一种市政工程用道路修补装置的制作方法
1.本实用新型属于道路修复技术领域,尤其是涉及一种市政工程用道路修补装置。
背景技术:
2.市政工程是指在城市区、镇(乡)规划建设范围内设置、基于政府责任和义务为居民提供有偿或无偿公共产品和服务的各种建筑物、构筑物、设备等都属于市政工程范畴,道路建设属于市政工程中最重要的一环,水泥路面在使用一段时间后,表面承受压力过大后,表面变得坑坑洼洼,需要定期进行修补,修补时,首先画出修补轮廓线,使用马路切割机切割至水稳层,将切割出来的路面进行清理,然后浇筑砼,最后进行养护,浇筑砼时,一般选用商砼,需要一次性浇筑完成,中间不能间歇,需要严格控制商砼的塌落度,禁止在现场加水提高塌落度,浇筑完成后要及时进行振捣,保证混凝土密实,严格的控制振捣时间,移动距离和插入深度,严防漏振及过振。
技术实现要素:
3.根据以上现有技术中的不足,本实用新型要解决的技术问题是:提供一种市政工程用道路修补装置,其结构简单,能有效的控制振捣器对混凝土进行振捣。
4.所述的市政工程用道路修补装置,包括箱体,箱体底部竖直设置有能调整箱体高度的伸缩组件,伸缩组件底部设置移动组件,箱体内竖直安装有隔板,隔板将箱体分为搅拌室和安装室,所述搅拌室内竖直设置有转轴,转轴的两端分别通过轴承对应安装在搅拌室内部,转轴的顶端穿出搅拌室连接有动力机构,转轴上环绕有搅拌叶片,搅拌叶片呈单螺旋结构,搅拌室顶部开设有进料口,搅拌室底部安装有出料管;
5.安装室内水平设置有固定杆,固定杆上套有与之呈左右滑动配合的滑块,滑块底部安装有安装块,安装块内设置有振捣器,对应振捣器在安装室底部开设有上下相通的通槽,通槽的长度方向与固定杆的长度方向一致,振捣器的震动管工作端穿出通槽设置在箱体底部。
6.进一步的,所述滑块顶部安装有第一距离传感器,安装块侧壁上安装有计时器,安装室底部安装有第二距离传感器,箱体前侧安装有显示屏和控制器,第二距离传感器与控制器电连接,控制器控制第二距离传感器采集距离信号,第一距离传感器与控制器电连接,控制器控制第一距离传感器采集距离信号,显示屏与控制器电连接,控制器控制显示屏显示计时器的数字信号。
7.进一步的,所述伸缩组件包括第一固定块,第一固定块底部竖直开设有滑槽,滑槽内设置有沿槽深方向上下滑动的滑杆。
8.进一步的,所述震动管的工作端穿出箱体的长度为60cm-70cm。
9.进一步的,所述固定杆的两端通过第二固定块安装在对应安装室的内侧壁上。
10.与现有技术相比,本实用新型具有以下有益效果:
11.本实用新型中,混凝土在搅拌室内完成制备,对路面进行浇筑,在震动管的作用下
将混凝土振捣,使混凝土密实,调整伸缩组件可以调整震动管插入混凝土的深度,使震动管在竖直(z轴)方向移动,调整固定杆和滑块的滑动可以调整震动管,使震动管在左右水平(x轴)移动,调整移动组件使箱体前后运动,控制震动管在前后水平(y轴)移动。
附图说明
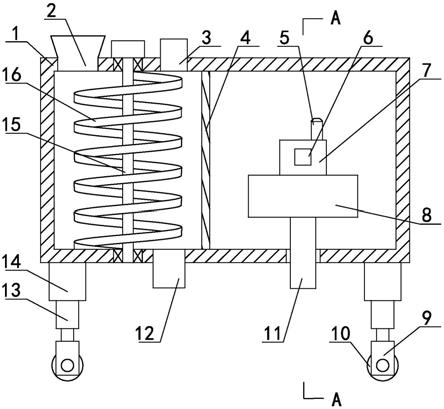
12.图1为本实用新型结构示意图;
13.图2为图1中a-a处的剖视图;
14.图3为图1的前视示意图;
15.图4为实施例5的结构示意图
16.图中各部件名称:1、箱体 2、进料口 3、注水口 4、隔板 5、第一距离传感器 6、固定杆 7、滑块 8、安装块 9、支架 10、轮 11、震动管 12、出料管 13、滑杆 14、第一固定块 15、转轴 16、搅拌叶片 17、计时器 18、第二距离传感器 19、振捣器 20、第二固定块 21、显示屏 22、控制器。
具体实施方式
