具有带锁定阀的斜率稳定系统的四腿施工机械的制作方法
1.本技术大体上但不通过限制方式涉及用于施工机械的斜率控制系统和方法,所述施工机械例如是可用于去除或回收铺砌表面的冷铣刨机和旋转搅拌机。更具体地,本技术涉及用于调整用于此类机械的多腿式推进器的移动的斜率控制系统。
背景技术:
2.冷铣刨机可用于从诸如道路和停车场的表面去除旧的或退化的铺面。旋转搅拌机可用于回收旧或退化的铺面,以便在表面再利用。表面可能延伸越过不平的地形。因而,这些机械可包括用于调整机械和附接到机械上的旋转切割工具的竖直高度和倾斜的系统,以便例如在运输操作期间提供稳定的行驶并且在铣削操作期间控制切割深度和角度。
3.授予muir等人的题为“system and method for controlling stability of milling machines”的美国专利号9,956,842和授予mares的题为“hydraulic leveling selection circuit for a work machine”的公开号us 2007/0098494公开了用于道路作业的施工机械。
技术实现要素:
4.一种机械包括框架、多个地面接合单元、多个可竖直移动的腿部和液压系统。多个地面接合单元包括第一后地面接合单元和第二后地面接合单元。多个可竖直移动的腿部将多个地面接合单元中的一个连接到框架。多个可竖直移动的腿部包括连接到第一后地面接合单元的第一后腿部和连接到第二后地面接合单元的第二后腿部。液压系统控制多个可竖直移动的腿部中的每一个的高度。液压系统包括控制第一后腿部与第二后腿部之间的流体的流体回路;使流体进入和离开流体回路的负载保持阀;使流体进入和离开负载保持阀的控制阀,控制阀系统连接到加压液压流体源和流体储集器;控制流体沿第一方向从第一后腿部到第二后腿部的流动的第一锁定阀;控制流体沿第二方向从第二后腿部到第一后腿部的流动的第二锁定阀;配置成将第一后腿部连接到控制阀系统的第一浮动阀;以及配置成将第二后腿部连接到控制阀系统的第二浮动阀。
5.一种用于控制具有各自安装到液压提升装置的多个独立推进器的四腿施工机械的侧向斜率的方法可包括通过连接到高压源来调整多个独立推进器的第一后液压提升装置和第二后液压提升装置的高度;利用多个独立推进器横穿具有变化地形的地面;在流体回路中使第一后液压提升装置和第二后液压提升装置的单个高度浮动;激活定位于第一后液压提升装置与第二后液压提升装置之间的锁定阀以抑制第一后液压提升装置的活塞端的流出;以及激活定位于锁定阀与第二后液压提升装置之间的浮动阀以将第二后液压提升装置的活塞端连接到低压源。
附图说明
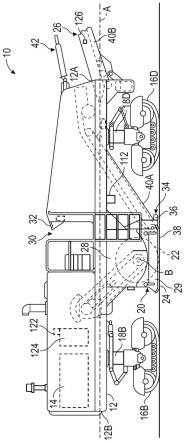
6.图1是冷铣刨机的示意性侧视图,其示出了铣削系统、防大块剥落系统、传送器系
统和安装到提升柱的多个运输装置。
7.图2是图1的冷铣刨机的控制系统的示意图,示出了与图1的提升柱的液压系统通信的控制器。
8.图3是图1和2的冷铣刨机的提升柱的液压系统的示意图,所述液压系统包括后液压回路,所述后液压回路包括配置成向左后提升柱和右后提升柱提供锁定能力和浮动能力的两个锁定阀和两个浮动阀。
9.图4是图1的冷铣刨机的示意性后视图,示出了围绕纵向轴线的旋转和冷铣刨机的重心。
10.图5是图1的冷铣刨机的示意性俯视图,示出了图4的冷铣刨机的重心的操作包络(operating envelope)。
11.图6是图3的液压系统的示意图,示为其中一个提升柱锁定并且一个提升柱浮动。
12.图7是图3的液压系统的示意图,示为其中一个锁定的提升柱升高并且另一个提升柱浮动。
13.图8是图3的液压系统的示意图,示为其中一个锁定的提升柱降低并且另一个提升柱浮动。
14.图9是示出使用后提升柱锁定阀和浮动阀来平衡冷铣刨机斜率的方法的框图。
具体实施方式
15.图1是冷铣刨机10的示意性侧视图,示出了框架12,动力源14可以安装到框架上以对运输装置(推进器)16b和16d供能,以引起冷铣刨机10的向前和向后移动。如图5所示,运输装置16a-16d可分别经由提升柱18a-18d连接到框架12。如参考图4所述,冷铣刨机10可具有重心(cg),重心可随着冷铣刨机10围绕纵向轴线la旋转而左右移动,例如,左右倾斜。如图5所示,重心(cg)可具有操作包络190,在操作包络中将安全移动,而冷铣刨机10没有翻倒或变得不稳定的风险或显著风险。图2的控制器100可配置成与图3的后液压回路148结合操作,以操作后提升柱18a和18b,以将操作包络190相比于常规四腿施工机械(其中后提升柱的操作彼此绑定)加宽直至图5的构造。在本公开中,后液压回路148可包括锁定阀128a-128b和浮动阀129a-129b(图3),以允许后提升柱18a和18b相对于彼此锁定,以增强冷铣刨机10的稳定性,同时维持升降能力和浮动能力。尽管本技术参考锁定阀128a和128b和浮动阀129a和129b应用于后提升柱而撰写,但在其它实例中,冷铣刨机10可配置成使得前提升柱18c和18d配置成一起浮动并且使用阀128a-129b,而后提升柱18a和18b可独立地受控制。
16.铣削组件20可例如联接到运输装置16a-16d之间的框架12的下侧。尽管参照了包括铣削滚筒和传送器的冷铣刨机来描述本公开,但本技术的系统和方法可适用于安装在诸如旋转搅拌机的可独立铰接的运输装置上的其它类型的机械。
17.框架12可沿框架轴线a在第一端12a与第二端12b之间沿纵向延伸。动力源14可以任何数量的不同形式提供,包括但不限于内燃机、奥托循环和柴油循环内燃机、电动机、混合动力发动机等。来自动力源14的动力可传输到机械10的各种部件和系统,如运输装置16a-16d和铣削组件20。
18.框架12可经由提升柱18a-18d由运输装置16a-16d支承。运输装置16a-16d可为允许冷铣刨机10在地面(铺砌道路或已经由冷铣刨机10处理的地面)上方移动或推进的任何
种类的地面接合装置,例如,推进器。例如,在所示实例中,运输装置16a-16d配置为履带组件或履带牵引装置。然而,在其它实例中,运输装置16a-16d可配置为轮,如可充气轮胎。运输装置16a-16d可配置成在轴线a的方向上沿着地面以向前和向后的方向移动冷铣刨机10。提升柱18a-18d可配置成相对于运输装置16a-16d和地面升高和降低框架12。提升柱18a-18d可配置成例如基于操作者输入而旋转以为冷铣刨机10提供转向。
