一种一箱二芯独立运行新型道闸的制作方法
1.本实用新型涉及道闸设备技术领域,特别涉及一种一箱二芯独立运行新型道闸。
背景技术:
2.道闸又称挡车器,专门用于道路上限制机动车行驶的出入口管理设备,现广泛应用于公路收费站、停车场系统等场所,以对车辆出入进行有序管理。
3.双杆道闸通常包括有机箱、两个机芯和两个闸杆,机芯用于驱动闸杆上下转动,以达到开合闸的目的。机芯安装于机箱内,闸杆则是安装于机箱外,通过机箱将机芯与外部隔离,避免灰尘等杂质落于机芯上,同时还可避免机芯因暴露于外而被人为破坏。
4.在专利公开号为cn206408559u、专利名称为“双杆式一体道闸”的文献中,如图1所示,双杆式道闸的两个机芯(电机驱动机构一6、电机驱动机构二7)分别安装于道闸机箱的同一内侧壁上,如此会导致道闸机箱的尺寸较大,从而增加双杆道闸的生产成本,同时也不便运输。
技术实现要素:
5.本实用新型的主要目的在于提出一种一箱二芯独立运行新型道闸,旨在解决现有的双杆道闸存在生产成本高及运输不便的技术问题。
6.为实现上述目的,本实用新型提出一种一箱二芯独立运行新型道闸,所述一种一箱二芯独立运行新型道闸包括机箱和设于所述机箱内的控制器、第一机芯、第一闸杆、第二机芯和第二闸杆,所述第一机芯与所述第二机芯安装于所述机箱的相对两侧,所述第一机芯的输出执行端与所述第一闸杆连接,所述第二机芯的输出执行端与所述第二闸杆连接,所述第二闸杆与所述第一闸杆的延伸方向相反,所述控制器用于控制所述第一机芯驱动所述第一闸杆开合以及控制所述第二机芯驱动所述第二闸杆开合。
7.优选地,所述第一机芯包括第一电机、主动摆臂、弧形连杆、从动平衡臂和摆杆轴,所述第一电机的输出轴与所述主动摆臂连接,所述主动摆臂通过所述弧形连杆与所述从动平衡臂连接,所述从动平衡臂还与所述摆杆轴连接,所述摆杆轴横向穿设于所述机箱的侧壁。
8.优选地,所述从动平衡臂包括包括内部中空且周侧上具有开口的第一筒状结构和分别设置在所述第一筒状结构周侧上的平衡摆臂与从动摆臂,所述平衡摆臂、第一筒状结构、从动摆臂为一体设计,所述第一筒状结构的周向上靠近开口处设置有第一固定孔。
9.优选地,所述弧形连杆包括从动摆臂连接部、弧形过渡部和主动摆臂连接部,所述弧形过渡部分别与所述从动摆臂连接部和主动摆臂连接部连接,所述从动摆臂连接部和主动摆臂连接部上分别设置有供铰接轴穿过的第一铰接孔。
10.优选地,所述平衡摆臂包括一端与所述第一筒状结构连接的本体部和设置在所述本体部另一端的弹簧轴固定部。
11.优选地,所述主动摆臂包括内部中空且周侧上具有开口的第二筒状结构和与所述
第二筒状结构连接的摆动部,所述摆动部上设置有供铰接轴穿过的第二铰接孔,所述主动摆臂通过所述第二铰接孔与所述弧形连杆铰接,所述第二筒状结构的周向上靠近开口处设置有第二固定孔。
12.优选地,所述主动摆臂上设置有用于使之离开死点位置的手动拉环,所述手动拉环通过所述主动摆臂上的拉孔与所述主动摆臂连接。
13.优选地,所述第一机芯与所述第二机芯的结构相同。
14.优选地,所述控制器的数量设置为两个,两个所述控制器分别为第一控制器和第二控制器,所述第一控制器与所述第一机芯的输出执行端连接,所述第二控制器与所述第二机芯的输出执行端连接。
15.与现有技术相比,本实用新型实施例的有益技术效果在于:
16.本实用新型所提出的第一机芯与第二机芯分别安装于机箱的相对两侧,使得机箱的横向空间得以减小,从而减小机箱的整体体积,降低双杆道闸的生产成本,同时方便运输。
附图说明
17.图1为现有双杆式一体道闸的结构示意图;
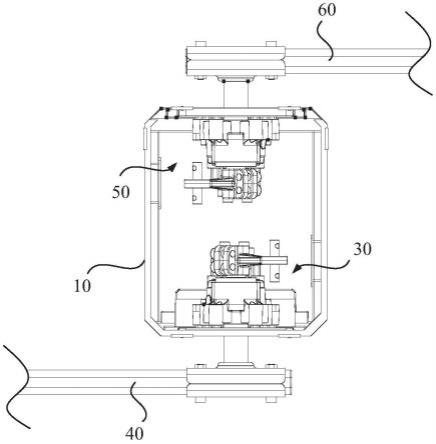
18.图2为本实用新型一实施例中一种一箱二芯独立运行新型道闸的结构示意图;
19.图3为图2实施例中的一种一箱二芯独立运行新型道闸的俯视图;
20.图4为图2实施例中的一种一箱二芯独立运行新型道闸的主视图;
21.图5为图2实施例中的一种一箱二芯独立运行新型道闸的第一机芯的结构示意图;
22.图6为图5实施例中第一机芯的从动平衡臂的结构示意图;
23.图7为图5实施例中第一机芯的弧形连杆的结构示意图;
24.图8为图5实施例中第一机芯的主动摆臂的结构示意图。