17.以下结合附图通过具体实施例对本实用新型作进一步说明,但不用以限制本实用新型,凡在本实用新型精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
18.实施例1
19.本实施例所述的市政工程用道路修补装置,包括箱体1,箱体1底部竖直设置有能调整箱体1高度的伸缩组件,伸缩组件底部设置移动组件,箱体1内竖直安装有隔板4,隔板4将箱体1分为搅拌室和安装室,所述搅拌室内竖直设置有转轴15,转轴15的两端分别通过轴承对应安装在搅拌室内部,转轴15的顶端穿出搅拌室连接有动力机构,转轴15上环绕有搅拌叶片16,搅拌叶片16呈单螺旋结构,搅拌室顶部开设有进料口2,搅拌室底部安装有出料管12;
20.安装室内水平设置有固定杆6,固定杆6上套有与之呈左右滑动配合的滑块7,滑块7底部安装有安装块8,安装块8内设置有振捣器19,对应振捣器19在安装室底部开设有上下相通的通槽,通槽的长度方向与固定杆6的长度方向一致,振捣器19的震动管11工作端穿出通槽设置在箱体1底部。
21.本实施例具有的技术效果为:
22.如图1、图2和图3所示,本实施例中,通过转轴15和搅拌叶片16将物料混合搅拌,打开开关,混凝土从出料管12排出浇筑路面,通过震动管11对混凝土振捣,使混凝土密实,通过伸缩组件调整震动管11插入混凝土的深度,使震动管11在竖直(z轴)方向移动,通过固定杆6和滑块7的左右滑动配合调整震动管11,使震动管11在左右水平(x轴)方向移动,通过移动组件前后运动,控制震动管11在前后水平(y轴)方向移动。
23.本实施例使用时,将水泥等物料从进料口2添加,打开动力机构,使转轴15旋转,带动搅拌叶片16旋转,将物料混合搅拌,混合完成后将混凝土从出料管12排出,推动箱体1对路面进行浇筑,完成浇筑后推动箱体1,将箱体1移动到指定位置后,调整伸缩组件将震动管11底部插入混凝土中,达到时间后调整伸缩组件将震动管11拔出混凝土,完成一次振捣,移
动滑块7,将震动管11沿左右水平(x轴)移动后将震动管11再次插入混凝土中振捣,重复多次后,沿左右水平(x轴)方向的振捣完成后,再次移动移动组件,使震动管11沿前后水平(y轴)方向移动,再次重复沿左右水平(x轴)方向的振捣,循环多次后完成沿前后水平(y轴)方向的振捣。
24.本实施例中振捣器19为现有技术,振捣器19分为内部振捣器、外部振捣器和表面振捣器三种,混凝土振捣器工作时,使混凝土内部颗粒之间的内摩擦力和粘着力急剧减小,混凝土呈重质液体状态。骨料相互滑动并重新排列,骨料之间的空隙被砂浆填充,气泡被挤出,从而达到捣实的效果,振捣器有偏心式和行星式两种。偏心式利用振动棒中心安装的具有偏心质量的转轴,在高速旋转时产生的离心力通过轴承传递给振动棒壳体,从而使振动棒产生圆周振动的。行星式是利用振动棒中一端空悬的转轴,在它旋转时,其下垂端的圆锥部分沿棒壳内的圆锥面滚动,从而形成滚动体的行星运动以驱动棒体产生圆周振动。
25.本实施例中转轴15的两端通过轴承安装在搅拌室内部具体为,转轴15的下端通过轴承安装在搅拌室底部,转轴15的上端通过轴承安装在搅拌室顶部。
26.本实施例中在搅拌室顶部开设有注水口3,从注水口3中添加水,可以避免水和水泥同时在进料口2中添加,会导致湿润的水泥附着在进料口2的表面,增加原材料的同时附着在进料口2的水泥还难以清洗。