19.冷铣刨机10可包括四个运输装置:左前运输装置16c(图5)、右前运输装置16d(图1)、左后运输装置16a(图5)和右后运输装置16b(图1),其中每一个可分别连接到提升柱18a-18d中的一个。也就是说,两个附加的运输装置16a和16c可提供成与图1所示的两个运输装置16b和16d对准进一步进入图1的平面,如图4和图5中可见。尽管如此,本公开不限于任何特定数量的运输装置。提升柱18a-18d可提供成升高和降低框架12,以例如控制铣削滚筒22的切割深度,并且适应接合地面上的障碍物的冷铣刨机10。如本文所述,提升柱18a-18d可联接到液压系统,如图2的液压系统114,其可由控制器132操作,该控制器接收来自传送器传感器126、斜率传感器112、储罐传感器122以及锁定阀128a-128b和浮动阀129a-129b(图3)或其组合的反馈,如图2和3所示。
20.冷铣刨机10还可包括连接到框架12的铣削组件20。铣削组件20可包括可操作地连接到动力源14的可旋转的铣削滚筒22。铣削滚筒22可包括设置在其上的多个切割工具,如凿子。铣削滚筒22可围绕滚筒或壳体轴线b旋转,所述轴线b在垂直于框架轴线a的方向上延伸到图1的平面中。当可旋转的铣削滚筒22围绕滚筒轴线b自旋或旋转时,切割工具可以接合作业表面24,例如现有道路、桥梁、停车场等的沥青和混凝土。此外,当切割工具接合此类作业表面24时,切割工具移除形成作业表面的材料层,如硬化泥土、岩石或铺面。然后,可旋转滚筒22和切割工具的自旋动作将作业表面24的材料传递到传送器系统26。
21.铣削组件20还可包括滚筒壳体28,其形成用于容纳铣削滚筒22的室。滚筒壳体28可包括前壁和后壁以及位于铣削滚筒22上方的顶盖。此外,滚筒壳体28可包括相对于冷铣刨机10的行进方向在铣削滚筒22的左侧和右侧上的侧向盖或侧板29。滚筒壳体28可朝向地面开放,使得铣削滚筒22可从滚筒壳体28接合地面。此外,滚筒壳体28可从框架12移除以进行维护、维修和运输。
22.在适用于旋转搅拌机的实施例中,滚筒壳体28可构造成容纳铣削滚筒22并形成混合室。这样,铣削滚筒22可构造成在机械行进期间接触作业表面,以回收和/或粉碎作业表面,如通过将回收的土壤或铺砌材料与沉积在作业表面上的各种添加剂或聚集体混合。因此,本技术的旋转搅拌机可包括用于在回收或粉碎操作期间在作业表面上沉积添加剂如波特兰水泥、石灰、飞灰、水泥灰尘等的系统。在实例中,冷铣刨机10可包括流体分配系统,所述流体分配系统连接到储罐124以用于将储罐124内的流体分配到滚筒壳体28或分配到滚筒壳体28前方或后方的地面上。储罐传感器122可与储罐124流体连通以例如感测储罐124中的流体液位。储罐124内的流体液位可影响冷铣刨机10的重心(cg)。储罐124可在大气压下加压。在另外的实例中,储罐124可包括用于将燃料提供到动力源14的燃料储罐,并且储罐传感器122可用于感测储罐124内的燃料液位。
23.冷铣刨机10还可包括操作者站或平台30,其包括控制面板32,以用于将命令输入到控制系统100(图2)以用于控制冷铣刨机10,以及输出与冷铣刨机10的操作有关的信息。因而,冷铣刨机10的操作者可从平台30执行冷铣刨机10的控制和监测功能,如通过观察位
于冷铣刨机10上的传感器(如传送器传感器126、斜率传感器112和储罐传感器122)输出的各种数据,以及锁定阀128a-128b和浮动阀129a-129b的输出。例如,控制面板32可包括用于操作与提升柱18a-18d相关联的运输装置16a-16d和液压系统114(图2)的控制器。控制面板32还可配置成发出命令至锁定阀128a-128b和浮动阀129a-129b,如以通过通电和断电等来切换阀位置和切换阀操作。
24.防大块剥落系统34可联接到滚筒壳体28,并且可包括延伸横跨切割室的前侧的向上定向的基板(图1中不可见),用于推动位于作业表面24上的松散材料的向前突出的犁36,以及多个滑块38。
25.传送器系统26可包括主传送器40a和副传送器40b。主传送器40a可定位在铣削滚筒22前方并且可联接到防大块剥落系统34的基板并支承在所述基板上。主传送器40a可将经由铣削滚筒22从作业表面24切下的材料供给到突出到框架端部12a前方的副传送器40b。定位机构42可联接到副传送器40b,以实现副传送器40b的左、右、向上和向下的位置控制。传送器传感器126可以由控制器132使用以操作定位机构42以调整副传送器40b的位置。传送器传感器126可用于感测副传送器40b相对于例如框架12的位置。副传送器40b可将移除的作业表面24沉积到容置部(例如自卸卡车的箱)中。在诸如旋转搅拌机实施例的其它施工机械中,传送器40a和40b可以省略。
26.冷铣刨机10以及诸如旋转搅拌机的其它示例性道路施工机械可包括附图中未示出的其它构件,其在本文中未进一步详细描述。例如,冷铣刨机10还可包括燃料箱、冷却系统、铣削流体喷洒系统、各种类型的电路等。
27.冷铣刨机10可在作业表面24上方行驶,使得前运输装置16c和16d在作业表面24上方滚动。冷铣刨机10可配置成从道路移除作业表面24以留下铣刨表面。后运输装置16a和16b可在铣刨表面上滚动,其中铣削组件20在作业表面24的铣削和未铣削表面之间产生作业表面24的材料的边缘。铣削表面可包括已经完全去除铺面材料的表面,或已经去除铺砌材料的最上层的铺砌材料的表面,或包含通过铣削组件20混合的材料的表面。斜率传感器112可用于监测铣削滚筒22的切割和框架12的定向。
28.冷铣刨机10可配置成在前向方向(参照图1从左到右)行进,以移除作业表面24。防大块剥落系统34可在作业表面24的顶部上行进,以防止或禁止作业表面24在去除作业表面24的操作期间过早地移除。铣削滚筒22可遵循防大块剥落系统34以接合作业表面24。铣削滚筒22可构造成参照图1逆时针旋转,使得可通过铣削滚筒22的切割齿或凿子来提升作业表面24的材料并将其破碎成小块。防大块剥落系统34可构造成在滚筒壳体28内容纳作业表面24的碎片。去除的作业表面24的碎片可由主传送器40a向上推,并且例如通过环形带向前传送到副传送器40b。副传送器40b可在前框架端12a的前方悬置,以放置在收集容器上,如自卸卡车的箱。因而,副传送器40b的从左到右位置、副传送器40b的上下定向以及副传送器40b上的材料存在可影响冷铣刨机10的重心(cg)的位置。
29.在作业表面24上方移动的过程期间,随着铣削滚筒22在操作模式中接合作业表面24,或者随着铣削滚筒22回缩到运输模式,运输装置16a-16d可能遇到由运输装置16a-16d碾过的障碍,如山丘、斜坡、下降、凹陷或突起。这些障碍可引起提升柱18a-18d的杆或活塞向内推入提升柱18a-18d的缸中或从缸进一步向外延伸。取决于操作模式,这可能引起提升柱18a
–
18d中的一个、两个或更多个实际上移动,而其它则被锁定。有时,这些移动可能潜在
干扰铣削滚筒22产生的切割。此外,这些障碍物中的一些可影响冷铣刨机10的重心(cg)的位置,从而影响冷铣刨机10的稳定性。在切割模式中,在铣削滚筒22降低以接合工作表面24,并且前提升柱18c和18d锁定在适当位置中的情况下,这些移动可能特别不稳定。如下文所论述,一起浮动的后提升柱可以使冷铣刨机10的重心(cg)的操作包络190的后部部分(图5)变窄。
