沥青滚平机及机器学习装置的制作方法
1.本发明涉及一种沥青滚平机。
背景技术:
2.已知有一种沥青滚平机,其具备:输送机,将储存于料斗内的铺路材料传送到牵引机的后侧;螺杆,将由输送机传送的铺路材料铺散在牵引机的后侧;及整平机,将由螺杆铺散的铺路材料在螺杆的后侧铺匀(参考专利文献1。)。在该沥青滚平机中,输送机配置成其一部分暴露于料斗的底面中央部。因此,输送机能够将位于料斗的中央部的铺路材料传送到牵引机的后侧。当料斗内的铺路材料的量减少时,沥青滚平机的操作者手动关闭料斗,从而将位于料斗的底面端部的铺路材料收集到底面中央部,由输送机将位于底面端部的铺路材料传送到牵引机的后侧。
3.以往技术文献
4.专利文献
5.专利文献1:日本特开2017-160636号公报
技术实现要素:
6.发明要解决的技术课题
7.然而,若沥青滚平机的操作者怠于料斗的手动操作,则位于料斗的底面端部的铺路材料不会由输送机传送到牵引机的后侧,而残留于料斗的底面端部。尽管在料斗内残留有铺路材料,输送机也无法将铺路材料传送到牵引机的后侧。此时,由于供给到整平机的铺路材料的不足,有可能会在新建的道路上形成凹部。
8.因此,期望当料斗内的铺路材料的量减少时,更可靠地移动料斗。
9.用于解决技术课题的手段
10.本发明的实施方式所涉及的沥青滚平机具备:牵引机;料斗,设置于所述牵引机的前侧,并且接收铺路材料;输送机,将所述料斗内的铺路材料传送到所述牵引机的后侧;螺杆,将由所述输送机传送的铺路材料在所述牵引机的后侧铺开;及整平机,将由所述螺杆铺开的铺路材料在所述螺杆的后侧铺匀,所述沥青滚平机还具备:空间识别装置,监视所述料斗内的状态;及控制器,根据所述空间识别装置的输出来移动所述料斗。
11.发明效果
12.当料斗内的铺路材料的量减少时,上述沥青滚平机能够更可靠地移动料斗。
附图说明
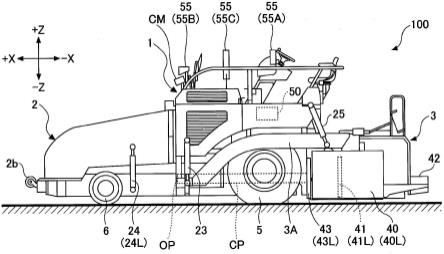
13.图1a是沥青滚平机的左视图。
14.图1b是沥青滚平机的俯视图。
15.图2是控制器的功能框图。
16.图3a是沥青滚平机及自卸车的左视图。
17.图3b是沥青滚平机及自卸车的左视图。
18.图3c是沥青滚平机及自卸车的左视图。
19.图4a是沥青滚平机的主视图。
20.图4b是沥青滚平机的主视图。
21.图4c是沥青滚平机的主视图。
22.图4d是沥青滚平机的主视图。
23.图4e是沥青滚平机的主视图。
24.图5是表示基于空间识别部的判定处理的一例的示意图。
具体实施方式
25.图1a及图1b是本发明的实施方式所涉及的沥青滚平机100的概略图。具体而言,图1a是沥青滚平机100的左视图,图1b是俯视图。
26.沥青滚平机100主要由牵引机1、料斗2及整平机3构成。在图1a及图1b所示的例子中,沥青滚平机100以车长方向与x轴方向对应且车宽方向与y轴方向对应的方式配置。而且,z轴以分别与x轴及y轴正交的方式配置。具体而言,车长方向的前侧对应于+x侧,车长方向的后侧对应于-x侧,车宽方向的左侧对应于+y侧,车宽方向的右侧对应于-y侧,铅垂方向的上侧对应于+z侧,铅垂方向的下侧对应于-z侧。
27.牵引机1是用于使沥青滚平机100行驶的机构。在图1a及图1b所示的例子中,牵引机1使用后轮行驶用马达旋转后轮5且使用前轮行驶用马达旋转前轮6,从而使沥青滚平机100移动。后轮行驶用马达及前轮行驶用马达是从液压泵接受工作油的供给而进行旋转的液压马达。牵引机1也可以具备履带来代替车轮。
28.控制器50是控制沥青滚平机100的控制装置。在图1a及图1b所示的例子中,控制器50是包括cpu、易失性存储装置及非易失性存储装置的计算机,其搭载于牵引机1。控制器50的各种功能例如通过由cpu执行存储于非易失性存储装置中的程序来实现。控制器50所实现的各种功能例如包括:控制吐出用于驱动液压促动器的工作油的液压泵的吐出量的功能;及控制液压促动器与液压泵之间的工作油的流动的功能。另外,液压促动器包括液压缸及液压马达。
29.料斗2是用于接收铺路材料的机构。铺路材料例如是沥青混合物。在图1a及图1b所示的例子中,料斗2设置于牵引机1的前侧(+x侧),并且构成为通过料斗缸24在y轴方向(车宽方向)上打开或关闭。沥青滚平机100通常在将料斗2完全打开的状态下从自卸车的载物台接收铺路材料。并且,沥青滚平机100当从自卸车的载物台接收铺路材料时,也经由推辊2b向前推压自卸车的同时持续行驶。图1a及图1b表示料斗2处于完全打开的状态。若料斗2内的铺路材料减少,则沥青滚平机100的操作者手动关闭料斗2,并将位于料斗2的内壁附近的铺路材料收集到料斗2的中央部。这是为了使位于料斗2的底面中央部的输送机cv能够向牵引机1的后侧传送铺路材料。传送到牵引机1的后侧的铺路材料通过螺杆sc在牵引机1的后侧且整平机3的前侧沿车宽方向被铺散。