具体实施方式
25.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制,基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
27.还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
28.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方
案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
29.实施例一
30.请参见图2-4,本实用新型提出一种一箱二芯独立运行新型道闸,该一种一箱二芯独立运行新型道闸包括机箱10和设于机箱10内的控制器20、第一机芯30、第一闸杆40、第二机芯50和第二闸杆60,第一机芯30与第二机芯50安装于机箱10的相对两侧,第一机芯30的输出执行端与第一闸杆40连接,第二机芯50的输出执行端与第二闸杆60连接,第二闸杆60与第一闸杆40的延伸方向相反,控制器20用于控制第一机芯30驱动第一闸杆40开合以及控制第二机芯50驱动第二闸杆60开合。
31.本实施例中,一箱二芯独立运行新型道闸包括有两个机芯和两个闸杆,两个机芯分别为第一机芯30和第二机芯50,两个闸杆分别为第一闸杆40和第二闸杆60,第一机芯30用于驱动第一闸杆40开合,第二机芯50用于驱动第二闸杆60开合。
32.第一机芯30与第二机芯50分别与控制器20电连接,通过控制器20控制第一机芯30驱动第一闸杆40开合以及控制第二机芯50驱动第二闸杆60开合。其中,控制器20可以设置为一个或两个,当控制器20设置为一个时,第一机芯30和第二机芯50分别通过该控制器20控制,当控制器20设置为两个时,两个控制器20分别与第一机芯30和第二机芯50连接,以分别控制第一机芯30与第二机芯50。
33.第一机芯30与第二机芯50均安装在机箱10的内侧,且第一机芯30与第二机芯50分别位于机箱10的相对两侧,具体为机箱10的前后两侧。由于第一机芯30与第二机芯50分别设置在机箱10的前后两侧,而不是设置在机箱10的同一侧,因此,可大大减小机芯对于机箱10的空间占用,从而减小机箱10的整体体积,进而降低道闸的生产成本,同时还可方便运输。
34.第一闸杆40与第二闸杆60的延伸方向相反,可分别用于道路入口和道路出口的车辆进出管理。具体的,假设第一闸杆40用于道路入口,而第二闸杆60用于道路出口,若有车辆进入,则通过控制器20控制第一闸杆40打开,使得车辆能够通过道路入口进入;若有车辆驶出,则通过控制器20控制第二闸杆60打开,使得车辆能够通过道路出口驶出。
35.实施例二
36.请参见图5,本实用新型所提出的第一机芯30包括第一电机31、主动摆臂32、弧形连杆33、从动平衡臂34和摆杆轴35,第一电机31的输出轴与主动摆臂32连接,主动摆臂32通过弧形连杆33与从动平衡臂34连接,从动平衡臂34还与摆杆轴35连接,摆杆轴35横向穿设于机箱10的侧壁。本实施例中,第一电机31通过线缆与控制器20电连接,控制器20通过线缆控制第一电机31的运行,第一电机31的输出轴与主动摆臂32连接,第一电机31转动将带动主动摆臂32转动。主动摆臂32通过弧形连杆33与从动平衡臂34连接,弧形连杆33的两端分别与主动摆臂32和从动平衡臂34铰接,主动摆臂32转动将通过弧形连杆33带动从动平衡臂34摆动。从动平衡臂34上连接有摆杆轴35,摆杆轴35用于与第一闸杆40连接,从动平衡臂34转动将带动摆杆轴35摆动,摆杆轴35摆动后将带动第一闸杆40转动,从而实现对于第一闸杆40的开合控制。进一步的,本实施例所提出的第一机芯30还可包括减速器,第一电机31通过减速器与主动摆臂32连接。作为优选,减速器可采用行星减速器,此仅为示例性的,而非
限制性的,本领域技术人员可根据实际情况进行设计。
37.实施例三