30.本技术涉及用于监测和控制提升柱18a-18d的移动的系统和方法,以例如维持框架12的定向、维持期望的切割特性并且维持冷铣刨机10的稳定性。在特定实例中,提升柱18a和18b的液压系统可设有锁定阀128a-128b和浮动阀129a-129b(图3),以例如基于操作者输入来控制和限制冷铣刨机10的后提升柱18a和18b的操作,如以侧向斜率的切割操作期间,如图4中所示。在其它实例中,来自储罐传感器122、传送器传感器126和斜率传感器112的一个或多个输出可用于通过引起锁定阀128a-128b和浮动阀129a-129b与操作者交互或自动地与控制系统100的操作一起操作来维持、限制或改变框架12和冷铣刨机10的定向。如下文所论述,尤其与常规的后提升柱液压回路(其中左提升柱和右提升柱的操作在所有操作状态中绑定在一起)相比,锁定阀128a-128b和浮动阀129a-129b的操作可以增加(例如,加宽)冷铣刨机10的重心(cg)的操作包络190,如图5中所示。
31.图2是用于冷铣刨机10的控制系统100的图示。冷铣刨机10的控制可由冷铣刨机10的一个或多个嵌入式或集成控制器132管理。控制器132可包括一个或多个处理器、微处理器、微控制器、电子控制模块(ecm)、电子控制单元(ecu),或用于电子控制冷铣刨机10的功能的任何其它合适的装置。
32.控制器132可配置成基于冷铣刨机10的各种操作条件,基于例如传送器传感器126、储罐传感器122和斜率传感器112的输出以及其它传感器和操作者输入来根据预定算法或用于控制冷铣刨机10的指令集进行操作。在实例中,控制器132可执行存储在数据库134的存储器中的指令,以用于执行参照图9所述的方法。此算法或指令集可存储在数据库134中,并且可读入控制器132的机载存储器中,或预编程到可由控制器132访问存储介质或存储器上,例如,呈软盘、硬盘驱动器、光介质、随机存取存储器(ram)、只读存储器(rom)或本领域中常用的任何其它合适的计算机可读存储介质(分别称作“数据库”)的形式。
33.控制器132可电连通或连接到驱动组件136等,以及冷铣刨机10的各种其它部件、系统或子系统。驱动组件136可包括发动机或液压电动机以及其它元件(如图1的动力源14)。通过此类连接,控制器132可从操作者界面132和各种传感器(如传送器传感器126、斜率传感器112和储罐传感器122等)接收与冷铣刨机10的当前操作参数相关的数据。响应于此输入,控制器132可执行各种确定并且发射对应于此类确定的结果或对应于需要执行的动作的输出信号,如用于使用地面接合单元(如图5的运输装置16a-16d)产生前向和后向移动,或产生提升柱18a-18d的向上和向下移动。
34.包括操作者界面138的控制器132可包括各种输出装置,如可用于显示关于冷铣刨机10的状态的信息、警告、数据(例如文本、数字、图形、图标等)的屏幕,视频显示器,监视器等。包括操作者界面138的控制器132还可包括用于从与冷铣刨机10相关联的各种开关和传感器接收信息和命令信号的多个输入接口,以及用于将控制信号发送到与冷铣刨机10相关联的各种致动器的多个输出接口。如本领域熟知的,适当地编程的控制器132可提供许多另外的类似或完全不同的功能。
35.关于输入,控制器132可从操作者界面138(如在图1的控制面板32处)、斜率传感器112、传送器传感器126、储罐传感器122、侧板传感器140等接收信号或数据。如在图2中所示的实例中可见,控制器132可从操作者界面138接收信号。由控制器132从操作者界面138接收的此类信号可包括但不限于所有腿部升高信号和所有腿部降低信号,其中所有提升柱18a-18d被命令升高或降低以增大或减小机械的高度和相关联的切割深度。在一些实施例中,可直接独立控制前提升柱18c和18d,而后提升柱18a和18b可基于前腿部的移动间接地一起控制。确切地说,可以使用图3的控制阀149和负载保持阀151以及锁定阀128a-128b和浮动阀129a-129b控制后提升柱18a和18b。控制器132可以从储罐传感器122(例如液体或流体液位)和传送器传感器126(如副传送器40b的角位置和高程)接收信息。控制器132还可从一个或多个侧板传感器140接收数据。此类数据可包括但不限于与侧板29的竖直位置相关的信息和/或侧板29是否与表面102接触。
36.控制器132还可从其它控制器、冷铣刨机10的坡度和斜率系统142、操作者界面138等接收数据。在实例中,另一控制器可向控制器132提供关于冷铣刨机10的操作状态的信息。在其它实例中,此类信息可由坡度和斜率系统142等等提供到控制器132。所接收的操作状态可包括冷铣刨机10是处于非铣削操作状态还是铣削操作状态(例如,铣削滚筒22未自旋或正自旋)。
37.在实例中,坡度和斜率系统142可从操作者界面138接收并处理与操作者期望的切割深度、切割的斜率等有关的数据。坡度和斜率系统142可包括一个或多个斜率传感器112。斜率传感器112可以检测沿着纵向轴线la和横向于纵向轴线la的横向轴线ta的旋转(图4)。
38.控制器132还可从坡度和斜率系统142接收关于机械的操作状态的数据,如从斜率传感器112或操作者界面138。接收的操作状态可包括冷铣刨机10是否处于铣削操作状态。控制器132和/或坡度和斜率系统142还可向控制器132提供关于切割的坡度(切割的深度)和斜率的信息。
39.如本文中所论述,冷铣刨机10的稳定性可以与提升柱18a-18d的状态有关,例如每个的液压活塞相对于缸延伸的长度和冷铣刨机10所位于的地形的斜率。图5从俯视图分别示出了附接到推进器16a-16d的提升柱18a-18d。控制器132可以基于传感器输入和操作者输入维持液压系统114的操作,以例如维持冷铣刨机10的稳定操作。在实例中,控制器132可操作液压系统114以将冷铣刨机10的重心(cg)维持在操作包络190(图5)内,这将防止冷铣刨机10倾倒。在实例中,液压系统114可配置成经由锁定阀128a-128b和浮动阀129a-129b(图3),基于其中使用的液压流体的压力在操作包络190内自调节重心(cg)。例如,可以操作锁定阀128a-128b和浮动阀129a-129b以防止框架12倾斜超过可能将重心(cg)定位在操作包络190之外的各种角度。在实例中,液压系统114可以基于经由操作者接口138输入到控制器132中的冷铣刨机10的操作设置来控制框架12的定向。具体而言,液压系统114可以进入铣削滚筒22正在操作的切割模式。在这种状态下,液压系统114可以通过控制提升柱18a-18d的高度或长度来控制冷铣刨机10的侧向倾斜。