30.在牵引机1安装有用于监视牵引机1的前方的状态的空间识别装置cm。空间识别装置cm例如为单目摄像机、立体摄像机或lidar等。在图1a及图1b所示的例子中,空间识别装置cm是对牵引机1的前方的状态进行拍摄的单目摄像机。此时,控制器50能够根据作为空间
识别装置cm的单目摄像机所拍摄的图像来判定料斗2内的铺路材料的量比规定量多还是少。
31.输送机cv由从液压泵接受工作油的供给而旋转的液压马达驱动。在图1a及图1b所示的例子中,输送机cv构成为,经由传送通道cp将料斗2内的铺路材料传送到牵引机1的后侧。传送通道cp是形成于牵引机1的内部的大致长方体形状的空间,在牵引机1的前表面1fw具有向料斗2内开口的大致长方形的入口op。
32.螺杆sc由从液压泵接受工作油的供给而旋转的液压马达驱动。具体而言,螺杆sc包括中央螺杆scm、左螺杆scl及右螺杆scr。中央螺杆scm设置于牵引机1的宽度内。左螺杆scl设置成,连结于中央螺杆scm的左端,并从牵引机1的宽度向左侧突出。右螺杆scr设置成,连结于中央螺杆scm的右端,并从牵引机1的宽度向右侧突出。
33.整平机3是用于铺匀铺路材料的机构。在图1a及图1b所示的例子中,整平机3主要包括主整平机30及伸缩整平机31。伸缩整平机31包括左伸缩整平机31l及右伸缩整平机31r。主整平机30、左伸缩整平机31l及右伸缩整平机31r前后错开配置。具体而言,在主整平机30的后侧配置有左伸缩整平机31l,在左伸缩整平机31l的后侧配置有右伸缩整平机31r。整平机3是由牵引机1牽引的浮动整平机,其经由调平臂3a连结于牵引机1。整平机3通过整平机抬升缸25的伸缩而与调平臂3a一同上下移动。
34.伸缩整平机31构成为通过伸缩缸60沿车宽方向伸缩。伸缩缸60被固定于主整平机30的框体的后表面的支承部支承,并且构成为能够使伸缩整平机31沿车宽方向伸缩。具体而言,伸缩缸60包括左伸缩缸60l及右伸缩缸60r。左伸缩缸60l使左伸缩整平机31l相对于主整平机30向车宽方向的左侧伸缩。右伸缩缸60r使右伸缩整平机31r相对于主整平机30向车宽方向的右侧伸缩。
35.调平臂3a构成为能够将整平机3连结于牵引机1。具体而言,调平臂3a的一端(后端)连结于整平机3,另一端(前端)可转动地连结于牵引机1。
36.调平缸23是为了调节铺路材料的铺匀厚度而使调平臂3a的前端上下运动的液压缸。在图1a及图1b所示的例子中,调平缸23的缸部连结于牵引机1,杆部连结于调平臂3a的前端。另外,调平臂3a的前端可上下滑动地安装于牵引机1。当增大铺匀厚度时,控制器50使液压泵吐出的工作油流入到调平缸23的杆侧油室内,使得调平缸23收缩而使调平臂3a的前端上升。另一方面,当减小铺匀厚度时,控制器50使调平缸23的杆侧油室内的工作油流出,使得调平缸23伸长而使调平臂3a的前端下降。
37.整平机抬升缸25是用于抬起整平机3的液压缸。在图1a及图1b所示的例子中,整平机抬升缸25的缸部连结于牵引机1,杆部连结于调平臂3a的后端。当抬起整平机3时,控制器50使液压泵吐出的工作油流入到整平机抬升缸25的杆侧油室内。其结果,整平机抬升缸25收缩,调平臂3a的后端被抬起,从而整平机3被抬起。另一方面,当放下被抬起的整平机3时,控制器50使得整平机抬升缸25的杆侧油室内的工作油能够流出。其结果,因整平机3的重量而整平机抬升缸25伸长,调平臂3a的后端下降,从而整平机3下降。
38.在伸缩整平机31的远端安装有侧板40。侧板40是沿车长方向延伸的板状部件,且包括左侧板40l及右侧板40r。具体而言,在左伸缩整平机31l的远端(左端)安装有左侧板40l,在右伸缩整平机31r的远端(右端)安装有右侧板40r。
39.侧板40还安装于伸缩犁板41的远端。伸缩犁板41是用于调节由螺杆sc铺散的铺路
材料中停留在伸缩整平机31的跟前的铺路材料的量的部件,其构成为能够与伸缩整平机31一同沿车宽方向伸缩。
40.具体而言,伸缩犁板41是沿车宽方向延伸的板状部件,且包括左伸缩犁板41l及右伸缩犁板41r。并且,在左伸缩犁板41l的远端(左端)安装有左侧板40l,在右伸缩犁板41r的远端(右端)安装有右侧板40r。
