一种基于BIM技术的连续梁转体施工方法与流程
一种基于bim技术的连续梁转体施工方法
技术领域
1.本发明涉及桥梁工程施工技术领域,特别是涉及一种基于bim技术的连续梁转体施工方法。
背景技术:
2.桥梁转体施工是利用摩擦系数很小的球铰及滑道与转盘结构,以简单的设备,将已浇筑完成的两侧庞大桥梁结构,整体旋转安装到位。
3.中铁三局赣深客专跨龙河及京九铁路特大桥(48+80+48)m连续梁,针对该桥梁结构形式复杂,采用(48+80+48)m转体结构组合体系,结构受力较复杂;临近既有设施等施工干扰大,安全风险高;转动系统球铰安装精度要求高;大吨位转体、中跨和龙及边跨和龙等施工难点,转动系统球铰安装精度要求高,施工难度大。该桥梁上跨京九铁路安全风险高,其中大吨位转体、中跨和龙及边跨和龙施工难度大。
4.专利号为cn201611149232.9的中国专利公开了“跨铁路桥转体连续梁施工方法”,公开了一种可适用于墩身距离既有铁路坡脚距离小时连续梁施工方法。采用中心支承转动、辅以平衡撑脚稳定的方案,并以中心支承为转体体系,在上下层承台间设置转动体系;上转盘两侧采用千斤顶作为牵引千斤顶,另设两台千斤顶作为启动助推千斤顶;牵引反力座布置于下承台,牵引索布置于上承台底部砼托盘上;箱梁浇筑完成后,启动牵引系统,上承台、墩身及箱梁形成的整体绕球铰中心位置的销轴旋转角度,到达位置后采用砼填充上下承台间的缝隙进行封固转盘,进行合拢段施工。但是该领域仍然有许多待解决的技术难题,例如如何方便实现对转体旋转角度这一关键技术参数进行精确控制,转动体系的各部件精确定位难、高程控制难等问题。
5.bim的核心是通过建立虚拟的建筑工程三维模型,利用数字化技术,为这个模型提供完整的、与实际情况一致的建筑工程信息库。该信息库不仅包含描述建筑物构件的几何信息、专业属性及状态信息,还包含了非构件对象(如空间、运动行为)的状态信息。借助这个包含建筑工程信息的三维模型,大大提高了建筑工程的信息集成化程度,从而为建筑工程项目的相关利益方提供了一个工程信息交换和共享的平台。因此为了实现转动体系精准、快速施工,对工程设计进行优化调整,保障施工进度及施工质量,实现工程精细化管理,需要提供一种基于bim技术的连续梁转体施工方法。
技术实现要素:
6.基于以上问题,本发明公开了一种基于bim技术的连续梁转体施工方法。
7.为实现上述目的,本发明提供如下技术方案:
8.本发明提供一种基于bim技术的连续梁转体施工方法,具体步骤包括:
9.步骤一、建立连续梁转体的bim模型,所述bim模型至少包括灌注桩基模型、转体体系模型和主墩柱模型;
10.步骤二、基于所述bim模型进行结构验算和碰撞检查,确定所述连续梁转体中的空
间位置和高程;
11.步骤三、基于所述bim模型进行称重试验,确定连续梁转体中的配重方案,计算纵横向稳定系数,制定转体体系方案;
12.步骤四、根据所述bim模型调节后的转体体系方案,进行连续梁转体施工并试转体,监测该转体体系方案是否稳定,若稳定,则正式转体,若不稳定,则调整转体体系方案并再次试转体,直至稳定再正式转体;
13.步骤五、正式转体,并设置防倾保险体系和限位控制体系;
14.步骤六、进行球铰封铰施工;
15.步骤七、转体就位后,施工合龙段。
16.优选地,所述灌注桩基模型至少包括中墩模型和边墩模型;
17.所述转体体系模型至少包括球铰模型、下转盘模型、上转盘模型、转体牵引系统模型、助推系统模型和轴线微调系统模型。
18.优选地,所述结构验算和碰撞检查的方法为:利用所述bim模型的三位可视化,获取普通钢筋和预应力管道的碰撞点,并标记在所述bim模型上。
19.优选地,所述称重试验的方法为:
20.设定连续梁绕所述球铰发生刚体转动,转动力矩与竖向顶力之间,切向转动位移与竖向位移之间为线性关系;
