半自动轨道螺栓作业机的制作方法
1.本发明属于轨道维护设备技术领域,尤其涉及一种半自动轨道螺栓作业机。
背景技术:
2.为实现未来铁路的高速发展,并保证列车在运行中的安全可靠,必须使铁路线路维持较好的运行状态,并能保证铁路线路可以按照制定的计划对其进行长期的维护与保养。在轨道中,线路扣件的主要目的是将钢轨与轨枕联结在一起,从而防止钢轨与轨枕在水平面上产生相对的转动,同时也保证两侧钢轨之间的转动,从而确保钢轨的平稳性。松紧轨枕的螺栓是铁路工务段的线路维护的重要作业项目,其维护目的是松紧线路的螺栓并为轨枕螺栓进行涂油。
3.目前,铁路线路的养护作业机械化程度较低,工人的劳动强度较大且维护工作的质量差、效率不高,无法适应目前增长的铁路运输工作的需求。传统的松紧轨枕螺栓也多数利用手动扳手,效率低,并且拧紧的力矩很难满足铁路维护的技术要求。
4.针对现有技术上的弊端,从铁路线路运行的发展趋向上看,铁路线护维修工作的现代化技术需要进一步的提升,需要出现自动化程度高的机电设备在维修工作中应用。
技术实现要素:
5.为实现上述技术功能,本技术方案的目的是公开一种半自动可注油的高效轨道螺栓作业机,其可使一些重体力的工作变得更加方便、快捷,进一步改善劳动条件、提高劳动生产效率,更重要的是进一步提高铁路线路的维护质量。
6.本发明的技术方案具体如下:
7.一种半自动轨道螺栓作业机,其包括一个架体,架体底部设置有轨道单边轮;架体上部设置有旋转驱动装置,所述的旋转驱动装置的底部延伸至架体底部,所述的架体铰接设置有手握压杆,手握压杆下部设置有连杆结构,通过连杆结构与套筒板手连接,连杆结构可驱动套筒板手竖向移动实现与旋转驱动装置的离合。
8.所述的架体上部设置有油泵,所述的套筒板手上设置有注油口,通过油泵可为注油口实现供油。
9.所述的连杆结构包括一个液压伸缩杆,液压伸缩杆的下部铰接有提升杆,提升杆的尾端和固定部铰接,所述的提升杆和套筒板手连接;手握压杆推动液压伸缩杆,液压伸缩杆驱动提升杆竖向移动实现套筒板手的上下移动。
10.所述的架体上部设置有控制台,其用于本半自动轨道螺栓作业机的行走,螺栓旋拧以及供油控制。
11.所述的轨道单边轮为多个,其左右对称设置在架体的底部,通过轨道单边轮实现在两侧轨道上的支撑横移。
12.所述的架体上设置有可折叠的装车手柄用于实现搬抬。
13.所述的旋转驱动装置包括驱动电机以及变速箱和扭矩传感器,通过扭矩传感器可
实现螺栓旋拧扭矩的精准控制。
14.所述的架体上部设置多组旋转驱动装置,其分别设置在架体的左右两侧,架体的底部设置有左右两组套筒板手,每组套筒扳手至少包含两个套筒扳手。
15.架体的顶面上设置有储物柜用于电池或者杂物的存放。
16.本发明的有益效果:其通过架体底部设置的轨道单边轮移动以及支撑;架体上部设置有旋转驱动装置,旋转驱动装置的底部延伸至架体底部,架体上铰接设置有手握压杆,手握压杆下部设置有连杆结构,通过连杆结构与控制套筒板手上下移动实现与旋转驱动装置的离合,以此实现旋拧驱动对螺栓进行拆卸,然后进行注油。本发明通过以上结构设置,其结构简单新颖,使用方便,可实现人为控制横移状态下的螺栓松紧驱动并注油,较现有技术大大提高了作业效率,提高了螺栓旋拧精度,是一种理想的半自动可注油的高效轨道螺栓作业机。
附图说明
17.本发明共有附图5张,其中:
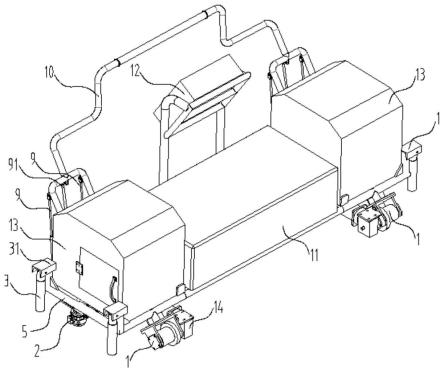
18.图1是本发明立体结构示意图;
19.图2是本发明旋转驱动装置立体开放结构示意图;
20.图3是本发明旋转驱动装置主视开放结构示意图;
21.图4是本发明侧视结构示意图;
22.图5是本发明旋转驱动装置侧视开放结构示意图;
23.附图中:1、轨道单边轮,2、套筒扳手,21、离合连接杆,3、装车手柄,31、手柄固定座,4、油泵,5、架体,6、扭矩传感器,7、行星减速机,8、驱动电机,9、液压伸缩杆,91、中部液压伸缩杆,92、提升杆,93、固定部,94、铰接轴,10、手握压杆,11、储物柜,12、控制台,13、工作单元保护壳罩,14、行进电机,15、注油口。
具体实施方式
24.下面结合附图对本发明进行进一步地描述。
25.如附图所示,一种半自动轨道螺栓作业机,其包括一个架体5,架体5为平板结构设置,其底部四角处皆设置有轨道单边轮1,并且每个轨道单边轮1上皆设置有一个行进电机14对其进行移动驱动,四个轨道单边轮左右对称设置在架体1的底部,通过轨道单边轮1实现在两侧轨道上的支撑横移。