41.伸缩犁板41构成为能够与伸缩整平机31及侧板40无关地调节z轴方向上的高度。沥青滚平机100通过使伸缩犁板41上下移动,调节伸缩犁板41的下端与路基之间的间隙的大小,从而能够调节通过该间隙的铺路材料的量。因此,沥青滚平机100通过使伸缩犁板41上下移动,能够调节停留在伸缩犁板41的后侧(-x侧)并且伸缩整平机31的前侧(+x侧)的铺路材料的量(高度),进而能够调节被取入伸缩整平机31的下侧的铺路材料的量。
42.整平机台阶42是构成工作人员在整平机3的后方进行工作时的踏板的部件。具体而言,整平机台阶42包括左整平机台阶42l、中央整平机台阶42c及右整平机台阶42r。
43.固定板43是用于为了由螺杆sc沿车宽方向适当地铺散铺路材料而防止由螺杆sc沿车宽方向铺散的铺路材料散布到螺杆sc的前方的板状部件。在图1a及图1b所示的例子中,固定板43包括左固定板43l及右固定板43r。
44.接着,参考图2,对作为控制器50所具有的功能之一的支援功能进行说明。图2是控制器50的功能框图。支援功能是用于支援由沥青滚平机100的操作者进行的沥青滚平机100的操作的功能。支援功能主要由空间识别装置cm、螺杆转速传感器45、输送机进给速度传感器46、行驶速度传感器47、辅助存储装置48、控制器50、螺杆控制装置51、输送机控制装置52、料斗控制装置53、行驶控制装置54及输出装置55的协同实现。
45.螺杆转速传感器45构成为检测螺杆sc的转速。在图2所示的例子中,螺杆转速传感器45是检测驱动螺杆sc的液压马达的旋转轴的角速度的编码器。螺杆转速传感器45可以由检测形成于旋转板的狭缝的接近开关等构成。
46.输送机进给速度传感器46构成为检测输送机cv的进给速度。在图2所示的例子中,输送机进给速度传感器46是检测驱动输送机cv的液压马达的旋转轴的角速度的编码器。输送机进给速度传感器46可以由检测形成于旋转板的狭缝的接近开关等构成。
47.行驶速度传感器47构成为检测沥青滚平机100的行驶速度。在图2所示的例子中,行驶速度传感器47是检测驱动后轮5的后轮行驶用马达的旋转轴的角速度的编码器。行驶速度传感器47可以由检测形成于旋转板的狭缝的接近开关等构成。
48.辅助存储装置48构成为存储各种信息。在图2所示的例子中,辅助存储装置48是搭载于牵引机1的非易失性存储装置,且存储有各种信息。
49.螺杆控制装置51构成为控制螺杆sc的转速。在图2所示的例子中,螺杆控制装置51是控制流入驱动螺杆sc的液压马达的工作油的流量的电磁阀。具体而言,螺杆控制装置51根据来自控制器50的控制指示,增大或减小连接驱动螺杆sc的液压马达与液压泵的管道的截面面积即流路面积。更具体而言,螺杆控制装置51通过增大流路面积,增加流入驱动螺杆sc的液压马达的工作油的流量,增加螺杆sc的转速。或者,螺杆控制装置51通过减小流路面积,降低流入驱动螺杆sc的液压马达的工作油的流量,降低螺杆sc的转速。
50.输送机控制装置52构成为控制输送机cv的进给速度。在图2所示的例子中,输送机控制装置52是控制流入驱动输送机cv的液压马达的工作油的流量的电磁阀。具体而言,输
送机控制装置52根据来自控制器50的控制指示,增大或减小连接驱动输送机cv的液压马达与液压泵的管道的截面面积即流路面积。更具体而言,输送机控制装置52通过增大流路面积,增加流入驱动输送机cv的液压马达的工作油的流量,增加输送机cv的进给速度。或者,输送机控制装置52通过减小流路面积,降低流入驱动输送机cv的液压马达的工作油的流量,降低输送机cv的进给速度。
51.料斗控制装置53构成为控制料斗缸24的伸缩量。在图2所示的例子中,料斗控制装置53是控制流入料斗缸24或从料斗缸24流出的工作油的流量的电磁阀。具体而言,料斗控制装置53根据来自控制器50的控制指示,切换连接料斗缸24与液压泵的管道及连接料斗缸24与工作油罐的管道各自的连通/切断。更具体而言,料斗控制装置53构成为,通过使这些管道连通而使工作油流入料斗缸24的底侧油室,使料斗缸24伸长而自动关闭料斗2。或者,料斗控制装置53构成为,根据来自控制器50的控制指示,使这些管道连通,从而使工作油从料斗缸24的底侧油室流出,使料斗缸24收缩而打开料斗2。
52.行驶控制装置54构成为控制沥青滚平机100的行驶速度。在图2所示的例子中,行驶控制装置54是控制分别流入后轮行驶用马达及前轮行驶用马达的工作油的流量的电磁阀。具体而言,行驶控制装置54根据来自控制器50的控制指示,增大或减小将后轮行驶用马达及前轮行驶用马达分别与液压泵连接的管道的截面面积即流路面积。更具体而言,行驶控制装置54通过增加流路面积,增加分别流入后轮行驶用马达及前轮行驶用马达的工作油的流量,增加沥青滚平机100的行驶速度。或者,输送机控制装置52通过减小流路面积,降低分别流入后轮行驶用马达及前轮行驶用马达的工作油的流量,降低沥青滚平机100的行驶速度。