21.对连续梁模型施加转动力矩,测试球铰模型的切向转动位移,获取转动力矩-切向位移曲线和顶力-位移曲线;若存在某个转动力矩使切向转动位移发生突变,则此时球铰模型的状态为静摩擦与动摩擦的临界状态,将该转动力矩在转动力矩-切向位移曲线上对应的点转换为顶力-位移曲线上的点并定义为临界点。
22.优选地,确定连续梁转体中的配重方案的方法是:采用梁体纵向倾斜配重方案,连续梁在梁轴线方向呈倾斜态势,形成两点竖向支承,测试转动体的不平衡力矩、偏心距、摩阻力矩及静摩擦系数;
23.其中配重的大小为:
24.此时配重后的偏心矩为:
[0025][0026]
其中,配重后偏心矩的取值范围在[5cm,15cm]。
[0027]
优选地,试转体的方法为:
[0028]
按照配重方案执行,测试转动体的不平衡力矩实际值、偏心距实际值、摩阻力矩实际值及静摩擦系数实际值,检算纵横向稳定系数,控制纵横向稳定系数大于1.5,监测球铰间的摩擦系数及观察是否发生异常情况。
[0029]
优选地,正式转体的方法为:转体启动;进行平转;当转体基本到位之后减速,采取点动操作,直到转体就位;进行转体定位。
[0030]
优选地,所述防倾保险体系包括内环保险腿和千斤顶,所述内环保险腿设置在球铰内部,所述千斤顶布置在滑道的外侧。
[0031]
优选地,所述限位控制体系用于转体转动到位出现偏差后需要对转体进行限位和调整,具体包括转体限位装置和微调装置。
[0032]
优选地,转体就位后,施工合龙段,合龙段施工过程中由边至中进行,先边跨合龙,再中跨合龙。
[0033]
与现有技术相比,本发明有以下优势:
[0034]
本发明提出了一种基于bim技术的连续梁转体施工方法,将bim技术引入,并利用revit、3dmax等软件结合现场施工,进行了实际的应用,迅捷的掌握了施工进度,提高了施工的质量、保证了施工安全、缩短了施工工期。其中利用创建好的bim模型有限元分析,不但可以缩减建模时间,提高模型利用率,而且通过有限元分析可以保证连续梁节段施工整体质量,对本桥实施了有效的施工监控,保证了成桥后各构件线型和内力状态符合设计要求,大大降低了测量误差,降低风险,提高了经济效益。
附图说明
[0035]
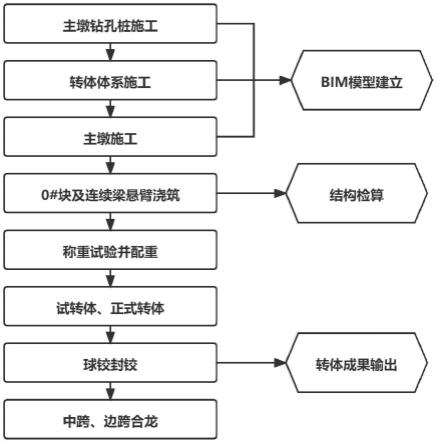
附图1是本发明一种基于bim技术的连续梁转体施工方法中的方法流程示意图;
[0036]
附图2是本发明一种基于bim技术的连续梁转体施工方法中边墩模型的构建示意图;
[0037]
附图3是本发明一种基于bim技术的连续梁转体施工方法中转体体系模型的构建示意图;
[0038]
附图4是本发明一种基于bim技术的连续梁转体施工方法中普通钢筋和预应力管道碰撞检测详细位置的可视化示意图。
具体实施方式
[0039]
为使本发明实施例的目的和技术方案更加清楚,下面将结合本发明实施例,对本发明的技术方案进行清楚、完整地描述。
[0040]
本发明提供一种基于bim技术的连续梁转体施工方法,如图1至图4所示,具体步骤包括:
[0041]
步骤一、建立连续梁转体的bim模型,所述bim模型至少包括灌注桩基模型、转体体系模型和主墩柱模型;
[0042]
所述灌注桩基模型至少包括中墩模型和边墩模型;桩基全部采用钻孔灌注桩基础,其中两个边墩分别为4#墩8根桩,7#墩9根桩,两个中墩个18根桩,共计35根桩,同时中墩和边墩的构造也有很大不同。桩基和桥墩模型的创建相对简单,通过revit软件中公制常规族的拉伸或者放样功能即可创建,并且同类型的构件只需修改其直径和长度参数就可形成。相比桩基的模型创建而言,墩帽的创建则较为复杂,通过嵌套族的方式经过多次拉伸、放样融合,然后根据各部件的空间位置进行放置。中墩模型和边墩模型如图2所示。