27.本实施例中,震动管11在每一个振捣位置的时间不易过长和过短,过短会导致混凝土振捣不密实,影响公路路面的质量,达不到施工要求,还会影响市民的行车安全,过长混凝土会产生离析现象,出现砂与水泥浆分离,石子下沉,并在混凝土表面形成砂层,影响混凝土质量,达不到施工要求,在实际运用中,根据路面宽度、混凝土的厚度和混凝土的塌落度来确定震动管11每次插入混凝土振捣的时间,每次震动管11插入混凝土振捣的时间为20s-30s,确定的振捣时间必须振动到该部位混凝土停止下陷,不在冒出气泡,表面呈现平坦和乏浆,同时还不能出现离析现象。
28.本实施例中,震动管11前后两次插入混凝土的间距不易过长和过短,间距过长会产生局部漏振,影响公路路面的整体效果和承重能力,间距过短时会在同一个位置两次振捣,变相增加了单次振捣的时间,出现砂与水泥浆分离,石子下沉,并在混凝土表面形成砂层,影响混凝土质量。
29.在实际运用时,要根据混凝土的浇筑厚度和混凝土的塌落度来确定震动管11前后两次插入混凝土的间距长度,间距长度可以为30cm-50cm,确定的间距需要满足避免同一位置两次振捣,避免局部漏振。
30.本实施例中动力机构采用普通电机,电机的输出轴连接在转轴15的顶端,通过电机转动带动转轴15转动,也可以采用柴油发动机,柴油发动机的输出端与转轴15的顶端连接。
31.本实施例中移动组件包括支架9,支架9上设置有轮10,轮10通过转轴安装在支架9上,还可以采用带自锁功能的万向轮,方便工作人员在移动过程中旋转方向。
32.实施例2
33.本实施例将技术进一步进行说明,所述滑块7顶部安装有第一距离传感器5,安装块8侧壁上安装有计时器17,安装室底部安装有第二距离传感器18,箱体1前侧安装有显示屏21和控制器22,第二距离传感器18与控制器22电连接,控制器22控制第二距离传感器18
采集距离信号,第一距离传感器5与控制器22电连接,控制器22控制第一距离传感器5采集距离信号,显示屏21与控制器22电连接,控制器22控制显示屏21显示计时器17的数字信号。
34.本实施例具有的技术效果为:
35.如图1、图2和图3所示,本实施例结构简单,能控制震动管11插入混凝土的深度,震动管11插入混凝土的时间,每次沿左右水平(x轴)移动震动管11的距离。
36.在实际运用时,第一距离传感器5采集第一距离传感器5至安装室内侧壁的距离信号确定滑块7的位置,第二距离传感器18采集第二距离传感器18至地面的距离信号确定震动管11工作端的下降位置,计时器17统计震动管11每次下降的时间在显示屏21上显示,还未工作时,工作人员将滑块7调整到固定杆6左端时,在控制器22上将第一距离传感器5至安装室内侧壁的距离信号归零,将伸缩组件的高度确定后,将第二距离传感器18至地面的距离信号归零,然后将计时器17归零,工作时,调整伸缩组件的高度,使震动管11底部插入混凝土中,第二距离传感器18将距离信号传送给控制器22,与归零的信号对比,达到对应的深度后,伸缩组件停止收缩,计时器17开始计时,达到对应的时间后,伸缩组件伸展,将震动管11的工作端拔出混凝土中,滑块7向右移动,第一距离传感器5将距离信号传送给控制器22,与归零的距离对比,达到对应距离后后,滑块7停止移动,再次振捣,沿左右水平(x轴)的振捣全部完成后,工作人员推动箱体1沿前后水平(y轴)运动,到达下一个左右水平(x轴)位置后,再次重复振捣工作,直到完成整个振捣工作。
37.实施例3
38.本实施例将技术进一步进行说明,所述伸缩组件包括第一固定块14,第一固定块14底部竖直开设有滑槽,滑槽内设置有沿槽深方向上下滑动的滑杆13。
39.本实施例具有的技术效果为:
40.如图1、图2和图3所示,本实施例结构简单,能快速调整箱体1的离地高度,调整震动管11工作端插入混凝土的深度。