53.输出装置55构成为输出信息。信息包括视觉信息及听觉信息。图2所示的例子中,输出装置55构成为将信息传递给在沥青滚平机100的周围工作的工作人员。在沥青滚平机100的周围工作的工作人员包括沥青滚平机100的操作者及自卸车的驾驶员。具体而言,输出装置55是主监视器55a(参考图1a及图1b。)、声音输出装置55b(参考图1a及图1b。)及指示器55c(参考图1a及图1b。)。但是,输出装置55可以是主监视器55a、声音输出装置55b及指示器55c中的1个或2个。
54.主监视器55a构成为显示各种信息。在图2所示的例子中,主监视器55a是液晶显示器,能够根据来自控制器50的控制指示来显示各种信息。并且,主监视器55a可以包括接受沥青滚平机100的操作者的操作输入的触控面板等输入装置。
55.声音输出装置55b构成为向沥青滚平机100的周围输出声音。在图2所示的例子中,声音输出装置55b是向沥青滚平机100的周围输出声音的扬声器,能够根据来自控制器50的控制指示来输出警报音。声音输出装置55b可以输出声音信息。
56.指示器55c是具有朝向沥青滚平机100的前方的显示部的显示装置。在图2所示的例子中,指示器55c安装于牵引机1,以使就坐在自卸车的驾驶座的自卸车的驾驶员能够视觉辨识。具体而言,指示器55c设置在比牵引机1的上表面高的位置。指示器55c是led面板,能够根据来自控制器50的控制指示来显示各种信息。例如,能够向装载有铺路材料的自卸车的驾驶员显示后退指示,并告知该驾驶员自卸车可以后退。
57.在图2所示的例子中,指示器55c构成为,当使用时,能够以从牵引机1的右侧部向外侧伸出的方式展开。即,指示器55c构成为,当不使用时,能够以容纳在沥青滚平机100的
车宽内的方式折叠。
58.控制器50由空间识别装置cm、螺杆转速传感器45、输送机进给速度传感器46、行驶速度传感器47及辅助存储装置48等获取信息,并执行各种运算之后,根据其运算结果来将控制指示输出到螺杆控制装置51、输送机控制装置52、料斗控制装置53、行驶控制装置54及输出装置55等。
59.具体而言,控制器50根据由空间识别装置cm、螺杆转速传感器45、输送机进给速度传感器46、行驶速度传感器47及辅助存储装置48中的至少1个获取的信息来判定是否满足了规定的条件,当判定为满足了规定的条件时,将控制指示输出到螺杆控制装置51、输送机控制装置52、料斗控制装置53、行驶控制装置54及输出装置55等中的至少1个。
60.更具体而言,控制器50具有空间识别部50a及料斗控制部50b,作为由软件、硬件或它们的组合构成的功能模块。
61.空间识别部50a构成为根据空间识别装置cm的输出来识别牵引机1的前方的状态。在图2所示的例子中,空间识别部50a构成为识别料斗2内的铺路材料的高度。料斗2内的铺路材料的高度例如是料斗2内的中央部mp(参考图1b。)的料斗2的底面与铺路材料的表面之间的距离。料斗2的中央部mp例如是输送机cv暴露的部分。
62.具体而言,空间识别部50a通过对作为空间识别装置cm的单目摄像机所拍摄的图像实施规定的图像处理来导出料斗2内的中央部mp的铺路材料的高度。另外,空间识别部50a可以通过对作为空间识别装置cm的单目摄像机所拍摄的图像实施规定的图像处理来导出料斗2内的中央部mp的铺路材料的体积或重量等。或者,空间识别部50a可以根据作为空间识别装置cm的lidar的输出来导出料斗2内的中央部mp的铺路材料。
63.并且,空间识别部50a判定导出的高度是否比规定的高度大。规定的高度例如是预先注册在辅助存储装置48中的值(高度)。规定的高度例如是传送通道cp的入口op的高度。另外,当导出料斗2内的中央部mp的铺路材料的体积时,空间识别部50a判定导出的体积是否比规定的体积大。
64.空间识别部50a可以构成为判定在沥青滚平机100的前方是否存在自卸车。具体而言,空间识别部50a可以构成为,通过对作为空间识别装置cm的单目摄像机所拍摄的图像实施规定的图像处理,判定自卸车是否经由推辊2b与沥青滚平机100接触、自卸车是否自卸了载物台、自卸车是否靠近沥青滚平机100、或自卸车是否远离沥青滚平机100等。另外,当自卸车与沥青滚平机100接触时,自卸车的后轮轮胎与配置于料斗2的前侧的推辊2b(参考图1a及图1b。)抵接。此时,自卸车的驾驶员将自卸车的档位变更为空挡状态。从而,自卸车被沥青滚平机100的驱动力推压,与沥青滚平机100一同前进。
65.图3a~图3c是沥青滚平机100及自卸车200的左视图。自卸车200是搬运供给至沥青滚平机100的料斗2内的铺路材料的搬运车辆的一例。