[0043]
如图3所示,所述转体体系模型至少包括球铰模型、下转盘模型、上转盘模型、转体牵引系统模型、助推系统模型和轴线微调系统模型,球铰为钢制,分上下两片,分别为上球铰和下球铰,竖向承载力50000kn,是转体施工的关键结构,采用专业厂家成套产品。
[0044]
下转盘是转体重要支撑结构,布置有转体系统的下球铰、撑脚的环形滑道、转体牵引系统的反力座、助推系统、轴线微调系统等;下转盘利用下承台布置有局部承压钢筋网以
及连接钢筋;下球铰、滑道安装要求精度高,应预先埋好定位骨架,通过调整螺栓精确调平;滑道、下球铰平面各平面相对高差不大于0.5mm,调整完成后浇筑c50混凝土。转体完成后,通过封铰混凝土连接,与上转盘共同形成承台。
[0045]
上转盘是球铰、撑脚与上转盘相连接的部分,又是转体牵引力直接施加的部分;上转盘撑脚为转体时保持转体结构平稳的保险腿;从保持转体结构的稳定性和方便施工出发,在上转盘周围对称布置6对撑脚;在撑脚的下方(既下盘顶面)设有1m宽的滑道,滑道中心半径3.6m,转体时保险撑脚可在滑道内滑动,以保持转体结构平稳;为保证转体的顺利实施,整个滑道面需在一个水平面上,其相对高差不大于0.5mm。撑脚为双圆柱形,下设20mm厚钢走板。双圆柱为两个钢管,撑脚钢管内灌注c50微膨胀混凝土;撑脚在工厂加工,在下转盘混凝土灌注完成后、上球铰安装就位时即安装撑脚,并在撑脚走板下支垫20mm钢板(作为转体结构与滑道的间隙);上转盘施工完成后抽掉垫板。转动前在接触下滑道的支撑腿与下面铺装3mm四氟滑板,以减小转动时的摩擦力。
[0046]
转体牵引系统主要为牵引反力座、牵引索和牵引动力系统。牵引反力座设计为c50钢筋混凝土,牵引索为12束φ15.2预应力钢绞线,转体动力系统由2套液压千斤顶、2台液压泵站和1台主控台通过高压油管和电缆线连接而成。
[0047]
助推系统主要为助推反力座、助推动力系统组成。助推反力座设计为c50钢筋混凝土,助推动力系统为3套液压千斤顶。
[0048]
参照球饺施工图纸,下转盘采用公制常规模型建族,首先根据设计图纸给定的详细尺寸创建下转盘主体、空心圆盘、肋板和角钢族,之后按照相应族的空间位置关系进行嵌套,最后形成球较下转盘。特别地安装滑片的空心圆盘族的创建需要先通过旋转方式创建实心圆盘,然后根据滑片空间位置创建空心滑片再通过剪切命令即可创建空心圆盘(剪切时需要单个滑片依次剪切)。
[0049]
主墩柱模型包括5#墩柱25m分5次浇筑,6#墩柱30m分6次浇筑;墩柱混凝土为c35(t2)。
[0050]
连续梁0号块长度为12m,顶板宽度为12.6m,底板宽度为6.7m,高度为6.635~5.943m,混凝土方量为251.223m3,重量为653.179t,顶板厚0.385m,底板厚1~0.921m,腹板厚0.9m。连续梁长176米。箱梁顶宽12.6m,底宽6.7m,顶板厚0.385-0.635m,腹板厚度腹板厚分别为0.48-0.9m。
[0051]
步骤二、基于所述bim模型进行结构验算和碰撞检查,确定所述连续梁转体中的空间位置和高程;
[0052]
如图4所示,所述结构验算和碰撞检查的方法为:利用所述bim模型的三位可视化,获取普通钢筋和预应力管道的碰撞点,并标记在所述bim模型上。该转体连续梁0#段具有节段长、高度高、钢筋和预应力筋纵横交错以及操作空间小,尤其支座上方钢筋密集分布,混凝土流动及振捣非常困难,容易造成支座附近混凝土不密实,甚至容易产生露筋、空洞、蜂窝麻面等质量通病,也会严重影响连续梁的质量。本项目决定运用bim的新理念、新技术、新方法来研究连续梁0#段施工,创建三维模型,使用bim模型的三维可视化功能,钢筋优化、预应力管道三维布置及0#段振捣方案。同时根据优化、碰撞检查的成果,进行三维可视化技术交底,以使作业人员了解施工作业要点,提高工作效率、减少返工,并预防安全风险。