38.请参见图6,本实施例所提出的从动平衡臂34包括包括内部中空且周侧上具有开口的第一筒状结构341和分别设置在第一筒状结构341周侧上的平衡摆臂342与从动摆臂343,第一筒状结构341的周向上靠近开口处设置有第一固定孔344。本实施例中,从动平衡臂34为一体式设计,相较于传统的分体式设计,本实用新型将平衡摆臂342与从动摆臂343两个部件合为一个部件,在生产制造上可节省成本,在部件装配上可节省时间,在机箱10设计上可节省空间。此外,由于平衡摆臂342与从动摆臂343为一体式设计,因此弧形连杆33传递的力是直接传递给从动平衡臂34整体,而不是先传递给从动摆臂343,再传递给平衡摆臂342,也就是说可以更直接地传递动力,使得传动更加精准。本实用新型实施例所提出的从动平衡臂34通过具有开口的第一筒状结构341,将从动平衡臂34套设在从动摆杆轴35上,而后再通过螺栓和第一固定孔344将从动平衡臂34固定在从动摆杆轴35上。
39.实施例四
40.请参见图7,本实施例所提出的弧形连杆33包括从动摆臂连接部331、弧形过渡部332和主动摆臂连接部333,弧形过渡部332分别与从动摆臂连接部331和主动摆臂连接部333连接,从动摆臂连接部331和主动摆臂连接部333上分别设置有供铰接轴穿过的第一铰接孔334。本实施例中,通过弧形连杆33连接主动摆臂32与从动摆臂343,其可实现机械限位作用,也就是主动摆臂32和从动摆臂343通过弧形连杆33连接,使得闸杆在水平状态和垂直状态下的两个位置为死点位置,从而起到起落自锁的作用。
41.实施例五
42.请参见图6,本实施例所提出的平衡摆臂342包括一端与第一筒状结构341连接的本体部3421和两个间隔设置在本体部3421另一端的弹簧轴固定部3422。本实施例中,弹簧轴固定部3422上设置有供弹簧轴穿过的轴孔,弹簧轴穿过轴孔,然后在弹簧轴上设置伸缩弹簧,以通过伸缩弹簧的伸缩力使得传动自锁装置达到平衡。
43.实施例六
44.请参见图8,本实施例所提出的主动摆臂32包括内部中空且周侧上具有开口的第二筒状结构321和与第二筒状结构321连接的摆动部322,摆动部322上设置有供铰接轴穿过的第二铰接孔323,主动摆臂32通过第二铰接孔323与弧形连杆33铰接,第二筒状结构321的周向上靠近开口处设置有第二固定孔324。本实施例中,主动摆臂32通过第二筒状结构321卡持在行星减速机的输出轴上,而后再通过螺栓和第二固定孔324将主动摆臂32固定在行星减速机的输出轴上。主动摆臂32固定在行星减速机的输出轴上后,行星减速机转动将带动主动摆臂32转动,主动摆臂32再通过第二铰接孔323与弧形连杆33铰接,以带动弧形连杆33摆动。
45.实施例七
46.本实施例所提出的主动摆臂32上设置有用于使之离开死点位置的手动拉环,手动拉环通过主动摆臂32上的拉孔与主动摆臂32连接。本实施例中,在断电状态下,若道闸处于死点位置,通过施加外力于闸杆或从动摆杆轴35上是起不到作用的,只有施加外力于主动摆臂32上才能使道闸离开死点位置,然后才能自由移动。具体的,本实用新型实施例在主动摆臂32上设置有一个可供手动拉环穿过的拉孔,拉环通过拉孔与主动摆臂32连接,当需要
在主动摆臂32上施加外力时,通过拉动手动拉环即可实现。
47.实施例八
48.本实施例所提出的第一机芯30与第二机芯50的结构相同。本实施例中,第一机芯30与第二机芯50的结构相同,第二机芯50的结构也可与第一机芯30的结构不同,本领域技术人员可根据实际情况进行设计。
49.实施例九
50.请参见图4,本实施例所提出的控制器20的数量设置为两个,两个控制器20分别为第一控制器和第二控制器,第一控制器与第一机芯30的输出执行端连接,第二控制器与第二机芯50的输出执行端连接。本实施例中,第一控制器用于控制第一机芯30驱动第一闸杆40开合,第二控制器用于控制第二机芯50驱动第二闸杆60开合,第一控制器与第二控制器相互独立,互不干扰,从而能够保证对第一闸杆40与第二闸杆60的控制精度。
51.以上的仅为本实用新型的部分或优选实施例,无论是文字还是附图都不能因此限制本实用新型保护的范围,凡是在与本实用新型一个整体的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1