66.图3a~图3c示出自卸车200的3种状态。具体而言,图3a示出将装载于自卸车200的载物台的铺路材料供给至沥青滚平机100的料斗2内时的沥青滚平机100及自卸车200的状态。在图3a中,与沥青滚平机100接触的自卸车200的载物台200b被自卸。
67.图3b示出将装载于载物台200b的铺路材料全部供给至料斗2内之后自卸的载物台200b恢复到未自卸的状态时的沥青滚平机100及自卸车200的状态。在图3b中,自卸车200仍经由推辊2b与沥青滚平机100接触。
68.图3c示出自卸车200前进并与沥青滚平机100分开时的沥青滚平机100及自卸车200的状态。
69.空间识别部50a能够通过对作为空间识别装置cm的单目摄像机所拍摄的图像实施规定的图像处理,判定当前时刻的沥青滚平机100及自卸车200的状态是如图3a所示的状态、还是如图3b所示的状态、或是如图3c所示的状态等。
70.并且,空间识别部50a可以构成为判定料斗2内是否存在进入物。具体而言,空间识别部50a可以构成为,通过对作为空间识别装置cm的单目摄像机所拍摄的图像实施规定的图像处理,判定工作人员是否进入到料斗2内、或在料斗2内是否装有耙子或铲子等工具等。
71.并且,空间识别部50a可以构成为判定料斗2内的铺路材料是否已用光。具体而言,空间识别部50a可以构成为,通过对作为空间识别装置cm的单目摄像机所拍摄的图像实施规定的图像处理,判定料斗2内的铺路材料是否已用光。
72.料斗控制部50b构成为,当满足规定的条件时,关闭料斗2。在图2所示的例子中,空间识别部50a根据作为空间识别装置cm的单目摄像机所拍摄的图像来判定料斗2内的中央部mp的铺路材料的高度是否比规定的高度大。并且,当空间识别部50a判定为料斗2内的中央部mp的铺路材料的高度比规定的高度大时,料斗控制部50b向料斗控制装置53发送关闭指示。接收到关闭指示的料斗控制装置53通过使工作油流入料斗缸24的底侧油室而使料斗缸24伸长并关闭料斗2。料斗控制部50b例如可以使料斗缸24伸长至料斗2完全关闭为止,也可以使料斗缸24仅伸长规定的长度。
73.并且,料斗控制部50b可以当关闭料斗2时,即,当使料斗缸24伸长时,向输出装置55发送输出指示。接收到输出指示的输出装置55例如可以通过使主监视器55a显示“料斗正在关闭”等文本信息,告知沥青滚平机100的操作者自动进行了关闭料斗2的动作。或者,输出装置55例如可以通过使声音输出装置55b输出“料斗正在关闭”等声音信息,告知在沥青滚平机100的周围工作的工作人员自动进行了关闭料斗2的动作。或者,输出装置55例如可以通过使指示器55c输出“料斗正在关闭”等文本信息,告知自卸车200的驾驶员自动进行了关闭料斗2的动作。
74.料斗控制部50b可以构成为,当空间识别部50a根据作为空间识别装置cm的单目摄像机所拍摄的图像来判定为自卸车200与沥青滚平机100接触时,即使在空间识别部50a判定为满足上述规定的条件的情况下,也不关闭料斗2。这是为了防止料斗翼与自卸车接触。此时,料斗控制部50b可以构成为不向料斗控制装置53发送关闭指示,也可以向料斗控制装置53发送停止指示。接收到停止指示的料斗控制装置53通过停止工作油流入料斗缸24的底侧油室来停止料斗缸24的伸长而停止料斗2的动作。
75.并且,料斗控制部50b可以构成为,即使当空间识别部50a判定为自卸车200未与沥青滚平机100接触时,在空间识别部50a判定为自卸车200与沥青滚平机100之间的距离为规定距离以下的情况下,与空间识别部50a判定为自卸车200与沥青滚平机100接触的情况同样地,也不关闭料斗2。
76.并且,料斗控制部50b可以构成为,当空间识别部50a根据作为空间识别装置cm的单目摄像机所拍摄的图像来判定为在料斗2内存在进入物时,即使在空间识别部50a判定为满足上述规定的条件的情况下,也不关闭料斗2。这是为了防止料斗翼与进入物接触、或者为了防止进入物(例如铲子)被料斗2内的铺路材料掩埋。此时,料斗控制部50b可以构成为
不向料斗控制装置53发送关闭指示,也可以构成为向料斗控制装置53发送停止指示。
77.并且,料斗控制部50b可以构成为,当空间识别部50a根据作为空间识别装置cm的单目摄像机所拍摄的图像来判定为料斗2内的铺路材料已用光时,使输送机cv的进给速度、螺杆sc的转速及沥青滚平机100的行驶速度减速。而且,料斗控制部50b可以构成为停止输送机cv、螺杆sc、后轮5及前轮6的动作。这是因为,当在料斗2内没有铺路材料的状态下通过沥青滚平机100持续施工时,由于铺路材料的不足而在新建的道路上形成凹部。