[0053]
步骤三、基于所述bim模型进行称重试验,确定连续梁转体中的配重方案,计算纵
横向稳定系数,制定转体体系方案;
[0054]
称重试验的方法为:
[0055]
设定连续梁绕所述球铰发生刚体转动,转动力矩与竖向顶力之间,切向转动位移与竖向位移之间为线性关系;
[0056]
对连续梁模型施加转动力矩,测试球铰模型的切向转动位移,获取转动力矩-切向位移曲线和顶力-位移曲线;若存在某个转动力矩使切向转动位移发生突变,则此时球铰模型的状态为静摩擦与动摩擦的临界状态,将该转动力矩在转动力矩-切向位移曲线上对应的点转换为顶力-位移曲线上的点并定义为临界点。
[0057]
配重的目的是使转动体达到平衡状态,提高转体过程的稳定性。常用的配重方案有两种:
①
梁体绝对平衡配重方案;
②
梁体纵向倾斜配重方案。绝对平衡配重对转体的平稳反而不利,目前一般采用第
②
种方案。
[0058]
确定连续梁转体中的配重方案的方法是:采用梁体纵向倾斜配重方案,连续梁在梁轴线方向呈倾斜态势,形成两点竖向支承,即梁轴线上桥墩一侧的撑脚落下接触滑道,另一侧的撑脚抬起离开滑道。测试转动体的不平衡力矩、偏心距、摩阻力矩及静摩擦系数;
[0059]
其中配重的大小为:
[0060]
此时配重后的偏心矩为:
[0061][0062]
其中,为了保证配重卸载的安全,配重应设置在非跨铁路孔一侧,配重后偏心矩的取值范围在[5cm,15cm]。
[0063]
步骤四、根据所述bim模型调节后的转体体系方案,进行连续梁转体施工并试转体,监测该转体体系方案是否稳定,若稳定,则正式转体,若不稳定,则调整转体体系方案并再次试转体,直至稳定再正式转体;
[0064]
转体中使用的液压及电器设备出厂前要进行测试和标定,并在厂内进行试运转,试转体的方法为:
[0065]
按照配重方案执行,转体前由具备相应专业资质的球铰厂家进行现场称重,测试转动体的不平衡力矩实际值、偏心距实际值、摩阻力矩实际值及静摩擦系数实际值,检算纵横向稳定系数,控制纵横向稳定系数大于1.5,检查转体过程中转体体系结构是否稳定,关键受力部位是否发生变形开裂等异形情况,观察牵引设备的性能以及测定上下球铰间的摩擦系数,预紧钢铰线,故而在正式转体之前进行试转体,试转体一切正常方可进行正式转体,否则查明原因,提出整改方案。
[0066]
步骤五、正式转体,并设置防倾保险体系和限位控制体系;
[0067]
正式转体的方法为:
[0068]
转体启动;同步启动牵引千斤顶(zld450型),吨位达到计算动摩阻力。助推千斤顶分级加力,按100kn一级分级加力,直至撑脚走板水平位移观测确定启动,并记录静摩阻力。
[0069]
进行平转;根据铁路部门确定的转体作业时间,两幅桥同步进行转体。两桥同时启动,现场设同步启动指挥员,用对讲机通讯指挥。千斤顶公称油压相同,转体采用同种型号
的两套液压设备,转体时控制好油压表压力。在连续梁上安装观察点,转体过程中安排专人观测,随时反映双幅转体速度是否相同。转体前在转盘上布置刻度并编号,转体过程中随时观测两个转盘的转过刻度是否一致。在转盘钢铰线上做好标记,观察两个转体的钢铰线是否等速。
[0070]
平转过程中测量人员反复观测塔柱轴线偏位,梁端部位高程变化。匀速转动,平转基本到位(距设计位置约1m处)减速,降低平转速度,距设计位置0.5m处,采取点动操作,并与测量人员配合确认点动后梁端弧长。在距设计位置0.1m处停转,测量轴线,根据差值,精确点动控制定位,防止超转。
[0071]