40.前提升柱18c和18d的独立高度可以独立地控制,如通过设置铣削滚筒22的切割深度和角度。液压缸150a和150b(图3)处的后提升柱18a和18b的独立高度可基于提升柱18c和18d的独立高度而共同控制。也就是说,提升柱18a和18b一起的高度可设定为遵循提升柱18c和18d的高度。因而,控制阀149和负载保持阀151a可由操作者(如经由控制器132)控制
以例如控制切割的深度或切割的斜率。在另外的实例中,控制阀149和负载保持阀151a可基于操作者输入而经由控制器132自动地控制。另外,锁定阀128a-128b和浮动阀129a-129b可被自动控制、由控制器132控制或被手动控制,以调整或锁定提升柱18a和18b的长度,以维持或改进冷铣刨机10的稳定性,同时还保持升降能力和浮动能力。
41.后提升柱18a和18b的高度或长度可以一起受控制,并且可以配置成基于前提升柱18c和18d的定向浮动。因此,前提升柱18a和18b中的一个可配置成在横穿不平地形时向上移动,而另一个配置成向下移动成比例量,或反之亦然。前提升柱18c和18d通常可由操作者操作,并且大体上通过直接用户界面而防止延伸或缩回太远。然而,由于后提升柱18a和18b在浮动操作中绑定在一起,因此它们可能引起提升柱18a和18b中的一个延伸或缩回比期望的更大的量。具体而言,如果冷铣刨机10向右侧或左侧偏斜太远,则提升柱在冷铣刨机10偏斜的方向上可能收缩太多,从而引起机械10的重心(cg)移动到操作包络190之外,并且从而引起机械10变得不稳定。
42.本公开涉及限制后提升柱18a和18b的移动,以防止重心(cg)移动到操作包络190之外。如图5中所示,本公开的操作包络190可以由上边界192、下边界194、左边界196a和右边界198a限定。如果提升柱18a-18d中的每一个可独立地控制(例如,可独立地锁定),则操作包络将如同提升柱18c和18d与提升柱18a和18b分开的一样高,并且与提升柱18c和18a与提升柱18d和18b分开的一样宽。然而,在常规的四腿施工机械中,后提升柱或有时前提升柱的高度通常一起受控制,使得标称操作包络变成由边界197a、197b和192形成的等腰三角形,其中顶点位于提升柱18c、提升柱18d和提升柱18a和18b之间的中间的点199处。因此,操作包络的宽度将在后提升柱附近较窄。此类配置通常有助于确保16a-16d的所有四个同时与地面接触,即使表面并非完全平坦。然而,在本公开中,提升柱18a和18b的长度可在特定情境使用锁定阀128a-128b和浮动阀129a-129b独立地锁定,将操作包络的底部190移出到后提升柱18a和18b,从而将操作包络的底部的宽度从点增大到下边界194的宽度。标称操作包络从而从等腰三角形转换到近似直角三角形。注意,提升柱18a和18b的轮基可以不同于提升柱18c和18d的轮基,使得可能实际上不形成真正的直角三角形。因此,在左后提升柱18a锁定的情况下,操作包络190可由上边界192、左边界196a和右边界196b限定,并且在右后提升柱18b锁定的情况下,操作包络190可由上边界192、右边界198a和左边界198b限定。如图4所示,当叠加在一起时,冷铣刨机10有更多的自由度左右倾斜,而重心(cg)不移动到操作包络190之外。
43.锁定阀128a-128b和浮动阀129a-129b(图3)可用于限制后提升柱18a和18b中的一个的移动,同时维持所述提升柱的升降能力,并且继续允许另一提升柱浮动。确切地说,锁定阀128a和128b可用于锁定提升柱18a和18b中的一个,而浮动阀129a和129b中的一个可用于允许另一提升柱浮动,以例如保持与地形(如工作表面24)接合。另外,可以操作锁定阀128a和128b以升高或降低锁定(例如,非浮动)的提升柱。锁定阀128a-128b和浮动阀129a-129b的操作可以基于直接操作者接合来手动启动,或由控制器132使用来自斜率传感器112、储罐传感器122和传送器传感器126或其它传感器的一个或多个输入来自动启动。储罐传感器122可感测储罐124内可影响冷铣刨机10的重心(cg)的流体液位。例如,储罐124可以偏心位于框架12上(例如,进一步向左或向右,以适应沿着机械一侧的齐平切割),使得随着储罐124内的流体耗尽,冷铣刨机10的重心(cg)可以改变。因此,控制器132可以从储罐传感
器122接收数据,以便于在考虑储罐124的重量影响的情况下确定机械10的重心(cg)。控制器132还可以从传送器传感器126接收数据,如,副传送器40b的从左到右角度和副传送器40b的高程位置。随着副传送器40b移动,特别是从左到右移动,副传送器40b的重量以及副传送器40b中或上的材料的重量可影响冷铣刨机10的重心(cg)。因此,控制器132可以从传送器传感器126接收数据,以便于在考虑副传送器40b的影响的情况下确定机械10的重心(cg)。数据库134可以设有关于储罐124内的流体液位如何影响或定位操作包络190内的冷铣刨机10的重心(cg)的信息。数据库134可设有关于副传送器40b的位置如何影响冷铣刨机10的重心(cg)的信息。因而,如下文所论述,后提升柱18a和18b的操作可基于控制器132使用例如传感器输入或操作者输入的操作而控制。
44.图3是包括一对锁定阀128a-128b和一对浮动阀129a-129b的冷铣刨机10的后提升柱18a和18b的后液压回路148的示意图。后液压回路148可包括用于控制提升柱18a和18b的液压系统114的子系统,其中液压系统114可以控制冷铣刨机10的提升柱18a-18d中的所有提升柱。液压回路148可包括液压缸150a和150b,所述液压缸可包括左后提升柱18a和右后提升柱18b。液压系统148可进一步包括负载保持阀151a。负载保持阀151a可与控制阀149通信,所述控制阀可包括在液压回路148与液压系统114的其余部分(例如,配置成控制前提升柱18c和18d的部分)之间的流动。控制阀149还可与浮动压力阀151b通信,所述浮动压力阀可与低压供应阀151c联接。控制阀149、浮动压力阀151b和低压供应阀151c可包括控制阀系统。
45.液压缸150a和150b可包括壳体152a和152b和分别在壳体中可滑动地定位的活塞组件154a和154b。壳体152a和152b中的每一个可包括中空开孔内部,并且每个活塞组件154a和154b可包括分别构造成紧密配合在开孔内的缸活塞156a和156b,以及可操作地连接到缸活塞156a和156b的活塞杆158a和158b。活塞组件154a和154b可将其相应的缸壳体152a和152b分成上室或开孔端160a和160b和下室或杆端162a和162b。上室160a和160d可包括出口164a和164a,出口可以将加压液压流体(如从压力件184)引导出或引导入上室160a和160b。下室162a和162b可包括出口166a和166b,以允许液压流体与储罐182连接。压力传感器可以位于出口164a和164b以及出口166a和166b中的一个或多个处,以便向控制器132提供压力输出数据,例如,以确定机械10的cg的位置和/或启动如本文中所描述的一个或多个阀128a-129b的操作。