78.此时,料斗控制部50b分别向螺杆控制装置51、输送机控制装置52及行驶控制装置54发送减速指示或停止指示。接收到减速指示或停止指示的螺杆控制装置51通过降低流入驱动螺杆sc的液压马达的工作油的流量,降低螺杆sc的转速、或者停止螺杆sc的旋转。关于输送机控制装置52及行驶控制装置54,也相同。
79.图4a~图4e是沥青滚平机100的主视图。图4a~图4e概略地示出料斗2内的铺路材料pm的5种状态。为了清楚起见,在图4a~图4e中,对料斗2内的铺路材料pm标注了点阴影线。并且,在图4a中,图示了牵引机1的基底部1bf、前轮6(左前轮6l及右前轮6r)及料斗缸24(左料斗缸24l及右料斗缸24r),但是在图4b~图4e中进行了省略。并且,在图4a、图4c及图4d中,形成于牵引机1的前表面1fw的传送通道cp的入口op中被铺路材料pm掩埋而实际上看不到的部分由虚线表示。
80.具体而言,图4a示出刚由自卸车200供给铺路材料pm之后的料斗2内的铺路材料pm的状态。具体而言,图4a示出如图3b所示那样将装载于自卸车200的载物台200b的铺路材料供给至料斗2内之后的料斗2内的铺路材料pm的状态。更具体而言,图4a示出在由牵引机1的前表面1fw和料斗翼2w(左料斗翼2wl及右料斗翼2wr)包围的料斗2内的空间储存有足够量的铺路材料pm的状态。
81.图4b示出料斗2内的铺路材料pm的量减少时的状态。具体而言,图4b示出位于料斗2的中央部mp的铺路材料pm由输送机cv传送到牵引机1的后侧,且料斗2的中央部mp的铺路材料pm的高度成为高度h1时的状态。即,图4b示出料斗2的中央部mp的铺路材料pm的高度h1比规定的高度ht小。在图4b所示的例子中,规定的高度ht对应于形成于牵引机1的前表面1fw的传送通道cp的入口op的高度。另一方面,图4b示出料斗2内的左端部及右端部各自的铺路材料pm的高度是高度h2,仍比规定的高度ht大。
82.在图4b所示的状态下,空间识别部50a能够根据作为空间识别装置cm的单目摄像机所拍摄的图像来判定为料斗2内的中央部mp的铺路材料的高度h1比规定的高度ht小。
83.当空间识别部50a判定为料斗2内的中央部mp的铺路材料的高度h1比规定的高度ht小时,料斗控制部50b向料斗控制装置53发送关闭指示。接收到关闭指示的料斗控制装置53通过使工作油流入料斗缸24的底侧油室而使料斗缸24伸长并关闭料斗2。
84.图4c及图4d示出料斗2关闭时的料斗2内的铺路材料pm的状态。具体而言,图4c示出左料斗翼2wl及右料斗翼2wr分别关闭一半左右时(料斗角度成为角度α1时)的状态,图4d示出左料斗翼2wl及右料斗翼2wr分别完全关闭时(料斗角度成为角度α2时)的状态。另外,图4a及图4b示出左料斗翼2wl及右料斗翼2wr分别完全打开时(料斗角度为零时)的状态。料斗角度例如是形成于料斗2的底面与规定的假想平面之间的角度。规定的假想平面例如是沥青滚平机100所在的假想平面,典型而言,是假想水平面。
85.图4e示出在料斗2内的左端部及右端部分别残留有铺路材料pm的状态下,在中央
部mp中铺路材料pm已用光时的状态。具体而言,图4e示出在图4b所示的状态之后,料斗2完全打开的状态被原样保持时所产生的料斗2内的铺路材料pm的状态。
86.料斗控制部50b能够通过当料斗2内的中央部mp的铺路材料的高度成为规定的高度ht以下时自动关闭料斗2,将料斗2内的左端部及右端部各自的铺路材料pm收集到中央部mp。因此,料斗控制部50b能够防止发生如图4e所示的在料斗2内的左端部及右端部分别残留有铺路材料pm的状态下,在中央部mp中铺路材料pm已用光的状况。其结果,料斗控制部50b能够防止因供给至整平机3的铺路材料pm的不足而在新建的道路上形成凹部。
87.如上所述,沥青滚平机100具备:牵引机1;料斗2,设置于牵引机1的前侧,并且接收铺路材料;输送机cv,将料斗2内的铺路材料传送到牵引机1的后侧;螺杆sc,将由输送机cv传送的铺路材料在牵引机1的后侧铺散;及整平机3,将由螺杆sc铺散的铺路材料在螺杆sc的后侧铺匀。并且,沥青滚平机100还具备:空间识别装置cm,监视料斗2内的状态;及控制器50,根据空间识别装置cm的输出来移动料斗2。
88.通过该结构,当料斗2内的铺路材料pm的量减少时,沥青滚平机100能够可靠地移动料斗2。因此,沥青滚平机100能够可靠地防止发生如下状况:尽管在料斗2内的端部充分残留有铺路材料pm,供给至整平机3的铺路材料pm也不足。