41.本实施例中在第一固定块14上开设有螺纹孔,螺纹孔内设置有与之呈螺纹配合的螺钉,螺钉穿过螺纹孔顶紧滑杆13,使用时,调整好滑杆13的高度后,通过拧紧螺栓,就会使第一固定块14与滑杆13紧密贴合,从而达到将第一固定块14与滑杆13固定的目的,还可以采用定位销,第一固定块14上开设有用于定位销穿过的通孔,滑杆13从上至下等间距开设有用于定位销穿过的通孔,使用时,定位销穿过开设在第一固定块14上的通孔和开设在滑杆13上的通孔,将第一固定块14和滑杆13固定。
42.本实施例中伸缩组件采用电动推杆:电动推杆为现有技术,是一种将电动机的旋转运动转变为推杆的直线往复运动的电力驱动装置,由驱动电机、减速齿轮、螺杆、螺母、导套、推杆、滑座、弹簧、外壳及涡轮、微动控制开关等组成,其工作原理是电动机经齿轮或蜗轮蜗杆减速后,带动一对丝杆螺母,把电机的旋转运动变成直线运动,利用电动机正反转完成推杆动作,如通过各种杠杆、摇杆或连杆等机构可完成转动、摇动等复杂动作,通过改变杠杆力臂长度,可以增大或减小行程。电动推杆的外壳安装在箱体1底部,推杆安装在移动组件顶部。还可以采用液压缸,液压缸为现在技术,将液压能转变为机械能,做直线往复运动的液压执行元件,由缸筒和缸盖、活塞和活塞杆、密封装置、缓冲装置与排气装置组成,液压缸的缸筒安装在箱体1底部,活塞杆安装在移动组件顶部。
43.实施例4
44.本实施例将技术进一步进行说明,所述震动管11的工作端穿出箱体1的长度为60cm-70cm。
45.本实施例具有的技术效果为:
46.如图1、图2和图3所示,本实施例中,震动管11的工作端穿出箱体1的长度不易过长和过短,过长时会导致震动管11的工作端插入混凝土的深度过长,过长会导致震动管11的工作端可能会碰撞模板、拉杆、钢筋及预埋件等,混凝土振捣不密实,过短时会导致震动管11的工作端插入混凝土的深度过短,混凝土振捣不密实,影响公路路面的质量,达不到施工要求,还会影响市民的行车安全。
47.本实施例中在伸缩组件的最大伸长量时,箱体1底部至地面的高度为1米,在伸缩组件的最小伸长量时,箱体1底部至地面的高度为50厘米。
48.在实际运用时,根据路面宽度、混凝土的厚度和混凝土的塌落度来确定震动管11的工作端穿出箱体1的长度,长度可以确定为60cm、70cm、65cm和60cm至70cm之间的任意深度,确定的长度使震动管11的工作端插入混凝土后将混凝土振捣密实,还不能碰撞模板、拉杆、钢筋及预埋件等,振捣完毕后,应边振动边徐徐提出震动管11。
49.实施例5
50.本实施例将技术进一步进行说明,所述固定杆6的两端通过第二固定块20安装在对应安装室的内侧壁上。
51.本实施例具有的技术效果为:
52.如图1所示,本实施例结构简单,便于工作人员拆装和维修安装室内的零件。
53.本实施例中固定杆6的两端通过第二固定块20安装在对应安装室的内侧壁上具体为,固定杆6的左端通过第二固定块20安装在安装室的左侧壁上,固定杆6的右端通过第二固定块20安装在安装室的右侧壁上。
54.如图4所示,本实施例固定杆6的一端开设有四个槽,四个槽沿固定杆6横截面的中心对称,每个槽内均设置有沿槽深方向滑动的安装板,安装板与槽之间设置有弹簧,弹簧的一端安装在槽的底部,另一端安装在安装板上,安装板上安装有定位块,第二固定块20上开设有用于定位块通过的定位孔,定位块嵌入定位孔内,使用时,工作人员将固定杆6上的定位块压回槽内,将固定杆6穿入第二固定块20内旋转固定杆6,当定位块旋转至第二固定块20上开设的定位孔时,定位块穿过定位孔,将固定杆6固定在第二固定块20上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1