46.液压缸150a的上室160a的出口164a可经由管线170a-170f连接到液压缸150b的上室160b的出口164b。管线170a可以将上室160a与浮动阀129a连接。管线170b可以将上室160b与浮动阀129b连接。管线170c可以将浮动阀129a与锁定阀128b连接。管线170d可以将浮动阀129b与锁定阀128a连接。管线170e可以连接锁定阀128b和锁定阀128a。下室162a可经由管线172连接到下室162b。
47.浮动压力阀151b可经由管线174a连接到低压供应阀151c。浮动压力阀151b可经由管线174b和管线174c连接到浮动阀129a。浮动压力阀151b可经由管线174b连接到浮动阀129b。低压供应阀151c可经由管线174d连接到压力件184。低压供应阀151c可经由管线174e连接到储罐182。
48.负载保持阀151a可经由管线176a连接到控制阀149,并且经由管线176b连接到缸150a和150b。负载保持阀151a和控制阀149可以经由管线178a彼此连接。
49.锁定阀128a和128b可包括双通阀,双通阀可以在打开位置与关闭位置之间切换,在打开位置,自由地允许通过双通阀的双向流动(自由流动配置),而在关闭位置,止回阀仅允许单向流动(止回流动配置)。当未激活或未通电时,锁定阀128a和128b可以默认在关闭位置。
50.浮动压力阀151b可以类似于阀128a和128b配置。低压供应阀151c可包括减压释放阀。控制阀149可包括具有第一配置、第二配置和第三配置的三位阀,所述第一配置允许两种不同流体穿过第一源和第二源(例如,高压流体进入和低压流体流出),所述第二配置被配置成将两种不同流体连接到相同源(例如,流体储罐),而所述第三配置被配置成允许两种不同流体连接到第二源和第一源(例如,与第一配置相反的配置)。
51.浮动阀129a和129b可包括双通阀,其可在将上室160a和160b连接到不同流体管线的位置之间切换。在默认断电模式中,浮动阀129a和129b可将上室160a和160b分别连接到锁定阀128b和128a(第一方向流动配置)。在通电模式中,浮动阀129a和129b可将上室160a和160b连接到浮动压力阀151b(第二方向流配置)。
52.如图3中所示,在冷铣刨机10的正常操作期间,可以操作控制阀149以允许期望量的流体进入后液压回路148中。在正常操作期间,锁定阀128a和128b可以通电至接通或打开状态,在接通或打开状态,允许流体流通过其中,并且浮动阀129a和129b可以在默认位置断电以将上室160a和160b彼此连接。浮动压力阀151b也可在默认关闭位置断电。
53.可以操作控制阀149以执行“腿部升高”和“腿部降低”操作,其中所有提升柱18a-18d(腿部)从它们相应的缸延伸或缩回到相应的缸中,以控制框架12在地面上方的高度,以及机械的从左到右的斜率,以控制铣削滚筒22的切割角度。因此,在负载保持阀151a打开的情况下,控制阀149可以经由与压力件184(例如,泵)的联接将附加液压流体推入管线170a-170e中,或者可以通过连接到储罐182(例如,液压流体储集器)而允许液压流体从后液压回路148排出。在后液压回路148调整到期望流体液位之后,负载保持阀151a可例如通过用户输入关闭以防止液压流体离开后液压回路148。确切地说,液压流体不可离开上室160a和160b之间的流动空间,并且液压流体不可离开下室162a和162b之间的流动空间。因而,液压流体只能以分布方式围绕后液压回路148移动。确切地说,随着运输装置16a-16d(图5)横穿地形,缸150a和150b将同等地定位在水平地面上,使得力f1和力f2大致相等。然而,如果缸150a和150b中的一个延伸,则另一个将缩回。因此,如果冷铣刨机10在图3中向左倾斜,则活塞组件154a将趋于缩回,而活塞组件154b将趋于延伸。因此,液压流体将经由管线170a-170e从上室160a移动到上室160b,并且经由管线172从下室162b移动到下室162a。锁定阀128a和128b可以通电到打开状态以允许流体流过其中。在液压流体重新分配到上室160b之前,上室160a中的压力将暂时升高。同样,在液压流体重新分配到下室162a之前,下室162b中的压力将暂时升高。
54.如本文中所论述,锁定阀128a和128b可用于限制流体在液压缸150a和150b之间的流动,如当负载保持阀151a关闭时。浮动阀129a和129b可用于允许非锁定的腿部浮动。锁定阀128a和128b以及控制阀149还可用于升高和降低锁定的腿部。
55.图6示出了工作表面24向下倾斜到左侧使得提升柱18a低于提升柱18b的情形。因此,抵靠活塞组件154a推动的力f1将大于抵靠活塞组件154b推动的力f2。在冷铣刨机10向左侧偏斜的情形下,锁定阀128a和128b可以断电以限制通过其中的流动,并且浮动阀129b
可以通电。锁定阀128a和128b充当止回阀,其中锁定阀128b允许向右侧流动,但锁定阀128a不允许。(相反,在相反情形下,锁定阀128a允许向左侧流动,但锁定阀128b不利于提升柱18b的锁定。)因而,由于锁定阀128a不允许流体在图6向右流动,故流体不可离开上室160a。因此,在活塞组件154a处添加力f1将不会迫使任何额外流体离开上室160a。下室162b继续经由管线172和178a连接到储罐182。然而,提升缸150b经由浮动阀129b的激活而变为连接到浮动压力阀151b和低压供应阀151c。因此,浮动阀129b可以被激活,使得上室160b通过管线174b连接到浮动压力阀151b。浮动压力阀151b可被激活以打开并连接到低压供应阀151c,所述低压供应阀可通过连接到压力件184将加压流体提供到上室160b。然而,压力件184的全部压力p1可通过低压供应阀151c使一部分流体从压力件184返回到储罐182而减小到p2。低压供应阀151c和浮动压力阀151b可包括低压源,而压力件184可包括高压源(例如,大于低压源)。因此,浮动压力阀151b仅接收压力件184的压力p1的一部分。下室162b可经由管线178a和控制阀149连接到储罐。即使提升柱18a锁定在特定高度,提升柱18b也可以通过由小于压力件184的压力p1的压力p2延伸而浮动。因此,当运输装置16b从表面24脱离时,如当横穿凹陷时,压力p2可以提供足够的力以延伸提升柱18b以使运输装置16b与表面24重新接合。低压p2可以足以延伸提升柱18b,使得运输装置16b能够接合地形并且增加牵引力,但不足以引起提升柱18b提升框架12。类似地,由于压力p2配置成仅强到足以延伸提升柱18b以接合表面24,故运输装置16b可在接合表面24中的突起时缩回,以提供一定程度的牵引力。