89.控制器50期望构成为,当判定为料斗2内的铺路材料pm的量比规定量少时,关闭料斗2。例如,控制器50可以构成为,当判定为料斗2内的中央部mp的铺路材料pm的高度比规定的高度ht小时,判定为料斗2内的铺路材料pm的量比规定量少,自动关闭料斗2。并且,当自动关闭料斗2时,控制器50可以构成为告知周围该内容。
90.或者,控制器50可以构成为,当判定为料斗2内的铺路材料pm从比规定量多的状态过渡到比该规定量少的状态时,关闭料斗2。例如,控制器50可以构成为,当判定为料斗2内的中央部mp的铺路材料pm的高度从比规定的高度ht大的状态过渡到比规定的高度ht小的状态时,判定为料斗2内的铺路材料pm从比规定量多的状态过渡到比该规定量少的状态,关闭料斗2。并且,当关闭料斗2时,控制器50可以构成为告知周围该内容。
91.通过这些结构,当料斗2内的铺路材料pm的量比规定量少时,沥青滚平机100能够可靠地关闭料斗2。并且,沥青滚平机100能够通过利用输出装置55,告知在沥青滚平机100的周围工作的工作人员进行料斗2的关闭动作、或者进行料斗2的关闭操作。
92.控制器50可以构成为,在移动料斗2之前、或者当移动料斗2时,判定料斗2内是否存在进入物。例如,控制器50可以构成为,通过对作为空间识别装置cm的单目摄像机所拍摄的图像实施规定的图像处理,判定工作人员是否进入到料斗2内、或在料斗2内是否装有耙子或铲子等工具等。并且,控制器50当判定为在料斗2内存在工作人员、耙子或铲子等进入物时,即使在判定为料斗2内的铺路材料pm的量比规定量少的情况下,也可以不关闭料斗2。这是为了防止料斗翼2w与进入物接触、或者为了防止进入物被料斗2内的铺路材料pm掩埋。
93.并且,在上述实施方式中,使用了液压马达,但是也可以使用电马达,而不是液压马达。
94.以上,对本发明的优选实施方式进行了详细说明。然而,本发明并不仅限于上述实施方式。上述实施方式在不脱离本发明的范围的情况下,能够适用各种变形或替换等。并且,分别说明的特征只要不产生技术矛盾,就能够进行组合。
95.例如,在上述实施方式中,控制器50构成为,当满足规定的条件时,关闭料斗2。并
且,典型而言,控制器50构成为,当料斗2完全关闭时,停止料斗缸24的伸长。然而,当料斗2完全关闭时、或者当料斗2欲完全关闭时,控制器50可以在规定时间内使料斗缸24伸缩。即,控制器50可以使料斗2振动。这是为了抖落粘着于料斗翼2w的内壁或底面的铺路材料pm。
96.并且,控制器50可以构成为,根据空间识别部50a所导出的铺路材料pm的高度来对料斗角度进行反馈控制,以使料斗2内的中央部mp的铺路材料pm的高度成为所期望的高度。
97.或者,控制器50可以根据作为空间识别装置cm的单目摄像机所拍摄的图像来识别关闭料斗2之前的料斗2内的铺路材料pm的状态。并且,控制器50可以根据其识别结果来推断关闭料斗2时的料斗2内的铺路材料pm的状态。料斗2内的铺路材料pm的状态例如根据铺路材料pm的休止角β(参考图4b。)等来推断。典型而言,休止角β根据铺路材料pm的种类来预先设定。此时,控制器50可以根据推断结果来确定目标料斗角度。即,控制器50可以确定将料斗2关闭何种程度。
98.并且,控制器50可以使用学习了控制条件的学习完毕模型进行各种判定。例如,控制器50的空间识别部50a可以使用学习了料斗2的控制条件的学习完毕模型进行各种判定。各种判定例如是如下判定等:料斗2内的铺路材料的量比规定量多还是少;沥青滚平机100的前方是否存在自卸车200;自卸车200是否远离沥青滚平机100;料斗2内是否存在进入物;料斗2内的中央部mp的铺路材料的高度是否比规定的高度大;或者料斗2内的铺路材料是否已用光。
99.具体而言,空间识别部50a使用存储于非易失性存储装置中的学习完毕模型,根据作为空间识别装置cm的单目摄像机所拍摄的图像即输入图像来进行各种判定。具体而言,空间识别部50a将学习完毕模型从非易失性存储装置装载到ram等主存储装置中,使cpu执行基于该学习完毕模型的处理,从而根据输入图像来进行各种判定。
100.例如,如图5所示,学习完毕模型可以以神经网络(neural network)401为中心构成。在该例子中,神经网络401是在输入层及输出层之间具有一层以上的中间层(隐藏层)的、所谓的深度神经网络。在图5的例子中,中间层的数量为n个(n为2以上的自然数)。在神经网络401中,按构成各中间层的多个神经元中的每一个,规定了表示与下位层之间的连接强度的加权参数。在图5的例子中,神经元的数量为l个(l为2以上的自然数)。并且,各层的神经元以通过阈值函数将按上位层的每一个神经元规定的加权参数分别乘以来自上位层的多个神经元的输入值而得的值的总和输出到下位层的神经元的方式构成神经网络401。