转体就位后,精确调整转体倾斜位置,并用型钢将上下转盘支撑固定。利用临时墩墩顶上设置的千斤顶,精确地调整梁体端部标高,并在撑脚底部支垫钢板进行固定。以最短的时间完成上下承台固结。
[0072]
平转过程中,所使用的牵引索钢铰线应尽量左、右均匀分布。连续千斤顶公称油压相同,转体采用同种型号的两套液压设备,转体时控制好油表压力,并进行同步观测。收紧平转牵引索,在索力达到牵引力时持荷不动。开启助推千斤顶,在转盘中心对称位置按100kn分级加载助推力,直到结构开始转动。牵引索同时跟进,连续张拉牵引,使整个转体结构匀速平转。当匀速平转至梁体边缘接近边墩时,应观测梁底标高与墩顶间支撑结构的高差情况,必要时对梁端标高进行调整。在结构旋转到距设计位置约2
°
时应放慢转速,牵引千斤顶改用手动控制,距设计位置相差1
°
时,可停止牵引转动,借助惯性就位;为保证转体就位正确,预埋限位型钢且加橡胶缓冲垫,即使发生转体过位,还可以利用下盘撑脚做支撑,用千斤顶反推就位。测量梁体轴线,和高程,并计算差值,采用上转盘下设置的竖向千斤顶微调系统,对梁体纵横向标高进行微调。检查限位系统,点动牵引索连续张拉千斤顶,至转体部分梁体与边墩现浇段梁体中轴线重合。至此转体基本就位。
[0073]
所述防倾保险体系包括内环保险腿和千斤顶,防倾保险体系是转体施工方法中的重要保证措施,根据设计构造的特点,转体过程中,转体的全部重量由球铰承担,但转体结构受外界条件或施工的影响容易出现倾斜。因此,须设置内环保险腿和调整倾斜的千斤顶。利用上转盘上环形布置的撑脚作为内环保险腿,与下滑道间预留3~6mm间隙,在转体荷载作用下,沿滑道转动时留有间隙,便于确定荷载状态和转体姿态的调整。滑道上清理干净,涂抹黄油四氟粉,便于撑脚滑移。沿滑道外侧布置4台千斤顶,便于转体施工过程中,调整转体倾斜姿态。根据设计要求及确保转体结构稳定,转体结构重心在顺桥轴线上要求偏向边跨侧。(使整个转体结构在转动过程中由球铰及其后两钢撑脚三点受力,形成三点支承)若转体重心位置有偏差,可以通过梁上堆载调整。(确认重心的方法,采用调整姿态的千斤顶施加顶力,确认边跨侧两后撑脚竖向位移脱空时对应的顶力,反算出转体结构重心位置。
[0074]
所述限位控制体系用于转体转动到位出现偏差后需要对转体进行限位和调整,具体包括转体限位装置和微调装置。其中具体为:
[0075]
横桥向倾斜限位与微调:在滑道外侧对称布设四台千斤顶,一侧起顶,另一侧预留限位,起顶限位值根据实测确定。调整完毕,用型钢支撑上下转盘,撑脚与滑道间隙塞钢板固定。
[0076]
水平偏转限位和微调:利用下转盘上的千斤顶反力座作为支点,顶推上转盘下撑脚,调整转体轴线偏位。调整到位后在撑脚与千斤顶反力座之间设置限位梁。
[0077]
步骤六、进行球铰封铰施工;梁体转体就位后,在两端利用已架设好的临时支墩固定梁体以保证梁体的稳定性,然后进行封铰施工。采用帮条焊焊接预埋基础和实体块中的钢筋,焊缝长度满足规范要求。立模浇筑c50微膨胀封铰混凝土,保证上下转盘间混凝土的整体性。
[0078]
步骤七、转体就位后,施工合龙段。转体就位后,开始施工合龙段。采用吊架模板施工,施工时由边至中进行,即先边跨合龙,最后中跨合龙。
[0079]
本发明将bim引入到施工过程中,提高了施工的质量、保证了施工安全、缩短了施工工期。通过创建转体桥、平衡系统、牵引系统等bim模型建立施工模拟,提前发现转体中存在的危险源和安全隐患,优化施工组织设计;利用bim的可视化特点,对施工过程进行碰撞检查,提前发现施工过程碰撞点进行优化;对本桥实施有效的施工监控,确保施工过程安全,同时保证成桥后各构件的线形和内力状态符合设计要求。
[0080]
以上仅为本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1