56.提升柱18a的锁定将操作包络190的左下角(图5)移动到提升柱18a的位置,与提升柱18a和18b一起浮动时相比,将操作包络190向左加宽。锁定阀128b和浮动阀129b可配置成以相同方式操作,以当冷铣刨机10向右侧偏斜时限制提升柱18a的移动并且使提升柱18a浮动。
57.如图7中所示,当左提升柱18a锁定并且右提升柱18b浮动时,后液压回路148还可执行“腿部升高”命令。从图6的配置,左提升柱18a可配置成独立于提升柱18b升高。因此,控制阀149可配置成经由管线176a将压力件184连接到负载保持阀151a,负载保持阀151a可移动以经由管线170f将管线176a连接到锁定阀128b,并且锁定阀128b可移动以经由管线170c将管线170f连接到上室160a。因此,上室160a可以连接到压力件184,其中锁定阀128b移动到流通状态。控制阀149的移动还可经由管线178a和管线172a将储罐182连接到下室162a。因此,随着压力件184将在p1下的高压液压流体引入上室160a中,下室162a中的低压液压流体可经由管线172和管线178a释放到储罐182。提升柱18b可经由同时将下室162b连接到储罐182的控制阀149继续在浮动模式中操作,其中浮动压力阀151b和低压供应阀151c连接到上室160b。
58.如图8中所示,当左提升柱18a锁定并且右提升柱18b浮动时,后液压回路148还可执行“腿部降低”命令。为了降低提升柱18a,可将阀128a、128b、129a和129b返回到图6的配置,使得阀128a和128b通电到关闭位置,并且阀129a和129b将上室160a和160b与阀128a和128b连接。此后,可以移动控制阀149以将储罐182连接到管线176a,因此允许上室160a内的流体离开上室160a并且通过阀129a和阀128b进入管线176a。在腿部降低模式中,负载保持阀151a可以允许流动通过其中。提升柱18b可经由同时将下室162b连接到储罐182的控制阀149继续在浮动模式中操作,其中浮动压力阀151b和低压供应阀151c连接到上室160b。
59.在实例中,系统100可配置为基于来自冷铣刨机10的各种传感器(如传送器传感器126、储罐传感器122和斜率传感器112)中的一个或组合的输入来调整框架12的定向。在另外的实例中,控制器132可以配置成检测(经由集成压力传感器)与冷铣刨机10正在横穿的表面(如表面24)的地形变化相关联的锁定阀128a和128b和/或浮动阀129a和129b处的液压缸150a和150b中的压力变化。例如,随着运输装置16a或16b中的一个接合表面24中的凸起或表面24中的凹陷,或冷铣刨机10横穿侧向横向斜坡,相关联的压力尖峰或压降分别可随相关联的液压缸150a-150d出现。控制器132可以响应于一个提升柱18a和18b处的压力变化(直接感测或者经由通过储罐传感器122和传送器传感器126的代理确定)引起一个或多个其它锁定阀128a和128b和浮动阀129a和129b激活,以防止提升柱18a和18b中的一个或多个改变高度,如防止框架12将定向改为重心(cg)超出操作包络190的点。另外,冷铣刨机10的操作者可例如经由操作者界面138手动地接收来自控制器132的信息,并且手动调整锁定阀128a和128b和浮动阀129a和129b。
60.系统100可包括设置于框架12上的斜率传感器112。在实例中,斜率传感器112可定位在框架12的纵向中心和横向中心附近。斜率传感器112可配置成生成指示冷铣刨机10的斜率的信号。如图4中所示,冷铣刨机10的斜率可相对于框架12围绕在机械10的行进方向上延伸的纵向轴线la(图4)(可与图1的轴线a重合),以及垂直于纵向轴线la的在机械10上从左到右延伸的横向轴线ta的移动限定。冷铣刨机10的斜率可相对于冷铣刨机10的移动并相对于垂直于冷铣刨机10的重力f方向的水平面p来限定。重力f可对应于冷铣刨机10的重量在其重心cg朝向地面102(如图1的作业表面24的顶部)引起的力。水平平面p在下文中称为参考平面p。引起重心(cg)移动到操作包络190之外的机械10的倾斜可包括机械10的阈值定向,在所述阈值定向处可以触发锁定阀128a-128b和浮动阀129a-129b。机械10的阈值定向(包括储罐124中的各种液位和副传送器40b的定向)可以基于例如预定计算存储在数据库134中。
61.在所示实例中,如图1中所示,斜率传感器112位于前运输装置16c和16d与后运输装置16a和16b之间的框架12上。另外,斜率传感器112可分别位于左运输装置16c和16a与右运输装置16d和16b之间。在另外的实例中,斜率传感器112可围绕由冷铣刨机10的纵向轴线la和ta横向轴线限定的相交位置设置在框架12上。在其它实例中,斜率传感器112可设置在框架12中的任何位置处,以生成指示冷铣刨机10的斜率的信号。在另外的实例中,多个斜率传感器112可设置在冷铣刨机10的框架12中或上的各个位置处。
62.在实例中,斜率传感器112可包括用于感测沿横轴线ta和纵轴线la的移动的双轴传感器。在附加实例中,斜率传感器112可包括陀螺仪传感器。陀螺仪传感器可配置为当冷铣刨机10横越具有变化的地形特征(例如隆起物、丘陵、凸起、障碍物、凹陷)的地形时,产生指示冷铣刨机10的旋转属性(例如俯仰和横滚)的信号,从而引起框架12围绕轴线ta和la的定向的变化。俯仰可对应于冷铣刨机10围绕横轴线ta的移动,并且横滚可对应于冷铣刨机10围绕纵轴线la的移动。在各种实例中,斜率传感器112可包括传感器装置、角度测量装置、力平衡构件、固态构件、流体填充装置、加速计、倾斜开关或可确定冷铣刨机械10相对于各种参考参数中的一个或多个的斜率的任何其它装置,所述参考参数包括但不限于参考平面p、地面102、冷铣刨机10的纵向轴线la和横向轴线ta。
63.控制器132可与斜率传感器112、储罐传感器122和传送器传感器126通信。控制器
132可配置为接收由斜率传感器112生成的信号,该信号指示冷铣刨机10围绕纵轴线la及其横轴线ta的斜率。控制器132可配置成从储罐传感器122接收指示储罐124的填充水平的信号。控制器132可以配置成接收由传送器传感器126生成的指示副传送器40b相对于框架12的位置的信号。控制器132可设置于控制面板32处,但可设置于框架12上的任何位置上。