101.以神经网络401作为对象,进行机器学习、具体而言深层学习(深度学习:deep learning),实现上述加权参数的最佳化。从而,例如,如图5所示,神经网络401中,能够输入输入图像作为输入信号x,并能够输出预先规定的监视对象列表(在本例子中,物体的每一种类的物体存在的概率(预测概率))和基于它们的位置关系等的场景(状况)作为输出信号y。神经网络401例如是卷积神经网络(cnn:convolutional neural network)。cnn是应用了已有的图像处理技术(卷积处理及汇集处理)的神经网络。具体而言,cnn通过反复进行对输入图像的卷积处理及汇集处理的组合来输出比输入图像紧凑化的特征量数据(特征图)。并且,将输出的特征图的各像素的像素值输入到由多个完全连接层构成的神经网络,神经网络的输出层例如能够输出表示料斗2内的铺路材料的状态的值。
102.如此,神经网络401可以构成为,能够输入输入图像作为输入信号x,并能够输出输入图像中的物体的位置及大小(即,输入图像上的物体的占据区域)及该物体的种类作为输
出信号y(例如,表示料斗2内的铺路材料的状态的值)。即,神经网络401可以是进行输入图像上的物体的检测(判定输入图像中有无物体的占据区域)和该物体的分类的结构。并且,此时,输出信号y可以以对于作为输入信号x的输入图像重叠地附加了物体的占据区域及与其分类有关的信息的图像数据形式构成。从而,空间识别部50a能够根据输入图像中的物体的占据区域的位置及大小等来确定例如料斗2内的铺路材料的状态。
103.在上述实施方式中,作为空间识别装置cm的单目摄像机固定于牵引机1的前端的上端部,并预先规定(固定)了摄像范围(视场角)。并且,当由学习完毕模型检测出的物体(料斗2内的铺路材料)的位置在监视区域内,并且分类为监视对象列表的物体时,空间识别部50a能够判定为在监视区域内检测出监视对象的物体。另外,神经网络401可以是具有分别相当于提取输入图像中的物体存在的占据区域(风窗)的处理及确定所提取的区域的物体的种类的处理的神经网络的结构。即,神经网络401可以是阶段性地进行物体的检测和物体的分类的结构。并且,神经网络401可以是具有与如下处理分别对应的神经网络的结构:按将输入图像的整个区域划分为规定数量的部分区域的每个网格单元规定物体的分类和物体的占据区域(边界框:bounding box);及根据每个网格单元的物体的分类,连接每种物体的占据区域,确定最终物体的占据区域。即,神经网络401可以是并列进行物体的检测和物体的分类的结构。
104.并且,控制器50可以构成为学习与料斗2的打开或关闭状态建立关联的控制条件。例如,控制器50可以构成为,按照根据由空间识别装置cm获取到的料斗2内的铺路材料的摄像图像等与作为预先存储于非易失性存储装置中的判定数据的表示“料斗2的优选的打开或关闭状态”的参考信息的组合来制作的数据集,学习料斗2内的铺路材料的状态与料斗2的打开或关闭状态的关系性(料斗控制条件)。该学习工序可以在与沥青滚平机100经由无线通信连接的管理装置(机器学习装置)中执行。此时,将在管理装置(机器学习装置)中制作的学习完毕模型发送到沥青滚平机100。料斗控制部50b可以使用接收到的学习完毕模型求出与当前的料斗2内的铺路材料的状态对应的料斗2的优选的打开或关闭状态,控制料斗2,以成为其优选的打开或关闭状态。
105.本技术主张基于2020年3月27日申请的日本专利申请2020-059058号的优先权,该日本专利申请的全部内容通过参考援用于本技术中。
106.符号说明
107.1-牵引机,1bf-基底部,1fw-前表面,2-料斗,2b-推辊,2w-料斗翼,3-整平机,3a-调平臂,5-后轮,6-前轮,23-调平缸,24-料斗缸,25-整平机抬升缸,30-主整平机,31-伸缩整平机,40-侧板,41-伸缩犁板,42-整平机台阶,43-固定板,45-螺杆转速传感器,46-输送机进给速度传感器,47-行驶速度传感器,48-辅助存储装置,50-控制器,50a-空间识别部,50b-料斗控制部,51-螺杆控制装置,52-输送机控制装置,53-料斗控制装置,54-行驶控制装置,55-输出装置,55a-主监视器,55b-声音输出装置,55c-指示器,60-伸缩缸,100-沥青滚平机,200-自卸车,200b-载物台,cm-空间识别装置,cp-传送通道,cv-输送机,mp-中央部,op-入口,pm-铺路材料,sc-螺杆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1