26.架体5的上部左右对称设置有两个工作单元保护壳罩13,每个工作单元保护壳罩13内部设置有两组旋转驱动装置,所述的旋转驱动装置的底部延伸至架体5的底部实现对套筒扳手2的驱动,本装置采用的自动旋拧并且旋拧力矩可实现精准调控,其通过以下具体结构实现:旋转驱动装置包含一个驱动电机8,驱动电机8连接行星减速机7,行星减速机7和扭矩传感器6连接,扭矩传感器6通过离合连接杆21与套筒扳手2连接并实现驱动。
27.所述的架体上设置有竖向架,在竖向架上设置有控制台12用于对整个设备中的行走,螺栓旋拧以及供油状态实现控制。竖向架上铰接设置有手握压杆10,手握压杆10下部设置有连杆结构,如图4、5所示,所述的连杆结构包括一个和手握压杆10铰接的液压伸缩杆9,液压伸缩杆9的下部铰接有提升杆92,提升杆92的尾端和架体上焊接至一体的固定部93铰
接,所述的提升杆92上设置有条形槽,通过条形槽和套筒板手2上的铰接轴94滑动连接,工作状态下,手握压杆10推动液压伸缩杆9,液压伸缩杆9驱动提升杆92竖向移动实现套筒板手2连同离合连接杆21的上下移动,通过此种结构实现套筒板手2工作状态的调整。
28.进一步的,所述的架体1的上部,靠近工作单元保护壳罩13设置有油泵4,所述的套筒板手2上设置有注油口,通过油泵可为注油口15实现供油。
29.再进一步的,所述的架体1的左右两侧上,通过手柄固定座31焊接设置有可折叠的装车手柄3用于实现搬抬。架体1的顶面上还设置有储物柜11用于锂电池或者杂物的存放,锂电池用于行进电机14以及驱动电机8的电力供应。
30.本半自动轨道螺栓作业机使用时,需要人工通过装车手柄3将整个螺栓作业机抬到铁轨上使轨道单边轮1骑上钢轨,在控制台12上打开电源开关使得锂电池开始供电,一方面提供电动力促使行进电机16带动轨道单边轮1向前行走。另一方面,操纵控制台12使其进入作业模式,手动压下手握压杆10,同时驱动电机8提供动力给行星减速机7,再经过套筒扳头2实现螺栓的拧紧和旋松,扭矩传感器6检测套筒扳头2的扭矩,套筒扳头2上所带的注油口15通过油泵4提供动力加注润滑油,作业完成后手握压杆10在液压伸缩杆9的弹力作用下自动返回原来位置,套筒扳头2脱离行星减速机7的驱动,套筒扳手的扭矩可通过控制台12上带的显示屏实时显示,采用控制系统以及显示系统与扭矩传感器连接并实现控制为机械领域通用技术,在此不针对电控细节进行赘述。
技术特征:
1.一种半自动轨道螺栓作业机,其包括一个架体,其特征在于:架体底部设置有轨道单边轮;架体上部设置有旋转驱动装置,所述的旋转驱动装置的底部与架体底部套筒板手连接;所述的架体铰接设置有手握压杆,手握压杆下部设置有连杆结构,通过连杆结构与套筒板手连接。2.如权利要求1所述的半自动轨道螺栓作业机,其特征在于:所述的架体上部设置有油泵,所述的套筒板手上设置有注油口。3.如权利要求1所述的半自动轨道螺栓作业机,其特征在于:所述的连杆结构包括一个液压伸缩杆,液压伸缩杆的下部铰接有提升杆,提升杆的尾端和固定部铰接,提升杆和套筒板手连接;手握压杆推动液压伸缩杆,液压伸缩杆驱动提升杆竖向移动实现套筒板手的上下移动。4.如权利要求1所述的半自动轨道螺栓作业机,其特征在于:所述的架体上部设置有控制台。5.如权利要求1所述的半自动轨道螺栓作业机,其特征在于:所述的轨道单边轮为多个,其左右对称设置在架体的底部。6.如权利要求1所述的半自动轨道螺栓作业机,其特征在于:所述的架体上设置有可折叠的装车手柄。7.如权利要求1所述的半自动轨道螺栓作业机,其特征在于:所述的旋转驱动装置包括驱动电机以及变速箱和扭矩传感器。8.如权利要求1所述的半自动轨道螺栓作业机,其特征在于:所述的架体上部设置多组旋转驱动装置,其分别设置在架体的左右两侧,架体的底部设置有左右两组套筒板手,每组套筒扳手至少包含两个套筒扳手。
技术总结
本发明公开了一种半自动轨道螺栓作业机,其通过架体底部设置的轨道单边轮移动以及支撑;架体上部设置有旋转驱动装置,旋转驱动装置的底部延伸至架体底部,架体上铰接设置有手握压杆,手握压杆下部设置有连杆结构,通过连杆结构与控制套筒板手上下移动实现与旋转驱动装置的离合,以此实现旋拧驱动对螺栓进行拆卸,然后进行注油。本发明可实现人为控制横移状态下的螺栓松紧驱动并注油,较现有技术大大提高了作业效率,提高了螺栓旋拧精度。提高了螺栓旋拧精度。提高了螺栓旋拧精度。
技术研发人员:李勇 李世贵 孟建军
受保护的技术使用者:河北鑫能轨道交通设备科技有限公司
技术研发日:2022.07.20
技术公布日:2022/9/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1