64.控制器132可进一步配置成与液压系统114通信,以控制提升柱18a-18d的操作和位置。在实例中,液压系统114可包括用于容纳液压流体的储集器(例如,储罐182)和一个或多个泵(例如,压力件184),以将由液压流体生成的压力传送到提升柱18a-18d和运输装置16c-16d。控制阀149和负载保持阀151a(图3)可设置在液压系统114中以控制液压流体流入和流出后液压回路148的方向。此外,诸如止回阀、泄压阀、压力调节阀等的附加控制阀可设置在液压系统114中以生成用于致动前提升柱18c和18d和运输装置16a-16d所需的液压动力。因此,与控制器132通信的液压系统114可配置成基于从控制器132接收的输入来致动提升柱18a-18d。同样,控制面板32可包括操作者输入以通过控制器132控制液压系统114。另外,液压系统114或单独的液压系统可与运输装置16a-16d通信,以提供用于运输装置16的动力的液压流体,所述运输装置可另外由控制器132控制。
65.控制器132可配置成基于从斜率传感器112接收的信号确定冷铣刨机10的第一斜率s1。第一斜率s1是由冷铣刨机10的纵轴线la限定的第一角度。第一斜率s1进一步参考垂直于冷铣刨机10的重力f的参考平面p来限定。与斜率传感器112通信的控制器132可接收对应于冷铣刨机10围绕其纵轴线la移动的信号以确定第一斜率s1。在各种实例中,控制器132可基于参考参数确定第一斜率s1,参考参数包括冷铣刨机10围绕纵轴线la、参考平面p和地面102的移动。
66.控制器132可配置成基于从斜率传感器112接收的信号确定冷铣刨机10的第二斜率s2。第二斜率s2是由冷铣刨机10的横轴线ta限定的第一角度。参考垂直于冷铣刨机10的重力f的参考平面p进一步限定第二斜率s2。与斜率传感器112通信的控制器132可接收对应于冷铣刨机10围绕其横轴线ta移动的信号以确定第二斜率s2。在各种实例中,控制器132可基于参考参数确定第二斜率s2,所述参考参数包括冷铣刨机10围绕横轴线ta、参考平面p和地面102的移动。
67.控制器132可配置成基于来自储罐传感器122和传送器传感器126的输入来确定冷铣刨机10的重心(cg)中的移位。如所论述的,数据库134可包括将储罐124的填充水平与机械10的重心(cg)的变化和副传送器40b的位置与机械10的重心(cg)的变化相关联的信息。因此,来自储罐传感器122和传送器传感器126的输入可用于确定机械10的重心(cg)与操作包络190的接近程度,并且作为响应,可确定锁定阀128a-128b和浮动阀129a-129b是否可以被激活以及何时被激活以防止重心(cg)移动到操作包络190之外。
68.使用来自储罐传感器122、传送器传感器126和斜率传感器112中的一个或多个的输入,控制器132可以配置成移动锁定阀128a-128b和浮动阀129a-129b(如本文公开),以限制提升柱18a和18b中的一个或两个的移动,以限制第一斜率s1和第二斜率s2,以便维持框架12和冷铣刨机10的期望定向或姿态,例如超过阈值定向。可以基于存储在数据库134或控制器132的存储器模块中与重心(cg)和操作包络190有关的信息来确定框架12和冷铣刨机10的期望定向或姿态。因而,来自斜率传感器112、储罐传感器122和传送器传感器126中的一个或多个的数据可用于在采取动作之前或之后验证或确认来自斜率传感器112、储罐传
感器122和传送器传感器126中的其它的数据。例如,框架12的定向可从斜率传感器112读取并且与操作者输入定向进行比较。然后,可以操作锁定阀128a-128b和浮动阀129a-129b以限制提升柱18a和18b的移动以防止框架12将重心(cg)移动到操作包络190之外。来自储罐传感器122和传送器传感器126的信息可与来自斜率传感器112的信息进行比较以验证提升柱18a和18b的正确和准确的操作。在其它实例中,来自储罐传感器122和传送器传感器126的信息可用于验证锁定阀128a-128b和浮动阀129a-129b的操作。
69.在框架12移动到冷铣刨机10的重心(cg)回到操作包络190内的定向之后,可重置锁定阀128a-128b和浮动阀129a-129b以再次允许上室160a和160b与下室162a和162b之间的流体流。
70.控制器132可以从斜率传感器112、储罐传感器122和传送器传感器126获得信息,以实时致动锁定阀128a-128b和浮动阀129a-129b,以经由提升柱18a和18b限制冷铣刨机10的框架12的倾斜,以维持各种参数(如框架12或冷铣刨机10的优选或期望定向),这1)维持铣削滚筒22的期望切割定向[如相对于水平面在预定公差带内],如通过维持框架12相对于地面的地面倾斜,以及2)维持冷铣刨机10的稳定性,以及其它考虑因素。
[0071]
在各种实例中,机械10可以配置成仅包括锁定阀128a-128b和浮动阀129a-129b中的一个。在这种配置中,可以提供提升柱18a和18b中的仅一个的锁定。因此,可以仅在一个方向上防止机械10偏斜太远(例如,相对于操作包络)。这种配置可用于重心偏心的机械。例如,一些道路作业机械配置有铣削滚筒22,该铣削滚筒配置成与机械的侧面齐平切割。因而,其它部件可偏离中心,如流体储罐。
[0072]
图9是示出使用后提升柱锁定阀128a-128b和浮动阀129a-129b来平衡冷铣刨机10的方法200的框图。
[0073]
在步骤202,可以例如经由用户输入来设置提升柱18a到18d的高度。提升柱18c和18d的高度可以直接控制以例如确定铣削滚筒22的斜率角度和切割深度。
[0074]
在步骤204,提升柱18a和18b的高度可以基于切割深度一起控制,并且可以调整其相对高度以调整其斜率角度。例如,液压流体可以进入或离开后液压回路148以共同延伸或缩回提升柱18a和18b。在步骤204,锁定阀128a和128b可以通电打开以允许流体自由流过其中,并且浮动阀129a和129b可以分别保持在将上室160a和160b连接到锁定阀128a和128b的未通电默认状态。如所提及,尽管参考在步骤202处独立地操作前提升柱18c和12d以及在步骤204处一起操作后提升柱18a和18b来进行描述,但此类配置可相反,使得可操作阀和步骤206及其它以控制前提升柱。
[0075]
在步骤206,冷铣刨机10可跨越诸如作业表面24的地形行驶。地形可能不平,并且可能引起冷铣刨机10向左倾斜或向右倾斜,从而将机械10的重心(cg)朝向操作包络190的外边缘移动。例如,前提升柱18c和18d可以锁定在适当位置以固定铣削滚筒22的切割平面,这可能引起机械10偏斜。后提升柱18a和18b浮动以适应偏斜。
[0076]
液压流体可在液压缸150a和150b的上室160a和160b之间来回移动,以及在液压缸150a和150b的下室162a和162b之间来回移动,以使提升柱18a和18b浮动,以适应改变的地形斜率。
[0077]
在步骤208,可以监测机械10的斜率。例如,斜率传感器112可用于监测框架12的侧向(例如,从左到右)斜率。另外,可以监测管线170a-170e和172中的压力以确定与其附接的
提升柱18a和18b的高度。在实例中,可以用压力传感器直接监测管线170a
–
170e和172中的压力。
