程最低角度为水平角度。
14.本发明的有益效果:本发明的一种具有防砸功能的车辆道闸控制方法,包括车辆识别、车辆数据计算、道闸行程规划、执行控制和道闸复位。
15.1、此具有防砸功能的车辆道闸控制方法根据车辆的数据和行驶轨迹计算道闸的最高碰触点,根据最高碰触点计算道闸的中间安全角度,在车辆经过道闸的过程中,将中间安全角度设置为道闸的行程最低角度,然后对道闸的行程进行规划,通过改变道闸的行程最低角度限制道闸栏杆的最低下降角度,从而达到防砸的目的,提高道闸使用的安全性。
16.2、此具有防砸功能的车辆道闸控制方法针对性根据车辆的数据计算处中间安全角度后,再向上调30
°
作为道闸的行程最高角度,在保证车辆能够通过的情况下,能够防止道闸栏杆上升过高而电能浪费,环保节约。
17.3、此具有防砸功能的车辆道闸控制方法对车辆的适应性强,针对不同的车辆均能够实现防砸和节能。
附图说明
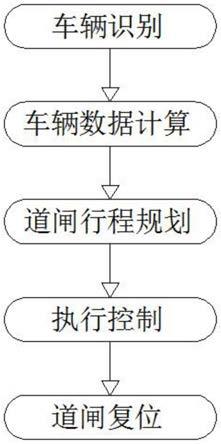
18.图1为一种具有防砸功能的车辆道闸控制方法的流程示意图。
具体实施方式
19.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
20.请参阅图1,本发明提供一种技术方案:一种具有防砸功能的车辆道闸控制方法,具体步骤如下:
21.步骤一:车辆识别;车辆到达道闸一定范围内后,道闸的识别机构对车辆进行识别,并获取车辆影像;
22.步骤二:车辆数据计算;预测车辆到达道闸时的行驶轨迹,根据车辆的影像计算出车辆的数据,根据车辆的数据和行驶轨迹计算道闸的最高碰触点;
23.步骤三:道闸行程规划;根据最高碰触点计算道闸的中间安全角度,在车辆经过道闸的过程中,将中间安全角度设置为道闸的行程最低角度,从而防止碰撞,将中间安全角度向上调30
°
作为道闸的行程最高角度,防止电能浪费;
24.步骤四:执行控制;车辆到达道闸前,控制道闸栏杆提前升至行程最高角度,道闸的识别机构继续对车辆进行监测;
25.步骤五:道闸复位;车辆安全通过后,将行程最低角度恢复为初始行程最低角度,然后控制道闸复位至此角度。
26.作为本发明的一种优选实施方式,所述步骤二中,在进行车辆数据计算时,需要进行车顶异物识别,识别到异物时,最高碰触点的计算增加异物的高度。
27.作为本发明的一种优选实施方式,所述步骤二中,车辆基本信息为车型、高度和宽度。
28.作为本发明的一种优选实施方式,所述步骤三中,当中间安全角度距离垂直角度
不足30
°
时,设置垂直角度为栏杆行程的最大角度。
29.作为本发明的一种优选实施方式,所述步骤五中,初始行程最低角度为水平角度。
30.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
31.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
技术特征:
1.一种具有防砸功能的车辆道闸控制方法,其特征在于,具体步骤如下:步骤一:车辆识别;车辆到达道闸一定范围内后,道闸的识别机构对车辆进行识别,并获取车辆影像;步骤二:车辆数据计算;预测车辆到达道闸时的行驶轨迹,根据车辆的影像计算出车辆的数据,根据车辆的数据和行驶轨迹计算道闸的最高碰触点;步骤三:道闸行程规划;根据最高碰触点计算道闸的中间安全角度,在车辆经过道闸的过程中,将中间安全角度设置为道闸的行程最低角度,从而防止碰撞,将中间安全角度向上调30
°
作为道闸的行程最高角度,防止电能浪费;步骤四:执行控制;车辆到达道闸前,控制道闸栏杆提前升至行程最高角度,道闸的识别机构继续对车辆进行监测;步骤五:道闸复位;车辆安全通过后,将行程最低角度恢复为初始行程最低角度,然后控制道闸复位至此角度。2.根据权利要求1所述的一种具有防砸功能的车辆道闸控制方法,其特征在于:所述步骤二中,在进行车辆数据计算时,需要进行车顶异物识别,识别到异物时,最高碰触点的计算增加异物的高度。3.根据权利要求1所述的一种具有防砸功能的车辆道闸控制方法,其特征在于:所述步骤二中,车辆基本信息为车型、高度和宽度。4.根据权利要求1所述的一种具有防砸功能的车辆道闸控制方法,其特征在于:所述步骤三中,当中间安全角度距离垂直角度不足30
°
时,设置垂直角度为栏杆行程的最大角度。5.根据权利要求1所述的一种具有防砸功能的车辆道闸控制方法,其特征在于:所述步骤五中,初始行程最低角度为水平角度。
技术总结
本发明提供一种具有防砸功能的车辆道闸控制方法,步骤如下:车辆识别,车辆数据计算,道闸行程规划,执行控制,道闸复位,该具有防砸功能的车辆道闸控制方法设计合理,根据车辆的数据和行驶轨迹计算道闸的最高碰触点,根据最高碰触点计算道闸的中间安全角度,在车辆经过道闸的过程中,将中间安全角度设置为道闸的行程最低角度,然后对道闸的行程进行规划,通过改变道闸的行程最低角度限制道闸栏杆的最低下降角度,从而达到防砸的目的,提高道闸使用的安全性。的安全性。的安全性。
技术研发人员:陈元周
受保护的技术使用者:湖北利达金龙科技有限公司
技术研发日:2021.12.23
技术公布日:2022/3/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1