[0078]
另外,可以通过考虑可能影响机械10偏斜的因素来监测机械10的斜率。此类因素可包括机械10上的各种储罐(特别是偏心的那些)内的流体重量的影响,以及从框架12悬置的传送器的位置的影响。因此,储罐传感器122和传送器传感器126可以向控制器132提供输入,所述控制器可以配置成在当前操作条件下计算或评估机械10的重心(cg)。
[0079]
在步骤210a
–
210c,可以评估导致机械10偏斜的各种因素。
[0080]
在步骤210a,锁定阀128a-128b和浮动阀129a-129b可以在阈值重心(cg)处或在任何时间,由冷铣刨机械10的操作要求或作业表面24的操作者视觉评估,基于在控制面板32处提供的反馈而由用户手动操作。阈值重心(cg)可包括机械10的重心(cg)接近或处于操作包络190的边界的压力。控制器132可以配置成基于本文所述的因素计算机械10的当前重心(cg),并且将计算出的重心与存储在数据库134的查找表中的值进行比较,以确定重心相比于操作包络190在何处。因而,操作包络190可包括限定周边的多个重心值,重心(cg)可保持在所述周边内。相对于操作包络190的机械10的当前重心(cg)可以在控制面板32处传达给机械10的操作者,使得操作者可以根据需要采取行动。
[0081]
在步骤210b,可以从斜率传感器112确定机械10的定向。斜率传感器112的感测的斜率可用于控制器132的计算,以评估机械10的重心(cg)和操作包络190。来自斜率传感器112的信息可以在控制面板32处显示,以便于阀128a和128b以及阀129a和129b的手动操作,或便于由控制器132自动操作此类阀。
[0082]
在步骤210c,进入控制器132的辅助输入可用于确定储罐124的填充水平和副传送器40b的位置。控制器132可以使用填充水平和传送器位置来评估机械10的重心(cg)和操作包络190。来自储罐传感器122和传送器传感器126的信息可以在控制面板32处显示,以便于阀128a和128b以及阀129a和129b的手动操作,或便于由控制器132自动操作此类阀。
[0083]
在步骤212,当满足阈值条件时,可操作锁定阀128a和128b。阈值条件可以是用户的决定。如上所述,阈值条件可以是引起重心(cg)超出机械10的操作包络190的副传送器40b的位置移位。阈值条件可由储罐124内的液位的下降、副传送器40b的位置变化或框架12的定向变化或它们的组合引起或影响。例如,当由于偏斜条件而确定不稳定性问题时,锁定阀128a和128b可以停用以移动到关闭位置,其中在止回阀配置中只允许单向流动通过每个阀。锁定阀128a和128b可以配置成锁止沿相反方向的流动。因此,锁定阀128a可防止流向图3中的右侧,并且锁定阀128b可防止流向图3中的左侧。当关闭时,液压流体变为截留在上室160a和160b中,从而锁定提升柱18a和18b的位置。在两个锁定阀128a和128b均关闭的情况下,两个提升柱18a和18b均被锁定,而浮动阀129a和129b断电到图3的默认位置。
[0084]
在步骤214,可以操作浮动阀129a和129b中的一个。具体而言,可以切换用于远离偏斜方向的腿部的浮动阀。因此,如果机械10向左侧倾斜,浮动阀129b可以切换以经由浮动压力阀151b将上室160b连接到压力件184。如果机械10向右侧倾斜,浮动阀129a可以切换以经由浮动压力阀151b将上室160a连接到压力件184。因而,远离偏斜方向的腿部可配置为在横穿起伏地形时浮动,例如延伸或缩回。
[0085]
在步骤216,关闭锁定阀128a和128b可防止提升柱18a和18b缩回以避免不稳定状态(例如,机械10的重心(cg)的移动免于移动到操作包络190之外)。提升柱18a和18b中相反
一个可以浮动以维持与工作表面24的牵引,例如通过提供有来自浮动压力阀151b和低压供应阀151c的p2的低压流体,以维持与其连接的推进装置与地形接合。因此,机械10可以继续在稳定性控制模式中操作,直到工作表面24的地形变为更平整的条件。
[0086]
方法200可以从步骤216返回到步骤208以再次监测侧斜率条件。如果侧斜率条件继续超过阈值条件,则锁定阀128a和128b以及浮动阀129a-129b可继续被激活以锁定一个腿部并且使另一个腿部浮动。方法200可以继续步骤218a和218b,以根据需要分别向上或向下调整锁定的腿部的高度,例如由于在稳定性控制模式中工作表面24的斜率改变。如果不符合阈值条件,则可以在步骤220重置阀128a-129b以退出稳定性控制模式。
[0087]
在步骤218a,可以通过例如打开用于在偏斜方向的腿部的锁定阀来升高锁定腿部。因此,例如,在锁定阀128b打开之后,可以允许加压液压流体经由控制阀149进入上室160a,但是通过锁定阀128a保持关闭而防止加压液压流体进入上室160b。同样,负载保持阀151a可打开或构造成允许单向流动到上室160a中。
[0088]
在步骤218b,可例如通过调整控制阀149以将下室162a连接到储罐184来降低锁定腿部。因此,可以允许液压流体经由控制阀149离开上室160a。同样,负载保持阀151a可打开或构造成允许单向流动到上室160a中。两个锁定阀128a和128b可配置成在腿部降低操作中关闭。
[0089]
在步骤220,锁定阀128a-128b和浮动阀129a-129b可以例如重置到浮动状态,其中锁定阀128a和128b在通电打开位置,并且浮动阀129a和129b停用,如图3中所示。此后,冷铣刨机10可继续行驶并且监测阈值情形。
[0090]
工业适用性
[0091]
本技术描述了用于控制机械的竖直移动的各种系统和方法,所述机械包括独立安装的推进元件或运输装置。推进元件或运输装置可安装到可用液压系统控制的提升柱,例如液压缸。例如,可以操作推进系统的液压缸以维持机械的期望倾斜、定向或姿态,或防止机械的倾斜、定向或姿态超过阈值极限。更确切地说,可以操作液压缸以将机械的重心维持在操作包络内,以最小化不稳定风险。例如,当机械的控制器确定机械的重心接近操作包络的边缘时,可以通过允许机械的后液压缸被独立地锁定以加宽操作包络来增大重心的操作包络。具体而言,独立的后提升柱可以在偏斜方向上独立锁定,以防止机械在该方向上进一步旋转。用户可以手动操作与每个后提升柱相关联的锁定阀和浮动阀,以使机械处于稳定模式。在其它实例中,后锁定阀和浮动阀可基于操作者输入或传感器输入由控制器控制。后提升柱的独立控制可以帮助1)维持铣削滚筒的期望切割定向,以及2)维持机械的稳定性(例如,以防止翻转),以及其它考虑因素。因而,并入本公开的各个方面的施工机械能够通过能够在更广泛多种地形中操作来增加操作时间,并且可以提高操作者的安全性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1